ההודעה מפרטת את השיטות השונות לקביעת תצורה של מעגל תיקון מקדם הספק או מעגל PFC בתכנון SMPS, ומסבירה את האפשרויות המומלצות ביותר לטופולוגיות אלה, כך שהוא עומד בהנחיות ההגבלה המודרניות של PFC.
תכנון מעגלי אספקת חשמל יעילים מעולם לא היה קל, אולם עם הזמן החוקרים הצליחו לפתור את רוב הנושאים הנוגעים לכך, ובדיוק באותם קווים גם אופטימיזציה של עיצובי ה- SMPS המודרניים עם התוצאות הטובות ביותר האפשריות, בזכות התקנים הרגולטוריים המתהווים אשר מילאו תפקיד חשוב ביישום פרמטרים איכותיים מחמירים יותר עבור יחידות אספקת החשמל המודרניות.
הנחיות PFC
המגבלות על איכות אספקת החשמל המודרניות נקבעות בצורה אגרסיבית למדי, ביחד על ידי מאמצים של היצרנים, הספקים וגופים ממשלתיים מודאגים אחרים.
בין שלל הפרמטרים האיכותיים שנקבעו בעיצוב אספקת החשמל המודרנית, תיקון מקדם הספק (PFC) שהוא למעשה בצורה של ביטול הרמוני הוכרז כחובה על פי כללי חברת החשמל 61000-3-2.
עקב כך נאלצים מעצבים להתמודד עם אתגרים קשים יותר בתכנון שלבי תיקון גורמי כוח בתכנון אספקת החשמל שלהם על מנת לעמוד בחוקים המודרניים המחמירים הללו, ועם ספקי כוח נהיים יותר ויותר איומים עם המפרט והטווח היישומי שלה, ובונים מעגלי PFC מתאימים. לא הופך קל יותר עבור היצרנים הרבים בזירה.
המדריכים המוצגים מוקדשים במיוחד לכל אותם עמותות ואנשי מקצוע העוסקים בייצור או תכנון SMPS של flyback על מנת להקל עליהם את העיצובים והחישובים האידיאליים ביותר של PFC בהתאם לדרישות האישיות שלהם.
הדיונים הכלולים בהדרכות אלה יעזרו לך לתכנן מעגלי PFC אפילו ליחידות גדולות משמעותית בטווח של עד 400 וואט, 0.75 אמפר.
הקוראים יקבלו גם את ההזדמנות ללמוד על בחירת ממירים מבודדים חד-שלבים הכוללים גם מנהלי התקני LED. הדרכה לעיצוב צעד אחר צעד והוראות לצד השוואות ברמת המערכת, המעצבים הרבים המעורבים באופן פעיל בתחום האלקטרוניקה החשמלית יוארו להמשיך בגישה האופטימלית ביותר לצרכי היישום הספציפיים שלהם
מטרת תיקון פקטור כוח
אופטימיזציה של מעגל תיקון מקדמי הספק בתוך יחידות ה- SMPS המודרניות (אספקת חשמל במצב מתג) יכולה להתפתח בעבר הקרוב בשל הופעתם של מספר מעגלים משולבים רלוונטיים מתקדמים (ICs), שאפשרו לקבוע עיצובי PFC שונים בעלי ספציפיים דרכי פעולה ועם יכולת טיפול אתגרית פרטנית.
עם הגידול במגוון הטופולוגיות של SMPS, המורכבות בתכנון ויישום PFC החמירה גם בימינו.
במדריך הראשון נלמד לגבי הפרטים התפעוליים של העיצוב המועדפים בעיקר על ידי כל אנשי המקצוע את התיקונים.
ביסודו של דבר, תיקון מקדם הספק מסייע במיטוב זרם הקלט בתוך ספקי כוח לא מקוונים כך שאלו יוכלו לשפר את הכוח האמיתי מכניסת החשמל הזמינה.
בהתאם לדרישה הרגילה, מכשיר חשמלי נתון חייב לחקות את עצמו כעומס בעל התנגדות טהורה, כך שהוא מאפשר לו צריכת חשמל תגובית אפסית.
מצב זה מביא ליצירת זרמים הרמוניים קלטיים כמעט אפסיים, במילים אחרות הוא מאפשר לזרם הנצרך להיות בקו אחד לחלוטין עם מתח אספקת הקלט שהוא בדרך כלל בצורת גל סינוס.
הישג זה מאפשר למכשיר לצרוך את 'הכוח האמיתי' מהחשמל ברמות האופטימליות והיעילות ביותר, מה שמביא בתורו למזער בזבוז חשמל ולהגביר את יעילותו.
שימוש יעיל זה בחשמל לא רק עוזר למכשיר להציג את עצמו בצורה היעילה ביותר, אלא גם עבור חברות השירות וציוד ההון המעורב בתהליך.
התכונה שלעיל מאפשרת לקווי החשמל להיות חופשיים מההרמוניות ומההפרעה הנובעת מהתקנים ברשת.
מלבד היתרונות שהוזכרו לעיל, כולל PFC ביחידות אספקת החשמל המודרניות נועד גם לעמידה בדרישות הרגולציה שנקבעו באירופה וביפן עם IEC61000-3-2 אשר כל הציוד החשמלי צריך להיות כשיר.
התנאי שהוזכר לעיל הוסדר עבור מרבית המכשירים האלקטרוניים אשר עשויים להיות מדורגים מעל 75 וואט תחת תקני ציוד Class D או שהם גבוהים אף יותר, תוך ציון המשרעת הגבוהה ביותר של ההרמוניות בתדר הקו הנעות עד להרמוניה 39.
מלבד סטנדרטים אלה PFC משמשת גם להבטחת יעילות אחרות כגון Energy Star 5.0 החיונית למחשבים ו- Energy Star 2.0 למערכות ספקי כוח ומכשירי טלוויזיה מאז 2008.
הגדרת כוח פקטור
ניתן להגדיר תיקון PFC או פקטור כוח כיחס הכוח האמיתי לעוצמה לכאורה, ובא לידי ביטוי:
PF = כוח אמיתי / כוח לכאורה, כאשר הכוח האמיתי בא לידי ביטוי ב
וואטס, בעוד כוח לכאורה בא לידי ביטוי ב- VA.
בביטוי זה הכוח האמיתי נקבע כממוצע של התוצר הרגעי של הזרם והמתח על פני שלב או מחזור, בעוד שהספק לכאורה נחשב לערך RMS של הזרם כפול המתח.
זה מצביע על כך שבכל פעם שמקבילי זרם ומתח הם סינוסואידיים ובשלב זה עם זה, גורם הכוח המתקבל הוא 1.0.
עם זאת, במצב בו פרמטרי הזרם, המתח הם סינוסיים אך אינם בשלב, מוליד גורם הספק שהוא קוסינוס של זווית הפאזה.
תנאי מקדם ההספק המתוארים לעיל חלים במקרים בהם המתח והזרם שניהם גלי סינוס טהורים, יחד עם מצב בו העומס הנלווה מורכב מרכיבים התנגדותיים, אינדוקטיביים וקיבוליים אשר עשויים להיות כולם לא ליניאריים באופיים, כי אינו מסתגל עם פרמטרי הזרם והמתח.
טופולוגיות SMPS מכניסות בדרך כלל עכבה לא ליניארית לקו הרשת בשל הטבע המוסבר לעיל במעגלים שלה.
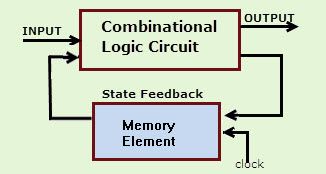
איך עובד SMPS
מעגל SMPS כולל בעצם שלב מיישר בכניסה שיכול להיות חצי גל או מיישר גל מלא וקבל פילטר משלים להחזקת המתח המתוקן עליו לרמת השיא של גל הסינוס של אספקת הקלט עד למועד השיא הבא. גל סינוס מופיע וחוזר על מחזור הטעינה של הקבל הזה, וכתוצאה מכך מתח קבוע לשיא הנדרש על פניו.
תהליך זה של טעינת הקבל בכל מחזור שיא של זרם חילופין דורש כי על הקלט להיות מצויד בזרם מספיק למימוש צריכת העומס של ה- SMPS, בין מרווחי שיא אלה.
המחזור מיושם על ידי השלכת זרם גדול לקבל במהירות, המופעל על העומס באמצעות פריקה עד להגעת מחזור השיא הבא.
עבור תבנית טעינה ופריקה לא אחידה זו, מומלץ כי זרם הדופק מהקבל ידורג ב 15% יותר מהדרישה הממוצעת של העומס.

אנו יכולים לראות באיור לעיל שלמרות כמות העיוותים המשמעותית המתח והפרמטרים הנוכחיים הם ככל הנראה בשלב זה עם זה.
עם זאת, אם אנו מיישמים את המונח 'זווית פאזה קוסינוס' על האמור לעיל יגרור מסקנה שגויה לגבי אספקת החשמל בעלת מקדם הספק של 1.0
צורות הגל העליונות והתחתונות מציינות את כמות התוכן ההרמוני של הזרם.
כאן מצוין 'התוכן ההרמוני הבסיסי' בהשוואה למשרעת של 100%, בעוד שההרמוניות הגבוהות יותר מוצגות כאחוזים המשלימים של המשרעת הבסיסית.
אולם מכיוון שהכוח האמיתי נקבע רק על ידי המרכיב הבסיסי, בעוד שההרמוניות המשלימות האחרות מייצגות רק את הכוח הנראה לעין, גורם הכוח בפועל עשוי להיות נמוך מ- 1.0.
אנו מכנים סטייה זו במונח גורם עיוות האחראי ביסודו להולדת גורם כוח שאינו אחדות ביחידות SMPS.
ביטוי לכוח אמיתי ולכאורה
ביטוי כללי המתייחס לקשר בין הכוח האמיתי לכוח לכאורה יכול להינתן באופן הבא:

כאשר cosΦ יוצר את גורם התזוזה העולה מזווית הפאזה Φ בין צורות הגל הנוכחיות / מתח ו- cosΦ מסמל את גורם העיוות.

בהתייחס לתרשים להלן, אנו יכולים להיות עדים למצב המראה תיקון גורם הספק מושלם.

אנו יכולים לראות שכאן צורת הגל הנוכחית משכפל באופן אידיאלי את צורת הגל המתח שכן שניהם ככל הנראה פועלים בשלב ומסונכרנים זה עם זה.
לכן כאן ניתן להניח כי הרמוניות זרם הקלט הן כמעט אפסיות.
תיקון גורם גורם לעומת הפחתה הרמונית
בהתבוננות באיורים הקודמים ניכר שגורם כוח והרמוניות נמוכות פועלים מסונכרנים זה עם זה.
בדרך כלל תופש כי אם מתוארים מגבלות להרמוניות המתאימות עשוי לסייע בהגבלת זיהום זרם הקלט בקווי החשמל בדרך של ביטול הפרעות זרם המפריעות למכשירים האחרים בסביבה.
לכן בעוד שעיבוד זרם הקלט יכול להיקרא 'תיקון גורמי הספק', גודל המוצא של השכלול חשב כי עיבוד זה מובן כתוכן הרמוני בהתאם להנחיות הבינלאומיות.
עבור טופולוגיות SMPS, זה בדרך כלל אלמנט העקירה שנמצא באחדות בערך, מה שמוליד את היחסים הבאים בין גורם הכוח לעיוות הרמוני.

בביטוי ה- THD מייצג את העיוות ההרמוני הכולל כסכום הריבועי של ההרמוניות המזיקות על התוכן הבסיסי, המבטא את המשקל היחסי של התוכן ההרמוני הקשור בהתייחס למקבילה הבסיסית. המשוואה האחרת משייכת את הנתון המוחלט של THD ו- לא בשיעור האחוז, מבטא ש- THD צריך להיות אפס בעיקרו כדי ליצור PF אחדות.
סוגי תיקון גורמי כוח
מאפיין צורת גל הקלט באיור לעיל מדגים סוג 'פעיל' אופייני של תיקון גורמי הספק למכשיר SMPS המוצג בין תצורת מיישר קלט לקבל מסנן, ובאמצעות מעגל משולב PFC השולט בהליכים יחד עם המעגלים הנלווים להבטיח שזרם הקלט עוקב בצורה מגובשת אחר צורת גל המתח.
סוג זה של עיבוד עשוי להיחשב כסוג ה- PFC הנפוץ ביותר המופעל במעגלי ה- SMPS המודרניים, כפי שניתן לראות באיור להלן.
אחרי שאמרנו זאת, בשום פנים ואופן לא חובה כי רק גרסאות 'אקטיביות' המשתמשות במעגלי IC ובמוליכים למחצה ישמשו עבור ה- PFC המוצע, אך בדרך כלל יתקבל צורה אחרת של עיצוב אשר עשויה להבטיח סכום סביר של PFC מתחת לתקנות שנקבעו.
יש לשים לב שלמעשה משרן יחיד המחליף את מיקומו של המקביל ה'פעיל 'מסוגל לדחות באופן די משביע רצון את ההרמוניות על ידי שליטה על הפסגות ועל ידי פיזור הזרם באופן אחיד מסונכרן עם מתח הכניסה בצורה יעילה למדי.
עיצוב PFC פסיבי
עם זאת צורה זו של בקרת PFC פסיבית עשויה לדרוש משרן ליבת ברזל מגושם באופן משמעותי ולכן ניתן להשתמש בו ליישומים שבהם קומפקטיות איננה דרישה מכרעת. (עמוד 12)
משרן יחיד פסיבי יכול להיראות פיתרון מהיר ל- PFC, אך ליישום של הספק גבוה הגודל יכול להתחיל להיות לא מעניין בגלל המימדים הגדולים שלא ניתנים לביצוע.
בגרף שלמטה אנו יכולים לחזות במאפייני הקלט של שלושה מספרים של 250 וואט גרסאות SMPS למחשב, שכל אחת מהן מייצגת צורת גל נוכחית בגורם סולם שווה ערך.
אנו יכולים לראות בקלות שהתוצאה המתקבלת מ- PFC מבוסס אינדוקציה פסיבית היא בשיא הזרמים הגבוהים ב -33%, לעומת המקבילה של פילטר PFC פעיל.
למרות שזה עשוי להיות מסוגל לעבור את תקני IEC61000-3-2, זה בהחלט לא יהיה בקנה אחד עם כלל הדרישות המחמירות האחרונות של 0.9PF, והוא ייכשל ברמת הקבלה של ה- QC, שנקבעה בהתאם לתקנים חדשים אלה.
דיאגרמת חסימות בסיסית

עקב מגמת השוק האלקטרוני המתמשכת בה אנו יכולים לראות עלויות נחושת בעלייה יחד עם העלייה בתהליך הליבות המגנטיות והכנסת חומרים מוליכים למחצה מודרניים וזולים בהרבה, זה לא יהיה מפתיע אם נבחין בגישה פעילה של PFC נהיה מאוד פופולרי מהמקביל הפסיבי.
ניתן להבחין במגמה זו שתתחזק עוד יותר בעתיד הקרוב, ותציג פתרונות PFC מתקדמים ומשופרים יותר עבור מעצבי ה- SMPS והיצרנים הרבים.

השוואת הרמוניות קו קלט לתקני IEC610003-2
באיור שלהלן אנו יכולים לראות עקבות של שלוש תוצאות SMPS נפרדות של 250 וואט למחשבים אישיים בהתייחס למגבלות IEC6000-3-2. המגבלה שצוינה תקפה לכל הגאדג'טים מסוג D כגון מחשבים אישיים, טלוויזיות ומסכים שלהם.
מגבלת התוכן ההרמוני המוצגת קבועה בהתאם לעוצמת הקלט של המכשירים. עבור מוצרים הקשורים לנורות כגון נורות LED, נורות CFL, בדרך כלל עוקבים אחר מגבלות Class C, אשר זהות זהה למגבלות הספק הקלט שלהן.
מוצרים אלקטרוניים לא קונבנציונליים אחרים מוצאים את מגבלת ה- PFC שלהם מוגדרת ביחס להספק כניסה מינימלי של 600 וואט.
אם אנו מסתכלים על עקבות ה- PFC הפסיביים אנו מוצאים שהוא בקושי תואם את מגבלת ההגבלה שנקבעה, רק מצב מגע ועבור (בהרמוניה מס '3)

ניתוח תכונות PFC פסיביות
באיור הבא אנו יכולים לראות דוגמה קלאסית למעגל PFC פסיבי המיועד לספק כוח מסורתי למחשב. הדבר הבולט כאן הוא חיבור הברז המרכזי של משרן ה- PFC עם מתח הכניסה של קו הכניסה.
בעוד שבמצב הבחירה 220V (מתג פתוח), שני החלקים של המשרן מוחלים כשרשת המיישר עובדת כמו מעגל מיישר גשר מלא.
עם זאת במצב 110 וולט (מתג סגור), רק 50% או מחצית הסליל מנוצלת באמצעות החלק הצדדי השמאלי של הסליל המיושם ואילו קטע המיישר הופך כעת למעגל מכפיל מיישר חצי גל.
מכיוון שבחירת 220 וולט חייבת ליצור סביב 330 וולט לאחר תיקון גל מלא, זה מהווה את קלט האוטובוס עבור ה- SMPS ויש לו אפשרות להשתנות באופן משמעותי בהתאם למתח קו הכניסה.
תרשים מעגלים לדוגמא

למרות שעיצוב PFC פסיבי זה עשוי להיראות די פשוט ומרשים עם ביצועיו, הוא עשוי להציג כמה חסרונות בולטים.
יחד עם האופי המגושם של ה- PFC, שני דברים נוספים המשפיעים על ביצועיו הם ראשונים, הכללת מתג מכני שהופך את המערכת לפגיעה לטעות אנושית אפשרית בזמן הפעלת היחידה, וגם לבעיות הבלאי הנלוות.
שנית, מתח הקו שאינו מתייצב גורם לחוסר יעילות יחסית בחזיתות יעילות העלות ודיוק המרת הספק DC עד DC המקושר לתפוקת PFC.
בקרי מצב הולכה קריטי (CrM)
שלב הבקר הנקרא מצב הולכה קריטי המכונה גם מצב מעבר או בקר הולכה גבולית (BCM) הם תצורות מעגלים אשר ניתן למצוא ביעילות ביישומי אלקטרוניקה תאורה. למרות היותו נטול בעיות עם השימושיות שלו, הבקר האלה הם יקרים יחסית.
התרשים הבא 1-8 מדגים עיצוב מעגלי בקר בקר רגיל.

בדרך כלל בקר PFC של בקר CRM יחזיק בסוג המעגלים המוצג לעיל, שניתן להבין בעזרת הנקודות הבאות:
קלט של שלב מכפיל התייחסות מקבל אות ממדי כראוי מפלט מגבר שגיאה משויך בעל מוט תדר נמוך.
ניתן לראות את הכניסה האחרת של המכפיל באמצעות מתח מהודק DC המיוצא מכניסת קו מתוקן.
לפיכך, הפלט המתקבל מהמכפיל הוא תוצר של DC יחסית מפלט מגבר השגיאה והאות המוזכר בצורה של פולסי סינוס AC מלאים מהכניסה AC.
פלט זה משלב המכפיל ניתן לראות גם בצורה של דופקי גל סינוס גל מלא אך מוקטנת כראוי ביחס לאות השגיאה שהופעל (גורם רווח) משמש כנקודת התייחסות למתח הכניסה.
משרעת האות של מקור זה מותאמת כראוי על מנת ליישם את הכוח הממוצע הממוצע שצוין וכדי להבטיח מתח יציאה מוסדר תקין.
השלב האחראי על עיבוד משרעת הזרם גורם לזרם הזרם בהתאם לצורת גל הפלט מהמכפיל, אולם ניתן לצפות כי משרעת האות הנוכחי של תדר הקו (לאחר החלקה) תהיה מחצית מזו של התייחסות זו משלב המכפיל. .
כאן ניתן להבין את הפעולות לפי מעגלי העיצוב הנוכחיים כדלקמן:

בהתייחס לדיאגרמה לעיל, Vref מייצג את האות החוצה משלב המכפיל, שמועבר נוסף לאחת מהמפתחות של המשווה שהכניסה השנייה שלו מתייחסת לאות צורת הגל הנוכחית.
במתג ההפעלה, הזרם על פני המשרן עולה לאט עד שהאות מעבר לשאנט הגיע לרמת Vref.
זה מאלץ את המשווה לשנות את תפוקתו מ- On ל- OFF וכיבוי החשמל למעגל.
ברגע שזה קורה המתח שהשתדרג בהדרגה על פני המשרן מתחיל לרדת לאט לכיוון אפס וברגע שהוא נוגע באפס, תפוקת האופמפ חוזרת ומופעלת שוב והמחזור ממשיך לחזור.
כפי שמסמן שמו של המאפיין לעיל, דפוס השליטה של המערכת לעולם אינו מאפשר לזרם המשרן לירות מעל הגבול הקבוע מראש על פני מצבי המיתוג הממשיכים והרציפים.
סידור זה עוזר לחזות ולחשב את הקשר בין רמת השיא הממוצעת הנוכחית של התפוקה הנובעת מה- opamp. מכיוון שהתגובה היא בצורה של גלים משולשים, הממוצע של צורת הגל מסמל בדיוק 50% מהפסגות בפועל של צורות הגל המשולש.
זה מרמז שהערך הממוצע המתקבל של האות הנוכחי של גלי המשולש יהיה = זרם משרן x R חוש או פשוט שימו חצי מרמת הייחוס המוגדרת מראש (Vref) של האופמפ.
תדירות הרגולטורים המשתמשים בעקרון הנ'ל תהיה תלויה במתח הקו ובזרם העומס. התדר יכול להיות הרבה יותר גבוה במתח קו גבוה יותר ויכול להשתנות ככל שקלט הקו משתנה.
מצב הולכה קריטי מהודק (FCCrM)
למרות הפופולריות שלו ביישומי בקרת PFC שונים של אספקת חשמל, בקר ה- CrM שהוסבר לעיל כולל כמה חסרונות מובנים.
הפגם העיקרי בסוג זה של בקרת PFC פעילה הוא חוסר היציבות בתדירות ביחס לתנאי קו ועומס, שמראה עלייה בתדירות עם עומסים קלים יותר ומתחי קו גבוהים יותר, וגם כאשר בכל פעם גל סינוס הקלט מתקרב למעברי האפס.
אם נעשה ניסיון לתקן בעיה זו על ידי הוספת מהדק תדר, התוצאה היא פלט בעל צורת גל מעוותת, שנראה בלתי נמנע בשל העובדה ש'טון 'נותר בלתי מותאם להליך זה.

עם זאת פיתוח טכניקה חלופית מסייע להשגת תיקון מקדם כוח אמיתי גם במצב לא רציף (DCM). ניתן ללמוד את עקרון הפעולה באיור להלן ועם המשוואות המצורפות.

בהתייחס לתרשים לעיל, ניתן להעריך את זרם שיא הסליל על ידי פתרון:

זרם הסליל הממוצע בהתייחס למחזור המיתוג (שמניחים בנוסף כזרם הקו המיידי למחזור המיתוג הנתון, בשל העובדה שתדירות המיתוג גבוהה בדרך כלל מתדר הקו בו מתרחשות וריאציות מתח הקו. ), מתבטאת בנוסחה:

שילוב הקשר לעיל ופישוט התנאים נותן את הדברים הבאים:

הביטוי שלעיל מציין בבירור ומרמז כי במקרה שמיישמת שיטה בה אלגוריתם דואג לשמור על ton.tycle / Tsw ברמה קבועה, הוא יאפשר לנו להשיג זרם קו סינוס בעל מקדם כוח אחדות גם ברציפות. אופן הפעולה.
למרות שהשיקולים לעיל מגלים כמה יתרונות בולטים לטכניקת הבקר DCM המוצעת, נראה כי זו לא הבחירה האידיאלית בגלל רמות זרם השיא הגבוהות המשויכות, כפי שמוצג בטבלה הבאה:

על מנת להשיג תנאי PFC אידיאליים, גישה הגיונית תהיה הטמעת מצב שבו מיזוג DCM ואופני הפעולה Crm לצורך חליבת הטוב ביותר מבין שני העמיתים הללו.
לכן כאשר תנאי העומס אינם כבדים ו- CrM פועל בתדירות גבוהה, המעגל עובר למצב פעולה DCM, ובמקרה כאשר זרם העומס גבוה, מצב ה- Crm מותר להתקיים כך שפסגות הזרם אכן לא נוטים לחצות את הגבולות הגבוהים הלא רצויים.
ניתן לדמיין בצורה הטובה ביותר סוג זה של אופטימיזציה על פני שני מצבי הבקרה המוצעים באיור הבא, בו מתמזגים היתרונות של שני מצבי הבקרה להשגת הפתרונות הנחשקים ביותר.

ממשיך במצב הולכה
מצב ההולכה הרציף של PFC עשוי להיות פופולרי למדי בעיצובי SMPS בשל תכונת היישום הגמישה שלהם וטווחם ויתרונותיהם הנלווים.
במצב זה מתח השיא הנוכחי נשמר ברמה נמוכה יותר וכתוצאה מכך הפסדי מיתוג ממוזערים בתוך הרכיבים הרלוונטיים, ויתרה מכך אדוות הקלט ניתנת ברמה מינימלית בתדירות קבועה יחסית, מה שמאפשר בתהליך החלקה הרבה יותר פשוט עבור אותו הדבר.
יש לדון בתכונות הבאות המשויכות לסוג ה- CCM של PFC.
בקרת Vrms2
אחת התכונות החיוניות עם עיצוב ה- PFC ביותר המופעל באופן אוניברסלי היא אות הייחוס שצריך להיות חיקוי מדרגות של נפח הקלט המתוקן.
המקבילה המתוקנת המזערמת הזו של מתח הכניסה מוחלת לבסוף במעגל לעיצוב צורת הגל הנכונה עבור זרם המוצא.
כפי שנדון לעיל, שלב מעגל מכפיל משמש בדרך כלל לפעולה זו, אך כידוע שלב מעגל מכפיל יכול להיות פחות חסכוני יחסית ממערכת מכפיל כניסה מסורתית.
מתווה דוגמא קלאסי ניתן לראות באיור שלהלן המדגים גישה PFC במצב רציף.
כפי שניתן לראות, כאן מופעל ממיר הדחיפה בעזרת PWM במצב זרם ממוצע, שהופך לאחראי על מימד זרם המשרן (זרם כניסה לממיר), בהתייחס לאות זרם הפקודה, V (i) , אשר ניתן לראות כמקבילה המוקטנת של מתח הכניסה V (in) לשיעור של VDIV.
זה מיושם על ידי חלוקת אות מתח השגיאה בריבוע של אות מתח הכניסה (מוחלק על ידי הקבל Cf, על מנת ליצור גורם קנה מידה פשוט בהתייחס לרמת מתח הכניסה).

למרות שאתה עשוי למצוא את זה קצת מביך לראות את אות השגיאה מחולק בריבוע של מתח הכניסה, הסיבה מאחורי מדד זה היא ליצור רווח לולאה (או תגובה תלויה חולפת) שאולי לא מבוסס על מתח הכניסה. מפעילה.
ריבוע המתח במכנה מנטרל עם ערך ה- Vsin יחד עם פונקציית ההעברה של בקרת ה- PWM (הפרופורציונליות של שיפוע הגרף הנוכחי של המשרה עם מתח הכניסה).
עם זאת חסרון אחד של צורה זו של PFC הוא הגמישות של המכפיל, שמאלץ שלב זה להיות מעט מעוצב במיוחד, במיוחד בחלקי טיפול הכוח במעגל, כך שהוא מקיים אפילו את תרחישי פיזור החשמל במקרה הגרוע ביותר.
שליטה במצב הנוכחי הממוצע
באיור לעיל אנו יכולים לראות כיצד אות הייחוס המופק מכפיל V (i) מסמל את צורת צורת הגל ואת טווח קנה המידה של זרם קלט ה- PFC.
שלב ה- PWM המצוין הופך לאחראי להבטחת זרם קלט ממוצע שיהיה שווה לערך הייחוס. ההליך מבוצע דרך שלב בקר הנוכחי הממוצע, כפי שניתן לראות באיור המופיע להלן.

בקרת מצב הזרם הממוצע מוגדרת בעצם לווסת את הזרם הממוצע (קלט / פלט) בהתייחס לאות הבקרה Icp, אשר בתורו נוצר על ידי שימוש בלולאת DC בתדר נמוך דרך שלב מעגל מגבר השגיאה, וזה אינו אלא הזרם המקביל המתאים לאות Vi המוצג באיור הקודם לזה.
מגבר זרם הבמה מתפקד כמשלב זרם כמו גם כמגבר שגיאה, על מנת לווסת את צורת צורת הגל, ואילו אות ה- Icp שנוצר על פני Rcp הופך לאחראי על ביצוע בקרת מתח הכניסה DC.
על מנת להבטיח תגובה ליניארית מהמגבר הנוכחי, הקלט שלו נדרש להיות דומה, מה שאומר שההפרש הפוטנציאלי שנוצר על פני R (shunt) צריך להיות דומה למתח שנוצר סביב Rcp, מכיוון שלא יכול להיות לנו DC דרך ה- קלט נגדים לא היפוך של המגבר הנוכחי.
הפלט שנוצר על ידי המגבר הנוכחי אמור להיות אות שגיאה 'בתדר נמוך' בהתאם לזרם הממוצע של השאנט, כמו גם האות מה- Isp.
כעת מתנד מייצר אות שן שמשמש להשוואת האות הנ'ל עמו, בדיוק כפי שנעשה בתכנון בקרת מצב המתח.
התוצאה היא יצירת PWM שנקבעו על ידי השוואה בין שני האותות שהוזכרו לעיל.
פתרונות PFC מתקדמים
השיטות השונות לבקרות PFC כפי שפורט לעיל (CrM, CCM, DCM) והגרסאות שלהן מספקות למעצבים אפשרויות מגוונות להגדרת מעגלי PFC.
עם זאת, למרות אפשרויות אלה, החיפוש העקבי אחר השגת מודולים טובים ומתקדמים יותר מבחינת יעילות איפשר לאבחן עיצובים מתוחכמים יותר עבור יישומים אלה.
נדון בנושא נוסף מאחר שמאמר זה מעודכן עם המאוחר ביותר בנושא.
קודם: כיצד לבחור את המטען הנכון לסוללת Li-Ion הבא: מעגל ריקשה סולארי E