בפרויקט זה נלמד כיצד ליצור מעגל נהג מנוע צעד חד-קוטבי פשוט באמצעות 555 טיימר IC. מלבד טיימר 555 אנו זקוקים גם ל- CD CD 4017 שהוא IC נגד עשור.
מאת אנקיט נגי
ניתן לחבר כל מנוע חד קוטבי למעגל זה לביצוע משימה ספציפית, אם כי תחילה עליך לבצע כמה שינויים קטנים.
ניתן לשלוט על מהירות מנוע הצעד מפוטנציומטר המחובר בין פריקה לסף סיכה של טיימר 555 .
בסיסי מנוע צעד
מנועי צעד משמשים באזורים בהם נדרשת כמות ספציפית של סיבוב, שאינם ניתנים להשגה באמצעות מנועי DC רגילים. יישום אופייני של מנוע צעד נמצא במדפסת תלת-ממדית. תוכלו למצוא שני סוגים של מנוע צעד פופולרי: UNIPOLAR ו- BIPOLAR.
כפי שהשם מרמז, מנוע צעד חד קוטבי מכיל פיתולים עם חוט משותף שניתן להניע אותו בזה אחר זה.
בעוד שלמנוע צעד דו קוטבי אין מסוף משותף בין הסלילים שבגללו לא ניתן להניע אותו פשוט באמצעות המעגל המוצע. כדי להניע מנוע צעד דו קוטבי אנו זקוקים למעגל גשר h.
רכיבים:
1. 555 TIMER IC

שתיים. CD 4017 IC

3. נגדים 4.7K, 1K


4. פוטנציומטר 220K

5. 1 uf קבלים

6. 4 דיודים 1N4007

7. 4 טרנזיסטורים 2N2222

8. מנוע צעד חד-קוטבי

9. מקור כוח DC
מטרת 555 טיימר:
נדרש כאן טיימר 555 כדי לייצר פעימות שעון בתדירות מסוימת (ניתן לגוון באמצעות סיר 220k) הקובע את מהירות מנוע הצעד.
פרטי Pinout IC 555

מטרת CD4017:
כפי שכבר הוזכר לעיל, זהו מונה נגד עשור כלומר, הוא יכול לספור עד 10 פעימות שעון. מה שהופך את ה- IC למיוחד זה שיש לו מפענח מובנה משלו. שבגללו אינך צריך להוסיף IC נוסף כדי לפענח מספרים בינאריים.
4017 מונה עד 10 פעימות שעון מ 555 שעות ונותן תפוקה גבוהה המתאימה לכל דופק שעון בזה אחר זה מ -10 פינות הפלט שלו. בכל פעם רק סיכה אחת גבוהה.
מטרת הטרנזיסטורים:
יש כאן שתי מטרות של טרנזיסטור:
1. טרנזיסטורים מתנהגים כאן כמו מתגים ובכך ממריצים סליל אחד בכל פעם.
2. טרנזיסטורים מאפשרים לזרם גבוה לעבור דרכם ואז למנוע, ובכך לא לכלול טיימר 555 לחלוטין מכיוון שהוא יכול לספק מעט מאוד זרם.
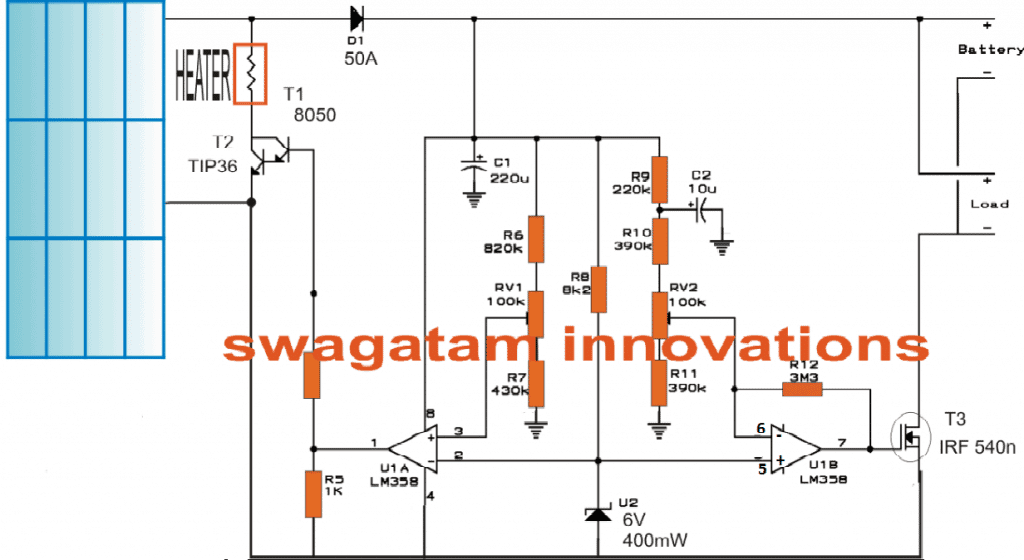
דיאגרמת מעגלים:

צור חיבורים כפי שמוצג באיור.
1. חבר את סיכה 3 או סיכת פלט של טיימר 555 לסיכה 14 (סיכת שעון) של IC 4017.
2. חבר את סיכת ההפעלה או את הסיכה ה -13 של 4017 לקרקע.
3. חבר פינים 3,2,4,7 בזה אחר זה לטרנזיסטורים 1,2,3,4 בהתאמה.
4. חבר סיכה 10 ו -15 לקרקע דרך נגד 1k.
5. חבר חוט משותף של מנוע צעד לחיובי של אספקה.
6. חבר חוטים אחרים של מנוע צעד בצורה כזו, כך שהסלילים יופעלו בזה אחר זה כדי להשלים מהפכה מלאה כראוי. (אתה יכול להסתכל בגליון הנתונים של המנוע המסופק על ידי היצרן).
מדוע פלט PIN 10 של IC 4017 מחובר ל PIN 15 שלו (איפוס PIN)?
כפי שכבר צוין לעיל 4017 סופרת פעימות שעון אחת אחת עד לדופק שעון 10 ומעניקה תפוקה גבוהה על סיכות פלט בהתאם, כל סיכת פלט עולה גבוה.
זה גורם לעיכוב מסוים בסיבוב המנוע שאינו מיותר. מכיוון שאנו דורשים רק ארבעה סיכות ראשונות למהפכה מוחלטת אחת של המנוע או ארבע ספירות עשרוניות ראשונות מ- o עד 3, סיכה לא. 10 מחובר ל- pin15 כך שאחרי ספירה 4th IC מתאפס וספירה מתחילה מההתחלה שוב. זה מבטיח שום הפרעה בסיבוב המנוע.
עובד:
לאחר ביצוע חיבורים כראוי אם תפעיל את המעגל המנוע יתחיל להסתובב בשלבים. טיימר 555 מייצר פעימות שעון בהתאם לערכי הנגד, הפוטנציומטר והקבל.
אם תשנה ערך של אחד משלושת המרכיבים הללו תדר דופק השעון ישתנה.
פעימות שעון אלה ניתנות ל- IC CD 4017 אשר לאחר מכן סופרות את פעימות השעון אחת אחת ונותנות 1 כפלט לסימן 3,2,4,7 בהתאמה וחוזר על תהליך זה ברציפות.
מכיוון שהטרנזיסטור Q1 מחובר לסיכה 3, הוא מפעיל תחילה את הטרנזיסטור Q2 ואחריו Q3 ו- Q4. אבל כאשר טרנזיסטור אחד דולק, כל השאר נשאר כבוי.
כאשר Q1 פועל הוא פועל כמו מתג סגור והזרם זורם דרך חוט משותף לחוט 1 ואז לקרקע דרך הטרנזיסטור Q1.
זה ממריץ את סליל 1 והמנוע מסתובב בזווית כלשהי שתלויה בתדר השעון. ואז אותו דבר קורה עם Q2 שמניע את סליל 2 ואחריו סליל 3 וסליל 4. כך מתקבלת מהפכה אחת שלמה.
כאשר מסובבים את הפוטנציומטר:
נניח שהמיקום הראשוני של הסיר הוא כזה שיש עמידות מרבית (220k) בין פריקה לסיכת סף. הנוסחה לתדירות הדופק של שעון הפלט היא:
F = 1.44 / (R1 + 2R2) C1
מהנוסחה ברור שתדירות פעימות השעון פוחתת ככל שערך R2 עולה. לכן כאשר ערך R2 או סיר הוא מקסימאלי, התדר הוא מינימלי שבגללו IC 4017 נחשב לאט יותר ונותן פלט עיכוב יותר.
ככל שערך ההתנגדות R2 יורד, התדר עולה אשר גורם לעיכוב מינימלי בין היציאות של IC 4017. ומכאן שמנוע צעד מסתובב מהר יותר.
לפיכך ערך הפוטנציומטר קובע את מהירות מנוע הצעד.
סרטון סימולציה:
כאן תוכלו לראות בבירור כמה מהירות המנוע משתנה עם התנגדות R2. ערכו יורד תחילה ואז גדל אשר בתורו עולה תחילה ואז מקטין את מהירות המנוע הצעד.
קודם: כיצד פועלים פנסי כננת הבא: מעגל טכומטר ארדואינו לקריאה מדויקת