בפוסט זה אנו דנים במעגל בקרת מהירות מנוע פשוט, מדויק ובהליכה מומנטית אשר עשוי להיות מותקן ביעילות ביחידות דומות לרכישת תכונת מהירות משתנה מבוקרת PWM. הרעיון התבקש על ידי מר סמואל.
מפרט טכני
יש לי הליכון שכוחו נכשל לחלוטין ... הוא יובא מסין וזה כאילו הם לא יכולים לעזור לאחר משא ומתן איתם..הערבות נועדה רק בניסיון x שלהם.
לכן, אני שואל, איך תעזור לי בתכנון ספק כוח שישליט על מהירות ושינוי כיוון של תנועת ההליכון. אני ולנצח אשמח על עבודתך.
במבט על המפרט של היחידה, ממסרי המיתוג מוגדרים עם דירוג 10A. הייתה לי גם מבט על המנוע ועליו היה כתוב 180 וולט.
זה המידע שקיבלתי אדוני. הייתה להם גם הודעת אזהרה שאסור להפעיל את ה- T.Mill ברציפות מעבר לשעתיים. אני מקווה שנתתי את הטוב ביותר לטוב. תודה אדוני. הישאר מבורך עכשיו ולתמיד! הרגעים הטובים ביותר!
העיצוב
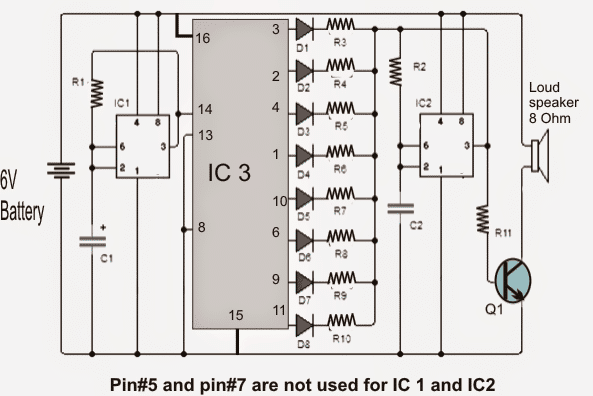
הנה מעגל בקר מהירות מנוע מבוסס PWM פשוט אשר יכול לשמש לשליטה במהירות הליכון מאפס למקסימום.
המעגל גם מספק עצירה דו כיוונית מיידית והיפוך של סיבוב המנוע באמצעות סיבוב יחיד של מתג נתון.
מאפיין מעניין נוסף במעגל זה הוא יכולתו לקיים ולאזן מומנט אופטימלי גם במהירויות נמוכות יותר ומבטיח עבודה רציפה של המנוע מבלי להעמיד אותו במהירות נמוכה במיוחד.
ניתן להבין את המעגל של בקר מהירות המנוע ההליכון המוצע בעזרת הנקודות הבאות:
כאן מוגדרים שני 555 ICs כמחולל / מיטוב PWM לרכישת בקרת המהירות הנדרשת של המנוע המחובר.
מבצע מעגל
IC1 עובד כמחולל תדרים וממוקד סביב 80Hz, כל ערך אחר יעשה גם הוא ואינו קריטי.
התדר הנ'ל מסיכה מס '3 של IC1 מועבר לסיכה מס' 2 של IC2 המחובר כסטנדרט מונו סטנדרטי. IC2 מגיב ומתחיל להתנדנד בתדר זה, ומכריח תדר גל משולש שווה ערך בנקודה 2/6 שלו.
גלי המשולש הנ'ל מושווים באופן מיידי על ידי הפוטנציאל שנקבע בסיכה מספר 5 של IC2 ויוצר רמה שווה של PWM קצוץ בסיכה מס '3.
הקביעה המוגדרת מראש או סיר הממוקם בסיכה מספר 5 של IC2 מהווים רשת חלוקה פוטנציאלית לקיבוע לבחירה של כל מתח מאפס למתח אספקה מקסימלי בסיכה 5 של IC2. רמה זו מתורגמת ישירות באמצעות PWM ממוטבים בסיכה מס '3 של אותו IC כפי שהוסבר לעיל.
ה- PWM מוזנים בשתי קבוצות של שערים לא באמצעות מתג החלפת SPDT.
שערי ה- NOT המשמשים כממירים מספקים תכונה של החלפה מיידית של כיוון הסיבוב של המנועים באמצעות סיבוב פשוט על מתג SPDT.
ה- PWM שנובעים משערי ה- NOT שנבחרו מגיעים סוף סוף לרשת הגשר הטרנזיסטורית המחזיקה את המנוע ביניהם לצורך יישום כל התכונות שצוינו שנדונו לעיל.
יש לדרג טרנזיסטורים אלה בהתאם למפרט המנוע, והמתח על פני גשר זה צריך להיות גם בהתאם לדרישות המנוע.

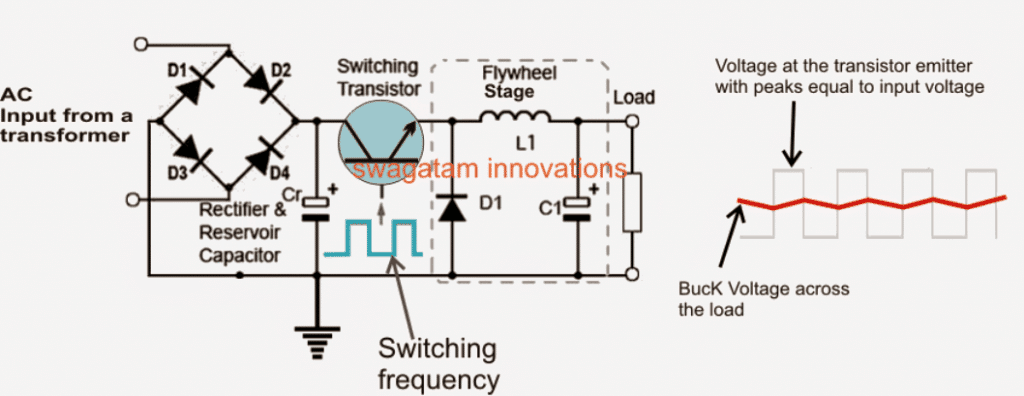
כפי שהוצע בצדק על ידי אחד הקוראים המסורים של הבלוג הזה, מר איוון, ניתן לשלוט במנוע הליכון 180 וולט באמצעות תפיסת קיצוץ שלב ראשית, המשולבת בדרך כלל בכל מתגי העמעם המסחריים לוויסות מהירות המאוורר הביתי.
סרטון וידאו:
אם אינך מעוניין במתקן קדימה אחורה, תוכל לפשט את העיצוב הנ'ל על ידי ביטול מוחלט של החלק התחתון של המעגל, כמוצג להלן:

אנא דאג לוודא להוסיף 1K על PIN5 של IC2 וקו הקרקע, או במקביל ל- C3, אחרת בקרת הכוח המיועדת לא תעבוד כראוי.
ניתן להשתמש בסיר 10K לבקרת המהירות, בעוד ש- 220uF קובע את תכונת ההתחלה הרכה. הגדלת ערך 220UF מגדילה את אפקט ההתחלה הרכה ולהיפך.
שימוש במעגל קוצץ שלב דימר
להלן מוצג עיצוב מעגלי מתג דימר שונה אשר ניתן להשתמש בו ביעילות לוויסות מנוע הליכון 180 וולט מאפס למקסימום:

קודם: הפעלת מנורת אורז יחידה עם 220 וולט AC הבא: מעגל לוח תוצאות אלקטרוני באמצעות מונה IC 4033