מעגל מהפך גל סינוס טהור 1000 וואט פשוט יחסית מוסבר כאן באמצעות מגבר אות ושנאי הספק.
כפי שניתן לראות בתרשים הראשון שלהלן, התצורה היא מוספט פשוט המבוסס על הגברת זרם ב +/- 60 וולט כך שהשנאי המחובר תואם לייצר פלט 1kva הנדרש.
מבצע מעגל
Q1, Q2 מהווה את שלב המגבר הדיפרנציאלי הראשוני אשר מעלה כראוי את אות הסינוס 1vpp בקלטו לרמה שהופכת מתאימה ליזום שלב הנהג המורכב מ- Q3, Q4, Q5.
שלב זה מעלה עוד יותר את המתח כך שיהיה מספיק להנעת המוספטים.
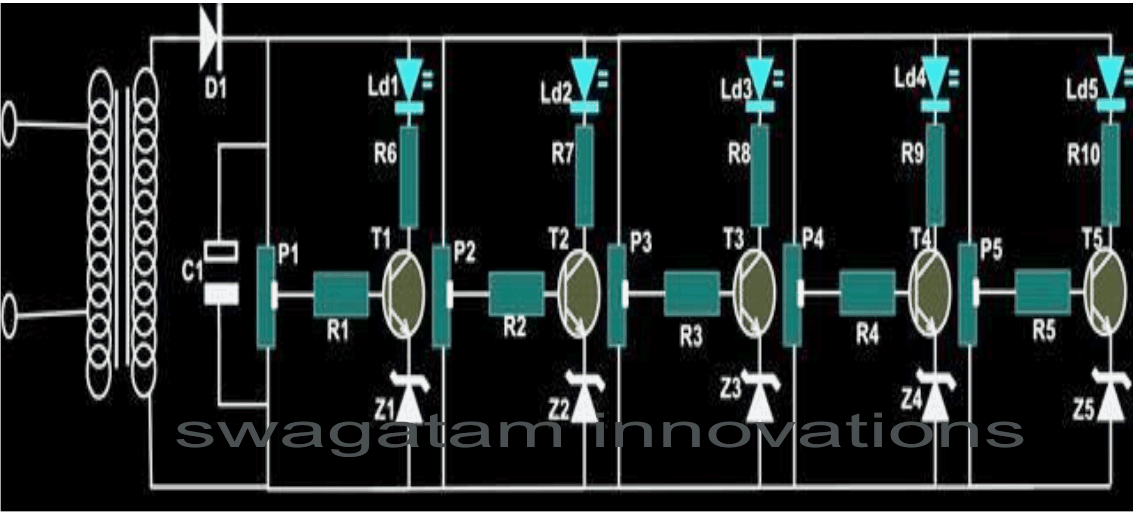
המוספטים נוצרים גם בפורמט משיכת דחיפה, אשר מדשדש ביעילות את כל 60 הוולט על פני פיתולי השנאי 50 פעמים בשנייה כך שפלט השנאי מייצר את הספירה המיועדת של 1000 וואט ברמת הרשת.
כל זוג אחראי על טיפול של 100 וואט תפוקה, יחד כל 10 הזוגות משליכים 1000 וואט לשנאי.
לרכישת תפוקת גל סינוס טהורה המיועדת, נדרש קלט סינוס מתאים המתמלא בעזרת מעגל מחולל גלי סינוס פשוט.
הוא מורכב מכמה אופמים ומספר חלקים פסיביים אחרים. יש להפעיל אותו במתחים שבין 5 ל -12. מתח זה צריך להיות נגזר כראוי מאחת הסוללות שמשולבות להפעלת מעגל המהפך.
המהפך מונע במתח של +/- 60 וולט שמסתכם ב -120 וולט DC.
רמת מתח עצומה זו מתקבלת על ידי הצבת 10 נק '. של 12 סוללות וולט בסדרה.

מעגל מחוללי הגלישה הסינוסיים
בתרשים הבא ניתן לראות מעגל מחולל גלי סינוס פשוט אשר עשוי לשמש להנעת מעגל המהפך לעיל, אולם מכיוון שהפלט מגנרטור זה הוא אקספוננציאלי מטבעו, עלול לגרום לחימום רב של המוספטים.
אפשרות טובה יותר תהיה לשלב מעגל מבוסס PWM שיספק למעגל הנ'ל פולסים מסוג PWM מותאמים כראוי שווה אות סינוס סטנדרטי.
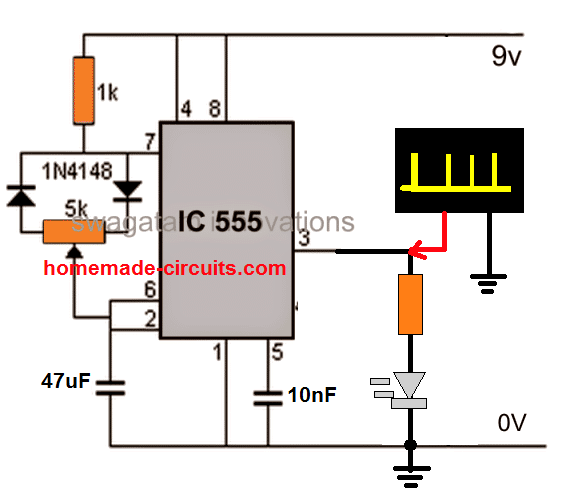
מעגל ה- PWM המשתמש ב- IC555 הוזכר גם בתרשים הבא, אשר עשוי לשמש להפעלת מעגל המהפך של מעל 1000 וואט.


רשימת חלקים למעגל מחולל הסינוס
כל הנגדים הם 1/8 וואט, 1%, MFR
R1 = 14K3 (12K1 עבור 60Hz),
R2, R3, R4, R7, R8 = 1K,
R5, R6 = 2K2 (1K9 עבור 60Hz),
R9 = 20K
C1, C2 = 1µF, TANT.
C3 = 2 µF, TANT (שני 1 µF במקביל)
C4, C6, C7 = 2µ2 / 25V,
C5 = 100 מיקרו / 50 וולט,
C8 = 22µF / 25V
A1, A2 = TL 072
רשימת חלקים עבור מהפך
Q1, Q2 = BC556
ש 3 = BD140
Q4, Q5 = BD139
כל המוספטים בערוץ N הם = K1058
כל המוספטים בערוץ P הם = J162
שנאי = 0-60 וולט / 1000 וואט / פלט 110/220 וולט 50 הרץ / 60 הרץ
מהפך המוצע של 1 kva הנדון בסעיפים לעיל יכול להתייעל ולהפחית את גודלו כמפורט בתכנון הבא:
כיצד לחבר סוללות
התרשים מציג גם את שיטת חיבור הסוללה ואת חיבורי האספקה עבור גל הסינוס או שלבי המתנד PWM.
כאן נעשה שימוש רק בארבעה מוספטים שיכולים להיות IRF4905 עבור ערוץ p ו- IRF2907 עבור ערוץ n.

השלם תכנון מעגל מהפך של 1 kva עם מתנד סינוס 50 הרץ

בסעיף לעיל למדנו תכנון גשר מלא שבו מעורבות שתי סוללות להשגת תפוקת 1kva הנדרשת. עכשיו בואו נבדוק כיצד ניתן לבנות עיצוב גשר מלא באמצעות מוספט 4 ערוצים N ובאמצעות סוללה אחת.
הסעיף הבא מראה כיצד ניתן לבנות מעגל מהפך 1 KVA מלא בגשר מלא, מבלי לשלב רשתות נהג או שבבים מסובכים בצד גבוה.
שימוש בארדואינו
את המעגל המהפך של מהפך סינוס 1kva שהוסבר לעיל ניתן להניע גם דרך ארדואינו להשגת כמעט תפוקת סינוס מושלמת.
את תרשים המעגלים המלא מבוסס Arduino ניתן לראות להלן:

קוד התוכנית מופיע להלן:
//code modified for improvement from http://forum.arduino.cc/index.php?topic=8563.0
//connect pin 9 -> 10k Ohm + (series with)100nF ceramic cap -> GND, tap the sinewave signal from the point at between the resistor and cap.
float wav1[3]//0 frequency, 1 unscaled amplitude, 2 is final amplitude
int average
const int Pin = 9
float time
float percentage
float templitude
float offset = 2.5 // default value 2.5 volt as operating range voltage is 0~5V
float minOutputScale = 0.0
float maxOutputScale = 5.0
const int resolution = 1 //this determines the update speed. A lower number means a higher refresh rate.
const float pi = 3.14159
void setup()
wav1[0] = 50 //frequency of the sine wave
wav1[1] = 2.5 // 0V - 2.5V amplitude (Max amplitude + offset) value must not exceed the 'maxOutputScale'
TCCR1B = TCCR1B & 0b11111000
void loop() {
time = micros()% 1000000
percentage = time / 1000000
templitude = sin(((percentage) * wav1[0]) * 2 * pi)
wav1[2] = (templitude * wav1[1]) + offset //shift the origin of sinewave with offset.
average = mapf(wav1[2],minOutputScale,maxOutputScale,0,255)
analogWrite(9, average)//set output 'voltage'
delayMicroseconds(resolution)//this is to give the micro time to set the 'voltage'
}
// function to map float number with integer scale - courtesy of other developers.
long mapf(float x, float in_min, float in_max, long out_min, long out_max)
{
return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min
}
קונספט המהפך לגשר מלא
נהיגה של רשת מוספטים של גשר מלא עם 4 מוספטים של ערוץ N היא אף פעם לא קלה, אלא היא דורשת מעגלים מורכבים למדי הכוללים רשתות נהגים מורכבות בצד גבוה.
אם תלמד את המעגל הבא שפותח על ידי, תגלה שבכל זאת זה לא כל כך קשה לתכנן רשתות כאלה וניתן לעשות זאת גם עם רכיבים רגילים.
אנו נלמד את הרעיון בעזרת תרשים המעגל המוצג שהוא בצורת מעגל מהפך 1 kva שונה המעסיק 4 מוספטים של ערוץ N.
כפי שכולנו יודעים, כאשר 4 מוספטים של ערוץ N מעורבים ב- רשת H-bridge , רשת bootstrapping הופכת להיות הכרחית לנהיגה של הצד הגבוה או את שני המוספטים העליונים שניקוזיהם מחוברים לצד הגבוה או לסוללה (+) או לחיוב של האספקה הנתונה.
בתכנון המוצע, רשת האתחול נוצרת בעזרת שישה שערים NOT וכמה רכיבים פסיביים אחרים.
תפוקת השערים המוגדרים כמאגרים מייצרת מתח כפול מתחום האספקה, כלומר אם האספקה היא 12 וולט, יציאות השער NOT מייצרות סביב 22 וולט.
מתח מוגבר זה מוחל על שערי המוספטים בצד הגבוה באמצעות פינות פולט של שני טרנזיסטורי NPN בהתאמה.
מכיוון שיש להחליף טרנזיסטורים אלה באופן שמוספלים מנוגדים באלכסון מתנהלים בכל פעם ואילו המוספים המזווגים באלכסון בשתי זרועות הגשר מתנהלים לסירוגין.
פונקציה זו מטופלת ביעילות על ידי הגנרטור הגבוה פלט רציף IC 4017, הנקרא טכנית ג 'ונסון לחלק עם 10 נגד / מחלק IC.
רשת Bootstrapping
תדירות הנהיגה עבור ה- IC הנ'ל נגזרת מרשת האתחול עצמה רק כדי להימנע מהצורך בשלב מתנד חיצוני.
יש לכוונן את תדירות רשת האתחול כך שתדר הפלט של השנאי יעשה אופטימיזציה למידה הנדרשת של 50 או 60 הרץ, בהתאם למפרט הנדרש.
תוך כדי רצף, יציאות ה- IC 4017 מפעילות את המוספטים המחוברים ומפיקות כראוי את אפקט הדחיפה-משיכה הנדרש על סליל השנאי המחובר המפעיל את תפקוד המהפך.
הטרנזיסטור PNP שאליו ניתן לחבר את הטרנזיסטורים של ה- NPN מוודא שקיבולת השער של המוספטים מתפרקת ביעילות במהלך הפעולה המאפשרת תפקוד יעיל של המערכת כולה.
ניתן לשנות ולשנות את חיבורי ה- pinout למוספטים בהתאם להעדפות האישיות, הדבר עשוי גם לדרוש מעורבות של חיבור ה- pin 15 לאיפוס.


תמונות צורת גל
העיצוב שלעיל נבדק ואומת על ידי מר רובין פיטר, אחד התחביבים והתורמים הנלהבים לבלוג זה, ותמונות צורת הגל הבאות תועדו על ידו במהלך תהליך הבדיקה.






קודם: מעגל UPS ללא שנאי למחשבים (מעבד) הבא: מעגל הגנת סוללה חלשה ועומס יתר עבור ממירים