בפוסט זה אנו חוקרים את המפרט הטכני ופרטי האיתור של ה- IC L293 המהווה IC רב-כיווני רב-שנתי לנהג, ויכול לשמש ליישום מנוע מעניין רבים. מעגל מבוסס נהג יישומים, כגון להפעלת מנועים, סולנואידים ועומסי אינדוקציה אחרים (4 יחידות בנפרד או בזוגות דרך מצב דחיפה-משיכה).
איך זה עובד
ה- IC L293 כולל בעצם שני זוגות יציאות שניתן להשתמש בהם באופן עצמאי להפעלת שני עומסים נפרדים במצב משיכת דחיפה או בצורה דו כיוונית, המכונה גם מצב מוט טוטם. לחלופין, ניתן להתאים בנפרד את זוג היציאות הללו. משמש להפעלת 4 עומסים בודדים באופן חד כיווני.
פעולות העומסים הנ'ל נשלטות באמצעות פינות כניסה מתאימות, המופעלות ממעגל מתנד חיצוני או מקור PWM .
לדוגמא אם נדרש הפעלת העומס באופן מוט מוטם, ניתן להפעיל את הכניסות המתאימות לשני שלבי הנהג של ה- IC מתנד כגון דרך כמה שערי NAND , שבו שער אחד יכול להיות מחובר כמתנד ואילו השני כמהפך.
שני האותות האנטי פאזיים מאלה שערי NAND אז ניתן לחבר את הכניסות של ה- L293 להפעלת היציאות הרלוונטיות בקוטב טוטם (דחיפה-משיכה), אשר בתורו יפעיל את העומס המחובר באותה צורה.
מטלת Pinouts של ה- IC L293
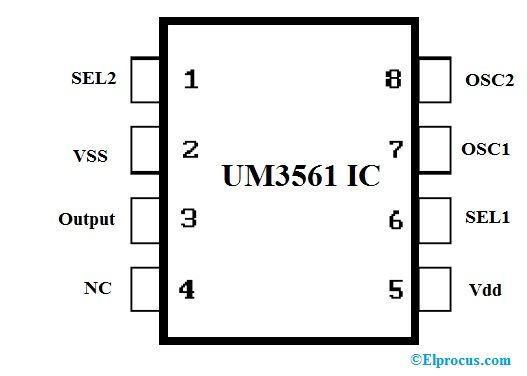
עכשיו בואו ללמוד את פונקציות ה- pinout של IC L293 על ידי התייחסות לתרשים הבא ומההסבר הבא:

סיכה מס '2 היא קלט הבקרה, השולט על סיכת הפלט מס' 3.
באופן דומה, סיכה מס '7 היא קלט הבקרה עבור סיכת הפלט מס' 6.
סיכה מס '1 משמשת להפעלה או השבתה של קבוצות ה- pinouts לעיל. חיובי בסיכה מס '1 שומר על קבוצות pinouts לעיל מופעלות ופעילות, בעוד אספקה שלילית או 0V מבטלת אותן באופן מיידי.
באופן זהה למדי, סיכה מס '15 וסיכה מס' 10 הופכות לכניסות הבקרה עבור יציאות סיכה מס '14 וסיכה מס' 11, ואלה נשארות פעולות רק כל עוד סיכה מס '9 מוחזקת בהיגיון חיובי ומושבת כאשר היגיון 0 וולט הוא מוחל על pinout זה.
כפי שהוסבר לעיל, סיכה מס '3 וסיכה מס' 6 יכולים לשמש כזוגי מוטות טוטם על ידי הזנת אות לוגיקה אנטי פאזה על סיכת הכניסה מספר 7 וסיכה מס '2. משמע, כאשר סיכה מספר 2 מוזנת עם היגיון חיובי, סיכה מס '7 חייבת להיות בהיגיון שלילי ולהיפך.
זה יאפשר ליציאת הפלט מס '6 ולסיכה מס' 3 להפעיל את העומס המחובר בכיוון תואם, ולהפך כאשר אותות לוגיקת הקלט מתהפכים, קוטביות העומס הופכת גם היא והיא תתחיל להסתובב בכיוון ההפוך.
אם רצף זה מוחלף במהירות, העומס פועל בהתאם באופן קדימה ואחורה או באופן משיכת דחיפה.
ניתן לשכפל את הפעולה הנ'ל גם על פני צמד הנהגים האחרים.
ה- Vcc או הכניסות החיוביות לאספקה עבור ה- IC מוגדרים באופן עצמאי לשתי כניסות אספקה שונות.
סיכה מס '16, (Vcc1) משמשת להפעלת פינאוטים אפשריים ולהפעלת שלבי לוגיקה פנימיים אחרים של ה- IC, וזה יכול להיות מסופק עם קלט של 5V, אם כי המגבלה המקסימלית היא 36V
סיכה מס '8, (Vcc2) משמשת במיוחד להפעלת המנועים, וניתן להזין את זה בכל דבר שבין 4.5V ל 36V
מפרט חשמלי של IC L293
IC L293 מתוכנן לפעול עם אספקה כלשהי שבין 4.5V ל 36V, עם מפרט טיפול זרם מרבי של לא יותר מ 1 אמפר (2 אמפר במצב דופק, מקסימום 5ms)
לכן כל עומס במפרט הנ'ל יכול להיות מופעל על פני התפוקות הנדונות של IC L293.
אין לחרוג מלוגיקת בקרת הקלט מעל 7 וולט, בין אם כאספקה רציפה או אספקת PWM.
שימוש ב- L293 IC ליישום בקרת מנוע
בואו ונלמד כיצד ליישם מעגלי בקרי מנוע באמצעות IC L293 באמצעות מצבי פעולה שונים, ובאמצעות שימוש בכ -4 מנועים עם מתקן בקרה נפרד.
“מהו מד אוהם ”
בפוסט הקודם שלנו למדנו את הפרטים המדויקים והתפקודיים של ה- IC L293, כאן אנו לומדים כיצד ניתן להשתמש באותו IC לשליטה במנועים באמצעות מצבים ותצורות ספציפיות.
מצבי בקרה
ניתן להשתמש ב- IC L293 לבקרת מנועים במצבים הבאים:
1) 4 מנועים באמצעות כניסות PWM עצמאיות.
2) 2 מנועים במצב מוט דו כיווני או טוטם עם בקרת מהירות באמצעות PWM
3) מנוע BLDC דו-פאזי אחד המשתמש בכניסת PWM
התמונה למטה מראה כיצד ניתן להשתמש ב- IC לבקרת מנועים עם בקרות עצמאיות, וכיצד ניתן להשתמש במנוע יחיד להשגת שליטה דו כיוונית :

בצד השמאלי של ה- IC נראה מנוע שמוגדר לעבוד במצב דו כיווני. כדי להבטיח שהמנוע מסתובב באחד מהכיוונים שנבחרו, יש להחיל סיכה מספר 1 וסיכה מס '7 עם כניסה 5V DC נגד פאזה. כדי לשנות את כיוון סיבוב המנוע, ניתן לשנות את קוטביות 5V זו על פני פינות הקלט שהוזכרו.
יש להחזיק את סיכה מספר 1 בגובה ההיגיון על מנת לשמור על פעולת המנוע וה- IC תפקוד, הגיון 0 כאן יפסיק את המנוע באופן מיידי.
האספקה במוצבי כניסה לבקרה יכולה להיות בצורה של PWM, זה יכול לשמש בנוסף ל שליטה על מהירות המנוע מ- 0 למקסימום פשוט על ידי שינוי מחזור החובה של PWM.
הצד הימני של ה- IC מתאר סידור שבו כמה מנועים נשלטים באופן עצמאי באמצעות כניסות PWM עצמאיות בסיכה מס '15 ובסיכה מס' 10.
יש להחזיק סיכה מס '9 בהיגיון גבוה על מנת לשמור על תפקוד המנוע וה- IC. אפס הגיוני בפינאוט זה יעצור ויבטל באופן מיידי את תפקוד המנועים המחוברים.
מכיוון שהצד השמאלי והצד הימני של ה- IC זהים לפרטי התפקוד שלהם, ניתן להחליף את הסידור המוצג של המנועים על פני פינות הספינה הרלוונטיות כדי להשיג תפקוד זהה כמוסבר לעיל, כלומר ניתן לחבר שני מנועים בודדים ב הצד השמאלי של ה- IC בדיוק כפי שיושם בצד הימני של ה- IC בתרשים.
באופן דומה ניתן לשלב את המערכת הדו-כיוונית בצד ימין של פינות ה- IC בדיוק כפי שהושגו בצד שמאל של ה- IC בתרשים המוצג לעיל.
הדוגמה לעיל מראה כיצד ניתן להשתמש ב- IC L293 לבקרת 4 מנועים בנפרד, או 2 מנועים במצב דו-כיווני, וכיצד ניתן לשלוט על המהירות גם באמצעות הזנת PWM בפינאטי הכניסה הרלוונטיים של ה- IC.
באמצעות L293 לשליטה במנוע BLDC דו-פאזי

בתמונה שלעיל אנו יכולים לראות כיצד ניתן להגדיר את ה- IC L293 לבקרת מנוע BLDC דו-פאזי באמצעות הפינים המצויינים ובאמצעות כמה כניסות בקרה המוצגות כפקד A ובקרה B.
ניתן לראות מנוע דו-פאזי יחיד המחובר על פני יציאות ה- IC, בעוד שהכניסות מחוברות עם סט של שערים שאינם הופכים לאחראים ליצירת לוגיקת הכניסה האנטי פאזית הנדרשת לבקרת המנוע.
נקודות בקרה A ובקרה B עשויות להיות נתונות להיגיון מתחלף המאפשר לסובב נכון את המנוע הדו-פאזי.
הקוטביות של ההיגיון המתחלף קובעת את כיוון הסיבוב של המנוע.
להשגת בקרת מהירות ליניארית על המנוע, ניתן ליישם צורת PWM של לוגיקה על פני כניסות הבקרה A ובקרת B ומעגל החובה שלה יכול להיות מגוון להשגת בקרת המהירות הרצויה במנוע המחובר.
אם יש לך ספקות נוספים בנוגע למפרט הטכני, או גליון הנתונים או פרטי ה- pinout של ה- IC, אתה תמיד יכול להרגיש חופשי להגיב למטה לתשובות מיידיות.
קודם: מדחום אלחוטי באמצעות קישור RF 433 מגה-הרץ באמצעות ארדואינו הבא: מעגל ESC אוניברסלי עבור מנועי BLDC ואלטרנטור