כאשר אנו שומעים את המילה מערכת הפעלה, בראשנו עולה כי מערכת ההפעלה המשמשת במחשבים הניידים והמחשבים. ככלל, אנו משתמשים בסוגים שונים של מערכות הפעלה כמו Windows XP, Linux, Ubuntu, Windows 7,8.8.1 ו- 10. בסמארטפונים מערכות ההפעלה הן כמו KitKat, Jellybean, Marshmallow ו- Nougat. במכשיר אלקטרוני דיגיטלי יש איזושהי מערכת הפעלה שפותחה על ידי תוכנית המיקרו-בקר . יש סוגים שונים של מערכות הפעלה לפתח עבור המיקרו-בקר, אך כאן דנו במערכת ההפעלה בזמן אמת.
מהי מערכת הפעלה בזמן אמת?
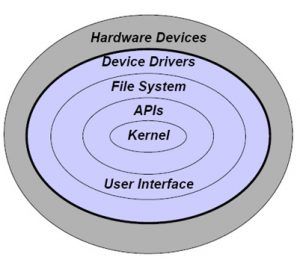
ה- RTOS היא מערכת הפעלה, היא מוח של המערכת בזמן אמת ותגובתה לתשומות באופן מיידי. ב- RTOS, המשימה תושלם בזמן הנקוב ותגובותיה באופן צפוי לאירועים בלתי צפויים. מבנה ה- RTOS מוצג להלן.

מבנה RTOS
סוגי RTOS
ישנם שלושה סוגים שונים של RTOS הבאים
- מערכת הפעלה רכה בזמן אמת
- מערכת הפעלה קשה בזמן אמת
- מערכת הפעלה איתנה בזמן אמת

סוגי RTOS
מערכת הפעלה רכה בזמן אמת
למערכת ההפעלה הרכה בזמן אמת יש מועדים מסוימים, ייתכן שתפספסו והם יבצעו את הפעולה בזמן t = 0 +. מערכת ההפעלה הרכה בזמן אמת היא סוג של מערכת הפעלה והיא אינה מכילה כללים מוגבלים לקיצוניים. הזמן הקריטי של מערכת הפעלה זו מתעכב במידה מסוימת. הדוגמאות למערכת הפעלה זו הן המצלמה הדיגיטלית, הטלפונים הניידים והנתונים המקוונים וכו '.

מערכת הפעלה רכה בזמן אמת
מערכת הפעלה קשה בזמן אמת
זהו גם סוג של מערכת הפעלה והוא נחזה על ידי מועד אחרון. המועדים החזויים יגיבו בזמן t = 0. כמה דוגמאות למערכת הפעלה זו הן בקרת כריות אוויר במכוניות, בלם נגד נעילה ומערכת בקרת מנוע וכו '.
מערכת הפעלה איתנה בזמן אמת
במשרד האמיתי בזמן אמת, למערכת הפעלה יש מגבלות זמן מסוימות, הם אינם קפדניים וזה עלול לגרום לתופעות לא רצויות. דוגמאות למערכת הפעלה זו הן בדיקה חזותית באוטומציה תעשייתית.
עבודה עם מערכת הפעלה בזמן אמת
ישנם סוגים שונים של פונקציות בסיסיות של RTOS
- מתזמן מבוסס עדיפות
- שעון המערכת קוטע את השגרה
- התנהגות דטרמיניסטית
- סנכרון והודעות
- שירות RTOS
מתזמן מבוסס עדיפות
בתזמון המבוסס על עדיפות, רוב ה- RTOS הוא בין 32 ל 256 סדרי עדיפויות אפשריים עבור המשימות או התהליכים האישיים. מתזמן זה יפעיל את התהליך בעדיפות הגבוהה ביותר. אם המשימה פועלת על המעבד, משימת העדיפות הגבוהה הבאה פועלת וממשיכה את התהליכים.
במערכת, בתהליך העדיפות הגבוהה ביותר יהיה המעבד
- זה רץ להיסגר
- אם המשימה המקורית מונעת מראש על ידי החדש, אז תהליך עדיפות גבוהה נעשה מוכן.
ישנם שלושה מצבים של המשימות או התהליכים שהם כמו מוכנים להפעלה והשני חסום ותיאור כל מצב ניתן להלן.
מוכן לרוץ
מוכנים להפעלה אמורים להיות כאשר לתהליך יש את כל המשאבים להפעלה, אך הוא לא אמור להיות במצב פועל. ואז זה נקרא מוכן להפעלה.
רץ
אם המשימה מבוצעת, נאמר שיש לה מצב פועל.
חָסוּם
במצב זה, אם אין לו מספיק משאבים להפעלה, הוא נשלח למצב חסום.
שלוש טכניקות משתנות כדי לתזמן את המשימה, להלן תיאורן.
תזמון משתף פעולה
בתזמון מסוג זה, המשימה תפעל עד לסיום הביצוע
סיבוב תזמון רובין
בתזמון זה, לכל תהליך מוקצה משבצת זמן קבועה והתהליך צריך להשלים את ביצועו, אחרת המשימה מאבדת את זרימתה וייצור הנתונים.
תזמון מניע
התזמון המונע כרוך בהקצאת זמן העדיפה לפי זמן. בדרך כלל משתמשים ב- 256 רמות עדיפות ולכל משימה רמת עדיפות ייחודית. ישנן כמה מערכות התומכות ברמת העדיפות הגבוהה יותר ולמשימות מרובות יש כמה עדיפויות.
שגרת הפסקת שעון המערכת
כדי לבצע את הפעולה הרגישה לזמן ה- RTOS יספק סוג של שעוני מערכת. אם יש שעון מערכת 1ms, עליך להשלים את המשימה ב 50ms. בדרך כלל, יש ממשק API שעוקב אחריך ואומר 'בעוד 50ms תעירו אותי'. מכאן שהמשימה תהיה במצב שינה עד שה- RTOS יתעורר. יש לנו שתי הודעות שההערות לא תבטיח לרוץ בדיוק באותה תקופה, זה תלוי בעדיפות ואם העדיפות הגבוהה יותר פועלת כרגע זה יתעכב.
התנהגות דטרמיניסטית
ה- RTOS נמשך לאורך זמן רב כדי להגן על כך שלקחת 100 משימות או 10 משימות, אין זה משנה את המרחק כדי להחליף הקשר והוא קובע את משימת העדיפות הגבוהה ביותר הבאה. באזור הדטרמיניסטי הראשי ה- RTOS הוא הטיפול בהפרעה, כאשר קו ההפרעה מסומן להם ה- RTOS נוקט מיד בפעולה של שגרת שירות ההפסקה הנכונה וההפרעה מטופלת ללא כל עיכוב.
עלינו להרעיש שמפתחי הפרויקט יכתבו את ISR ספציפי לחומרה. עד כה ה- RTOS נותן את ה- ISR ליציאות הטוריות, שעוני מערכת וייתכן שמדובר בחומרת רשת, אך אם יש משהו המתמחה כמו אותות קוצב לב, מפעילים וכו ', אינם חלק מה- RTOS.
זה הכל על הכללות גסות ויש יישום מגוון גדול ב- RTOS. חלק מה- RTOS מופעלים בצורה שונה והתיאור לעיל מסוגל לחלק הגדול של ה- RTOS הקיים.
סנכרון והודעות
הסנכרון וההודעות מספקים את התקשורת בין המשימה של מערכת אחת למערכת אחרת לבין שירותי המסרים הבאים. כדי לסנכרן את הפעילויות הפנימיות משתמשים בדגל האירוע וכדי לשלוח את הודעות הטקסט בהן אנו יכולים להשתמש בתיבת הדואר, הצינורות ובתורי ההודעות. באזורי הנתונים הנפוצים משתמשים בסמפורות.
- סמפורות
- דגלי אירוע
- תיבות דואר
- צינורות
- תורי הודעות
שירות RTOS
החלק החשוב ביותר במערכת ההפעלה הוא הליבה. כדי לפקח על החומרה יש להקל על המשימה ולנהל את ליבת האחריות ולהקצות את המשאבים. אם המשימה אינה יכולה להשיג את תשומת הלב של המעבד בכל פעם, ישנם כמה שירותים אחרים המסופקים על ידי הליבה. להלן
- שירותי זמן
- הפסקת שירותי הטיפול
- שירותי ניהול מכשירים
- שירותי ניהול זיכרון
- שירותי קלט-פלט
היתרונות של RTOS
- כאשר כל המשאבים והמכשירים אינם פעילים, אז ה- RTOS נותן צריכה מקסימאלית של המערכת ותפוקה רבה יותר.
- כאשר מטלה מבוצעת אין שום סיכוי לקבל את השגיאה מכיוון ש- RTOS הוא ללא שגיאות.
- הקצאת זיכרון היא הסוג הטוב ביותר לניהול בסוג זה של מערכת.
- במערכת מסוג זה, זמן ההעברה הוא פחות.
- בגלל גודלה הקטן של התוכנית, נעשה שימוש ב- RTOS ב- מערכת משובצת מחשב כמו תחבורה ואחרים.
במאמר זה דנו כיצד תעבוד מערכת ההפעלה בזמן אמת. אני מקווה שקראתי את זה קיבלת מידע בסיסי. אם יש לך שאלות לגבי מאמר זה או ליישום פרויקטים חשמליים , אנא אל תהסס להגיב בסעיף שלהלן. הנה השאלה עבורך, מה הפונקציות של ה- RTOS?