PIC הוא ממשק היקפי לממשק היקפי אשר פותחה בשנת 1993 על ידי המיקרו-בקרים הכלליים. היא נשלטת על ידי תוכנה ומתוכנתת בצורה כזו שהיא מבצעת משימות שונות ושולטת בקו דור. מיקרו-בקרי PIC משמשים ביישומים חדשים שונים כגון סמארטפונים, אביזרי שמע ומכשירים רפואיים מתקדמים.

PIC מיקרו-בקרים
קיימים בשוק הרבה תמונות PIC שנעות בין PIC16F84 ל- PIC16C84. סוגי PIC אלה הם PICs פלאש במחיר סביר. Microchip הציגה לאחרונה שבבי פלאש מסוגים שונים, כגון 16F628, 16F877 ו- 18F452. מחיר ה- 16F877 כפול ממחיר ה- 16F84 הישן, אך הוא פי שמונה מגודל הקוד, עם יותר זיכרון RAM והרבה יותר סיכות קלט / פלט, ממיר UART, A / D והרבה יותר תכונות.
אדריכלות PIC מיקרו-בקרים
ה מיקרו-בקר PIC מבוסס על ארכיטקטורת RISC. ארכיטקטורת הזיכרון שלה עוקבת אחר דפוס הרווארד של זיכרונות נפרדים לתוכנה ולנתונים, עם אוטובוסים נפרדים.

ארכיטקטורת מיקרו-בקר PIC
1. מבנה זיכרון
ארכיטקטורת ה- PIC מורכבת משני זיכרונות: זיכרון תוכנה וזיכרון נתונים.
זיכרון תוכנית: זהו שטח זיכרון 4K * 14. הוא משמש לאחסון הוראות 13 סיביות או קוד התוכנית. לנתוני זיכרון התוכנית ניתן לגשת באמצעות מונה מונה התוכנה המחזיק בכתובת זיכרון התוכנית. הכתובת 0000H משמשת כמרחב זיכרון לאפס ו 0004H משמשת כשטח זיכרון להפריע.
זיכרון נתונים: זיכרון הנתונים מורכב מ- 368 בתים של RAM ו- 256 בתים של EEPROM. 368 בתים של זיכרון RAM מורכב ממספר בנקים. כל בנק מורכב מרשומות למטרות כלליות ומרשמות פונקציות מיוחדות.
רושמי הפונקציות המיוחדות מורכבים מרשומות בקרה לשליטה על פעולות שונות של משאבי השבבים כמו טיימרים, ממירים אנלוגיים לדיגיטליים , יציאות טוריות, יציאות קלט / פלט וכו '. לדוגמה, רישום TRISA שניתן לשנות את הסיביות שלו בכדי לשנות את פעולות הקלט או הפלט של היציאה A.
המרשמים למטרות כלליות מורכבים מרשמים המשמשים לאחסון נתונים זמניים ועיבוד תוצאות הנתונים. רושמים למטרות כלליות אלה הם כל רושמים של 8 סיביות.
מרשם עבודה: הוא מורכב ממרחב זיכרון המאחסן את האופרטים לכל הוראה. זה גם מאחסן את התוצאות של כל ביצוע.
רישום סטטוס: סיביות רישום המצב מציינות את מעמד ALU (יחידת לוגיקה אריתמטית) לאחר כל ביצוע ההוראה. הוא משמש גם לבחירת אחד מ -4 הבנקים של ה- RAM.
רישום בחירת קבצים: הוא משמש כמצביע לכל פנקס אחר למטרות כלליות. היא מורכבת מכתובת קובץ רישום והיא משמשת בטיפול עקיף.
רישום למטרות כלליות נוספות הוא רישום הנגד של התוכנית, שהוא רישום של 13 סיביות. חמשת הביטים העליונים משמשים כ- PCLATH (Program Counter Latch) כדי לתפקד באופן עצמאי כמו כל רשום אחר, וה 8-bits התחתונים משמשים כבסיסי נגד התוכנית. מונה התוכנית משמש כמצביע להוראות המאוחסנות בזיכרון התוכנית.
EEPROM: הוא מורכב מ- 256 בתים של שטח זיכרון. זהו זיכרון קבוע כמו ROM, אך ניתן למחוק ולשנות את תוכנו במהלך הפעלת המיקרו-בקר. ניתן לקרוא את התוכן ב- EEPROM או לכתוב אותו באמצעות רושמי פונקציות מיוחדים כמו EECON1, EECON וכו '.
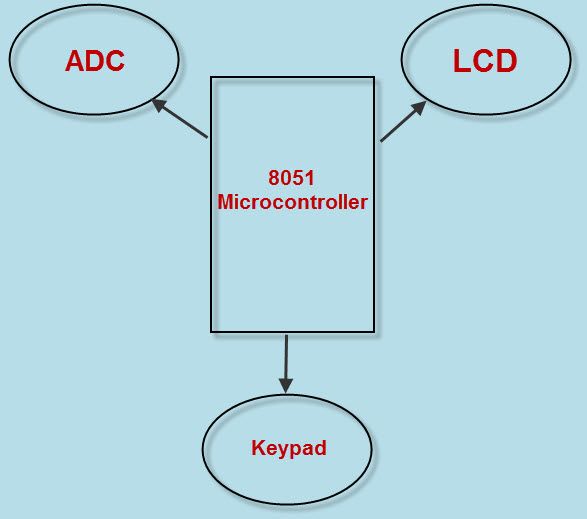
2. יציאות קלט / פלט
סדרת PIC16 מורכבת מחמש יציאות, כגון יציאה A, יציאה B, יציאה C, נמל D, ונמל E.
נמל A: זהו יציאת 16 סיביות, אשר יכולה לשמש ככניסה או כניסה לפלט על סמך הסטטוס של רישום TRISA.
נמל ב ': זהו יציאה של 8 סיביות, שיכולה לשמש גם כיציאת קלט ופלט. 4 מהסיביות שלו, כאשר הן משמשות כקלט, ניתנות לשינוי עם אותות הפסקה.
נמל C: זהו יציאת 8 סיביות שפעולתה (קלט או פלט) נקבעת על פי מצב רישום TRISC.
נמל D: זהו יציאת 8 סיביות, שמלבד היותה יציאת קלט / פלט, משמשת יציאת עבדים לחיבור אל ה- מיקרו - מעבד אוֹטוֹבּוּס.
נמל E: זהו יציאת 3 ביט המשרתת את הפונקציה הנוספת של אותות הבקרה לממיר A / D.
3. טיימרים
מיקרו בקרי PIC מורכבים משלושה טיימרים , שמתוכם טיימר 0 וטיימר 2 הם טיימרים של 8 סיביות והטיים -1 הוא טיימר של 16 סיביות, שיכול לשמש גם כ- דֶלְפֵּק .
4. ממיר A / D
מיקרו-בקר PIC מורכב מממיר 8-ערוצים, 10-bit אנלוגי לדיגיטלי. פעולת ה - ממיר A / D נשלט על ידי רושמי הפונקציות המיוחדים האלה: ADCON0 ו- ADCON1. הסיביות התחתונות של הממיר מאוחסנות ב- ADRESL (8 סיביות), והביטים העליונים נשמרים במרשם ADRESH. זה דורש מתח ייחוס אנלוגי של 5 וולט להפעלתו.
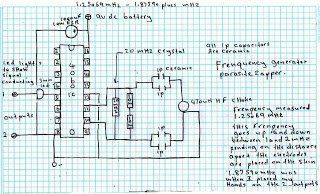
5. מתנדים
מתנדים משמשים לייצור תזמון. מיקרו בקרי PIC מורכבים מתנדים חיצוניים כמו גבישים או מתנדים RC. במקרה של מתנד קריסטל, הגביש מחובר בין שני סיכות מתנד, וערך הקבל המחובר לכל סיכה קובע את אופן הפעולה של המתנד. המצבים השונים הם מצב צריכת חשמל נמוכה, מצב גביש ומצב מהירות גבוהה. במקרה של מתנדים RC, ערך הנגד והקבע קובע את תדר השעון. תדר השעון נע בין 30 קילוהרץ ל -4 מגה הרץ.
6. מודול מק'ס:
מודול מק'ס עובד בשלושת המצבים הבאים:
מצב לכידה: מצב זה לוכד את זמן הגעתו של האות, או במילים אחרות, לוכד את הערך של טיימר 1 כאשר סיכת המק'ס עולה גבוה.
מצב השוואה: הוא משמש כמשווה אנלוגי המייצר פלט כאשר ערך ה- timer1 מגיע לערך ייחוס מסוים.
מצב PWM: זה מספק רוחב הדופק מווסת פלט ברזולוציית 10 סיביות ומחזור חובה לתכנות.
ציוד היקפי מיוחד אחר כולל טיימר Watchdog המאפס את המיקרו-בקר במקרה של תקלה כלשהי בתוכנה ואיפוס Brownout שמאפס את המיקרו-בקר במקרה של תנודות מתח אחרות ואחרות. להבנה טובה יותר של מיקרו-בקר PIC זה, אנו מעניקים פרויקט מעשי אחד שמשתמש בבקר זה להפעלתו.
פנס רחוב הזוהר בזיהוי תנועת רכב
זֶה פרויקט בקרת תאורת רחוב לד נועד לזהות את תנועת הרכב בכביש המהיר כדי להפעיל גוש אורות רחוב לפניו, ולכבות את האורות הנגררים כדי לחסוך באנרגיה. בפרויקט זה, תכנות PIC מיקרו מבוצע באמצעות מוטבע ג או שפת הרכבה.

פנס רחוב הזוהר בזיהוי תנועת רכב
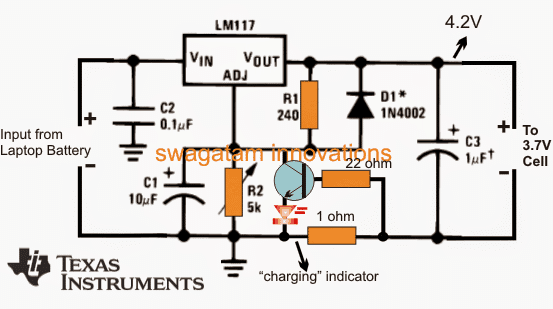
מעגל אספקת החשמל נותן את הכוח למעגל שלם על ידי ירידה, תיקון, סינון וויסות אספקת החשמל. כשאין כלי רכב על הכביש המהיר, כל האורות נותרים כבויים כדי לחסוך בחשמל. חיישני ה- IR ממוקמים משני צידי הכביש מכיוון שהם חשים את תנועת הרכבים ובתורם שולחים את הפקודות אל מיקרו-בקר להפעלת או כיבוי נוריות. חסימת נוריות LED תידלק כאשר רכב מתקרב אליו וברגע שהרכב נעלם ממסלול זה, העוצמה הופכת נמוכה או מכובה לחלוטין.
ה פרויקטים של מיקרו-בקר PIC ניתן להשתמש ביישומים שונים, כגון ציוד היקפי של משחקי וידאו, אביזרי שמע וכו '. מלבד זאת, לכל עזרה בנוגע לפרויקטים כלשהם, תוכל ליצור איתנו קשר על ידי תגובה בסעיף ההערות.