ההודעה מסבירה מעגל נהג מנוע מנוהל בקו לייזר פשוט, הפועל על ידי תגובה לקו לייזר אופקי מדויק, שנוצר ממכשיר קו לייזר ברמה, ומתאים באופן אוטומטי את יישור הכלי המחובר או עבודת העבודה בשלמות ובדיוק קיצוניים.
מה זה לייזר קו
ציוד לייזר הקו מהווה תחליף אלקטרוני עם דיוק גבוה של הנגרים מיושר מפלס.
מכשיר הלייזר בקו הוא למעשה ציוד מתקדם לפליטת לייזר אשר יכול ליצור 360 ° קו לייזר אופקי מואר עם דיוק גבוה, למתן אסמכתא כיול לכל עבודות ההנדסה התעשייתיות או הקונסטרוקציות, כך שהתוצאה הסופית של העבודה תהיה ישרה לחלוטין ומיישרת ללא מעט טעות.
המבקש התבקש על ידי אחד הקוראים המסורים בבלוג זה, מר רפאל.
את הדיונים המפורטים בנוגע להליך העבודה של המנוע המפוקח בלייזר ניתן ללמוד מהפסקאות הבאות:
מטרת עיצוב
אדון. רפאל: אני מאוד חדש בזה. ביצעתי מחקר בשבועות האחרונים ולא מצאתי בדיוק את מה שאני צריך.
אודה על כל עזרה. אני מצרף תמונה של הרעיון שלי. אני רוצה לשלוט בשני מנועי DC 12 וולט עם רמת לייזר.
רמת לייזר הקו תסמן את המקלטים.

אז אות זה יצטרך לשלוט בכיוון של מנוע 12 וולט DC. המנוע מסובב את מוט ההברגה קדימה ואחורה כדי להתאים את גובה הכלי.
ממה שגיליתי, יהיו כמה פוטודיודות מחוברות במקביל, אחת קבוצה לזיהוי הלייזר מעל לרמה האפסית והשנייה מתחת לרמה זו. רמת האפס היא רק סוג של הפסקה בין הפוטודיודות כדי למנוע מהמערכת להתעורר. חיישן לייזר ללא תצוגה. נתתי רק תמונה ציורית.
אני צריך מעגל גשר H, אך כל מה שנמצא על ידי ישמש למערכת ארדואינו. במידת הצורך אוכל לרכוש גשר מוכן במחיר סביר של עד 30 דולר
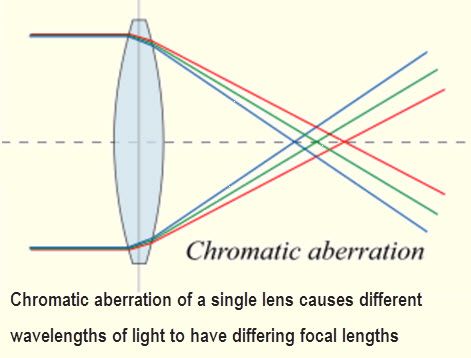
באופן אידיאלי זה יעבוד עם לייזרים אדומים וירוקים כאחד, אך אורכי הגל שונים כל כך, עד כי אני בספק אם ניתן לעשות זאת והוא לא יעבוד על כל ספקטרום האור.
בתחילה, ברצוני לקבוע את רמת הקורה הזו המחוברת למנועים באמצעות הכפתורים למעלה. אשמח אם המנוע השני יתיישר עם הג'ירוסקופ בעת הגדרתו, אך ללא הארדואינו זה עלול להיות קשה מאוד.
אני מרגיש שמה שאני מנסה לעשות הוא כל כך פשוט שאני יכול לברוח בלי להשתמש בארדואינו. ואני מתעקש על אנלוגי, בגלל התנאים הקשים באתר בנייה ונראה לי שככל שיש יותר אלקטרוניקה, המכשיר לא אמין יותר.
זה יעבוד רק בבית, ומרחק הלייזר הוא מקסימום 10 מטר. המנוע שמצאתי בהתחלה הוא בעל צריכת זרם גדולה של 200mA מקסימום 2.19 A, אך גם מומנט גדול.
כוח 18 V DC מסוללת Makita.
תודה מראש על כל הצעה.
ברכות מפולין
רפאל
הִתנוֹעֲעוּת : יש לי בלבול בנוגע לעבודה של פירים מוטוריים. הבורג המושחל בשני המנועים ידחוף את הכלי, אך הוא אינו יכול למשוך אותו לאחור? איך זה מסתדר?
האם ניתן ליישם אותו במנוע יחיד?
אדון. רפאל: יישור פילוס תחתון יהיה אולי 70 ס'מ, רק עבור חדרים קטנים, למשל. שירותים כדי שתוכל להיכנס דרך דלת.
מכונה ללא כונן, מושכת ביד, רק יישור פילוס. בסרטון, שני האובייקטים הצהובים על התורנים הם גלאי לייזר המחוברים בצורה נוקשה ליישרים.
הלייזר עומד איפשהו רחוק יותר והוא מייצר קו אופקי.
המנועים היו מחוברים לעגלה והבורג המושחל ליישור יישור עם גלאי לייזר. חייבים להיות שני מנועים כדי ליישר את שני הצדדים, אבל זו תמונת מראה.
החלק הנפוץ היחיד יהיה גשר H דו-ערוצי כאילו אני עושה את זה ממודול מוכן ואולי מג'ירוסקופ, אבל זה חלום :).
חשוב שיהיה כפתור לסיבובי מנועים ימינה ושמאלה.
ההליך הוא זה. אני תולה את הלייזר למשל 2 מ 'מעל מפלס הרצפה המיועד. אני מודד 2 מטרים מקרן הלייזר לקצה התחתון של היישרים.
אני מווסת את גובה הלחיצה על כפתורי המתגים מימין לשמאל כך שיהיה שווה ל -2 מטר לקצה התחתון של היישרים. הנחתי את הגלאים על התורנים כך שקרן הלייזר תהיה ברמת אפס בין קטעי הפוטודיודה. והשאר יעשה את עצמו
בקובץ המצורף שמתי ציור של פעולת הגלאי.
רפאל
עיצוב מעגלים

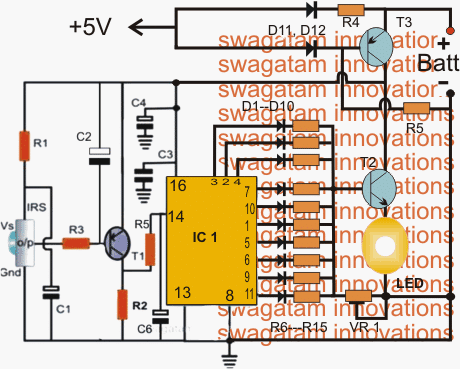
אם מסתכלים על האיור לעיל, יידרשו שני שלבי מעגל זהים כאלו לאיתור ולתיקון הכלי הנשלט על ידי מנועים הקשורים לדיוק ישר הלייזר.
שני השלבים הזהים הם תמונות מראה זה של זה כמוצג להלן:

המעגלים פשוטים למדי. זה עובד עם משווה חלונות שמבטיח שמנועי הכונן אינם פעילים כל עוד צמד ה- LDR נחשפים עם בהירות קו הלייזר הזהה.
לאחר מכן נוצר חצי מתח אספקה אחד בכניסה הלא-הפוכה של A1 ולכניסה ההפוכה של A2.
ברגע שמתגלה סטיה בקו הלייזר (מה שיכול לקרות אם הכלי הנשלט על המנוע אינו מיושר ישר), הבהירות המשפיעת על LDRs R1 ו- R2 משתנה.
במצב זה, מתח הכניסה למשווה החלונות מתרחק ממחצית מתח האספקה. מצב זה גורם לפלט המשווה לפקד על רשת גשר המנוע להזיז את המנוע בכיוון השעון או נגד כיוון השעון.
טרנזיסטורים T1. . . T4 מוגדרים כמו רשת גשרים כדי לאפשר כניסה של המנוע פנימה כיוונים קדימה ואחורה תלוי בתאורת LDR או בזווית סטיית קו הלייזר.
דיודות D1. . . D4 ממוקמים לבטל שיאי מתח שנוצרו בזמן שהמנוע פועל ופועל. תפקידם של פוטנציומטרים מוגדרים מראש P1 ו- P2 הוא להקל על התאמות היישור.
אלה מכווננים בכדי להבטיח שהמנוע יהיה מכובה לחלוטין ואינו פעיל כל עוד זוג ה- LDR הרלוונטי נחשף לאותה בהירות אור לייזר בדיוק.
נניח למשל, בגלל יישור שגוי של הכלי הנשלט על המנוע, הטיה של קו הלייזר גורמת לאור להפחתה ב- LDR R2 מאשר ל- LDR R1. זה יביא לכך שהמתח בנקודה A יעלה מעל מחצית מתח האספקה.
במצב זה, תפוקת מגבר ה- A1 הופכת גבוהה, מה שמאלץ את הטרנזיסטורים T1 ו- T4 לפעול. זה בתורו גורם למנוע להסתובב בכיוון הרלוונטי. פעולה זו מעבירה את הכלי המחובר באופן אוטומטי בקו ישר עד שדיוק היישור האופקי שלו עולה בקנה אחד עם דיוק קו הלייזר.
לעומת זאת, אם נניח שהכלי מוטה בכיוון ההפוך כך שתאורת ה- LDR תהיה הפוכה מהדובר לעיל, גורמת למתח בנקודה A לרדת מתחת למחצית מתח האספקה. מצב זה גורם למגבר פלט A2 למגבר להגיע גבוה כך ש- T3 ו- T2 יפעלו.
כתוצאה מכך המנוע פועל כעת בכיוון ההפוך, בניסיון לתקן את יישור הכלי בכיוון הרלוונטי עד שהוא הופך ישר לחלוטין במקביל לדיוק האופקי של קו הלייזר.
כפתור למעלה / למטה
את כפתורי העלה-מטה להגדרה ראשונית של גובה המפלס ניתן ליישם בפשטות על ידי מתגי כפתור חיווט במקביל לכל אחד מ- LDR.
התקנת LDR
כדי לקבל את התגובה הנכונה מה- LDR, יש להתקין את הזוגות הימניים השמאלית בתוך צינור כמו מארז כך שהם מסוגלים 'לראות' רק את תאורת הלייזר ולא שום אור סביבתי אחר.
ניתן לראות את הרעיון בתמונה הבאה:

כאן אנו יכולים לראות כי ה- LDR ממוקמים קרוב מאוד זה לזה, מה שמבטיח שכאשר קו הלייזר נמצא במרכז המדויק, חלק כלשהו משני זוגות ה- LDR מואר על ידי אור הלייזר באופן אחיד.
החלק הקדמי של מארז ה- LDR יכול להיות מכוסה בעדשה מפוזרת, כך שתאורת הלייזר יכולה להיות מפוזרת פנימה על פני ה- LDR בהתאמה.
קודם: מעגל אזעקה פשוט נגד גניבה להגנה על פריטים בעלי ערך הבא: מעגל הבוחן האוניברסלי BJT, JFET, MOSFET