בקר בקר מנוע רב-תכליתי (BLDC) רב-תכליתי זה מיועד לשליטה בכל מנוע BLDC בעל 3-פאזה עם מתח גבוה, זרם גבוה, חיישן אפקט הול, המצוידים בדיוק ובבטיחות קיצוניים. בואו ללמוד את הפרטים לעומק.

באמצעות IC MC33035
'גיבור' המעגל הוא בקר השבבים היחיד MC33035 שהוא מודול IC בעל ביצועים גבוהים של הדור השני, הכולל את כל הפונקציות הפעילות הנדרשות העשויות להידרש להפעלת BLDC הנוכחי ביותר, מתח גבוה, תלת פאזי או 4 שלבים. מנועים עם לולאה פתוחה או תצורת לולאה סגורה.

ה- IC מצויד במפענח מיקום רוטור המאפשר רצף שינויים מדויק, התייחסות מפוצלת טמפרטורה להקלת מתח חיישן נכון, מתנד שיניים בעל תכנות לתכנות, שלושה שלבי מובנה פתוחים בצד העליון של הקולט, ושלושה מוט מוט זרם גבוה. הקלד נהגים בצד נמוך, שתוכננו במיוחד להפעלת שלב בקר מנועי מתח גבוה של גשר H.
השבב מחוזק גם באופן פנימי עם תכונות הגנה מתקדמות, ושלבי בקרה חסינים בפני שוטים כגון נעילת מתח תחתון, הגבלת זרם מחזור אחר מחזור באמצעות אפשרות של כיבוי עיכוב מתכוונן, כיבוי פנימי של טמפרטורה גבוהה של IC, ומתוכנן באופן בלעדי. פינוי פלט תקלות שעשוי להתממשק עם MCU לצורך עיבוד מתקדם ועיבודים מתקדמים.
פונקציות אופייניות שניתן לבצע באמצעות IC זה הן בקרת מהירות לולאה פתוחה, בקרת כיוון לאחור קדימה, 'הפעלת הפעלה', תכונת בלם דינמית לחירום.
ה- IC נועד לעבוד עם חיישני מנוע בעלי שלבים של 60 עד 300 מעלות או 120 עד 240 מעלות, כבונוס שה- IC יכול לשמש גם לשליטה במנועים המוברשים המסורתיים.
איך עובד ה- IC
MC33035 הוא בין כמה בקרי מנועים ללא מברשות DC מונוליטים בעלי יעילות גבוהה שנוצרו על ידי מוטורולה .
הוא מורכב כמעט מהיכולות הדרושות להנעת מערכת בקרת מנועים עם לולאה פתוחה הכוללת תכונות מלאות.
יתר על כן, הבקר יכול להיות מושלם כדי לשלוט על מנועי מברשת DC. עוצב בטכנולוגיה דו קוטבית אנלוגית, והוא כולל רמת יעילות ועמידות מעולה בסביבה מתועשת חסרת רחמים.
ה- MC33035 נושא מפענח מיקום רוטור לרצף שינויים מדויק, סביבה מוחזרת בסביבה המוסמכת לספק מתג חיישן, מתנד שיניים מסור לתכנות, מגבר שגיאות נגיש לחלוטין, משווה מאפנן רוחב הדופק, 3 יציאות כונן עליונות אספן פתוח, ו- 3 תפוקות נהג נמוכות יותר עם מוט טוטם זרם גבוה בדיוק עבור MOSFET כוח ההפעלה.
מובנים ב- MC33035 יכולות מיגון הכוללות נעילת מתח תת-מתח, הגבלת זרם מחזור-על-מחזור עם מצב כיבוי תוחם עם זמן עיכוב לבחירה, כיבוי תרמי מובנה, יחד עם יציאת תקלות בלעדית שתממשק בצורה נוחה לבקר המעבד.
מאפייני בקרת מנוע סטנדרטיים משלבים בקרת מהירות לולאה פתוחה, סיבוב קדימה או אחורה, הפעלת ריצה ובלימה דינמית. נוסף על כך, ל- MC33035 יש סיכה נבחרת של 60 ° / 120 ° אשר מגדירה את מפענח מצב הרוטור עבור כניסות שלב חשמליות של חיישן 60 ° או 120 °.

פונקציות PIN OUT:
Pin1, 2, 24 (Bt, At, Ct) = אלה שלוש יציאות הכונן העליונות של ה- IC שצוינו להפעלת התקני הכוח שהוגדרו חיצונית כגון BJT. Pinouts אלה מוגדרים באופן פנימי כמצב אספן פתוח.
סיכה מס '3 (Fwd, Rev) = פינאוט זה נועד לשמש לבקרת כיוון סיבוב המנוע.
סיכה מס '4, 5, 6 (Sa, Sb, Sc) = אלה 3 יציאות חיישנים של ה- IC שהוקצו לפקד על רצף הבקרה של המנוע.
פין מס '7 (הפלט אפשרי) = סיכה זו של ה- IC מוקצה כדי לאפשר את פעולת המנוע כל עוד נשמר כאן היגיון גבוה, ואילו היגיון נמוך הוא לאפשר התנעה של המנוע.
סיכה מס '8 (פלט הפניה) = סיכה זו מופעלת עם זרם אספקה לטעינת קבל תזמון המתנד Ct וכן מספק רמת התייחסות למגבר השגיאה. זה יכול לשמש גם לאספקת כוח אספקה לחיישני IC של חיישן האפקט המנוע.
סיכה מס '9 (קלט שאינו הופך לחישה הנוכחית) : תפוקת האות של 100mV עשויה להיות מושגת מפינוט זה בהתייחס לסיכה מס '15 ומשמשת לביטול הולכת מתגי הפלט במהלך מחזור מתנד מוגדר. בדרך כלל, פינאוט זה מתחבר לצד העליון של נגע החישה הנוכחי.
סיכה מס '10 (מתנד) : פינאוט זה קובע את תדר המתנד עבור ה- IC בעזרת רשת ה- RC Rt ו- Ct.
פין מס '11 (קלט מגבר שאינו הופך) : Pinout זה משמש עם פוטנציומטר בקרת המהירות.
סיכה מס '12 (מגבר שגיאה בהיפוך קלט) : סיכה זו מחוברת באופן פנימי עם פלט מגבר השגיאות הנ'ל כדי לאפשר יישומי לולאה פתוחה .
פין מס '13 (פלט מגבר שגיאה / קלט PWM) : תפקידו של pinout זה לספק פיצוי במהלך יישומים במעגל סגור.
סיכה מס '14 (פלט תקלה) : יציאת מחוון תקלות זו עשויה להפוך לשפל הגיוני פעיל בכמה תנאים קריטיים כגון: קוד קלט לא חוקי עבור החיישן, הפעלת pinout מוזנת עם היגיון אפס, pinout קלט החישה הנוכחי עולה על 100mV (@ pin9 בהתייחס ל- pin15) , הפעלת נעילת מתח תחת או מצב כיבוי תרמי).
סיכה מס '15 (קלט היפוך החוש הנוכחי) : סיכה זו מוגדרת לספק את רמת הייחוס לסף הפנימי של 100mV, וניתן לראות אותה מחוברת עם הנגד לחוש הנוכחי של הצד הנוכחי.
סיכה מס '16 (GND) : זהו סיכת הקרקע של ה- IC ומיועד לספק את אות הקרקע למעגל הבקרה ונדרש להפנות חזרה לאדמת מקור הכוח.
סיכה מס '17: (Vcc) : זהו הסיכה החיובית של האספקה שצוינה לספק את המתח החיובי למעגל הבקרה של ה- IC. טווח הפעולה המינימלי של סיכה זו הוא 10 וולט והמקסימום הוא 30 וולט.
פין מס '18 (וידיאו) : Pinout זה מגדיר את המצב הגבוה (Voh) ליציאות הכונן התחתונות באמצעות הכוח המיוחס לסיכה זו. הבמה עובדת בטווח של 10 עד 30 וולט.
סיכה # 19, 20, 21 (Cb, Bb, Ab) : שלושת אלה pinouts מסודרים באופן פנימי בצורה של יציאות מוט טוטם והם מוקצים להניע את התקני כוח הפלט הכונן התחתון.
פין מס '22 (60 D, בחירת משמרת פאזה 120D) : הסטטוס המיוחס לפינאוט זה מגדיר את פעולת מעגל הבקרה באמצעות חיישני האפקט הול עבור כניסות זווית פאזה של 60 מעלות (לוגיקה גבוהה) או 120 מעלות (לוגיקה נמוכה).
סיכה מספר 23 (בלם) : לוגיקה נמוכה בתאריך זה תאפשר למנוע BLDC לפעול בצורה חלקה בעוד שגיון הגיוני יפסיק באופן מיידי את פעולת המנוע באמצעות האטה מהירה.
תיאור פונקציונלי
תרשים גוש פנימי מייצג באיור לעיל. שיח היתרונות והעבודה של כל אחד מהבלוקים המרכזיים המפורטים להלן.
מפענח מיקום הרוטור
מפענח מיקום רוטור פנימי מודד את 3 כניסות החיישן (סיכות 4, 5, 6) כדי להפוך את הרצף הנכון של פינות הכונן העליונות והתחתונות. כניסות החיישן מיוצרות כדי להתממשק ישר עם בוררי הול אפקט מסוג אספן פתוח או מצמדים מחוררים אופטיים.
נגדי משיכה מובנים מסווגים כדי לצמצם את הכמות הנדרשת של חלקים חיצוניים. הקלטים תואמים ל- TTL, כאשר הספים שלהם אופייניים ל -2.2 V.
טווח ה- IC33035 של ICs נועד לשלוט במנועים תלת פאזיים ולפעול עם 4 מהמוסכמות הפופולריות ביותר של שלב חיישנים. בחירה של 60 ° / 120 ° (סיכה 22) מסופקת בצורה מהירה ומספקת את MC33035 להגדרה בפני עצמה כדי לווסת מנועים שיש להם חיישן חשמלי של 60 °, 120 °, 240 ° או 300 °.
עם 3 כניסות חיישנים תגלה 8 תצורות קוד קלט פוטנציאליות, 6 מהן מיקומי רוטור לגיטימיים.
שני הקודים האחרים מיושנים מכיוון שהם בדרך כלל תוצאה של חיבור חיישן פתוח או קצר.
עם 6 קודי קלט מוצדקים, המפענח עשוי לטפל במיקום הרוטור המנוע בטווח של 60 מעלות חשמל.
הקלט קדימה / לאחור (סיכה 3) משמש ככלי לשינוי מהלך לוח הזמנים המנוע על ידי היפוך המתח על פני סלילת הסטטור.
ברגע שהמצב משתנה, מגבוה לנמוך באמצעות קוד תכנית קלט חיישן שהוקצה (למשל 100), יציאות הכונן העליונות והבסיסים המקלות המשתמשות באותו מצב אלפא מוחלפות (AT ל- AB, BT ל- BB, CT ל- CB).
בעיקרו של דבר, המחרוזת המשתנה משתנה כיוון והמנוע הופך את רצף הכיוונים. בקרת הפעלה / כיבוי של המנוע מושגת באמצעות הפלט הפעלה (סיכה 7).
בכל פעם שהוא לא מנותק, אספקת זרם פנימית של 25 מיקרו-אץ מאפשרת רצף של יציאות הכונן המובילות והבסיסיות. כאשר הם מקורקעים, יציאות הכונן של החלק העליון נכבות וכונני הבסיס נדחקים למצב נמוך, ומעוררים את המנוע לחוף ואת תפוקת התקלה להפעיל.
בלימת מנוע דינמית מאפשרת לפתח מרווח הגנה עודף למכשיר הסופי. מערכת הבלימה מושגת על ידי הצבת קלט הבלמים שלך (סיכה 23) למצב גבוה יותר.
זה מוביל לכיבוי הכוננים העליונים לכיבוי ולכונן התחתון להפעיל, וקצר את המנוע הנוצר שוב EMF. לקלט הבלמים יש התחשבות מוחלטת ומכל הלב על כל תשומות אחרות. קו הנגד הפנימי של 40 kΩ הנגרם מעל קו הקו המתממשק באמצעות מתג הבטיחות של התוכנית על ידי הבטחת הפעלת הבלמים במקרה שנפתח או נכבה.
טבלת האמת של לוגיקת ההסבה מוצגת להלן. שער NOR של 4 כניסות משמש לבדיקת כניסת הבלמים ואת הכניסות ל -3 BJT של כונן העליון.

המטרה היא בדרך כלל לכבות את הבלימה לפני שתפוקות הכונן העליונות משיגות מעמד גבוה. זה מאפשר לך להימנע מליסינג מסונכרן של מתגי ההפעלה העליונים והבסיסיים.
בתוכניות כונן מנועי למחצה, בדרך כלל אין צורך ברכיבי הכונן העליונים והם ברוב המקרים מנותקים. בנסיבות מסוג זה עדיין תושג בלימה מכיוון ששער NOR מזהה את מתח הבסיס ל- BJT של פלט הכונן העליון.
מגבר שגיאות
מגבר שגיאות בעלות יעילות משופרת במלואו עם גישה פעילה לכל קלט ופלט (סיכות מס '11, 12, 13) מוצע לסייע בביצוע בקרת מהירות המנוע במעגל סגור.
המגבר מגיע עם עלייה במתח DC סטנדרטי של 80 dB, רוחב פס של רווח של 0.6 מגה הרץ, יחד עם טווח מתח רחב של קלט במצב משותף שנמתח מהקרקע ועד Vref.
ברוב התוכניות לבקרת מהירות בלולאה פתוחה, המגבר מוגדר כחסיד מתח רווח אחדות כאשר הקלט הלא-הופך מחובר לאספקת המתח המהירה.
מתנד התדירות של מתנד הרמפה הפנימי מחוברת דרך הערכים עליהם מחליטים עבור אלמנטים תזמון RT ו- CT.
קבלים CT יטענו באמצעות פלט הפניה (פין 8) באמצעות הנגד RT ויוזרם דרך טרנזיסטור פריקה פנימי.
שיא הרמפה ומתחי הבור הם בדרך כלל 4.1 V ו- 1.5 V בהתאמה. כדי להציע חיסכון הגון בין רעש נשמע וביצועי מיתוג פלט, מומלץ תדר מתנד בבחירה של 20 עד 30 קילוהרץ. התייחס לאיור 1 לבחירת רכיבים.
מאפנן רוחב דופק
אפנון רוחב הדופק המשולב מציע גישה יעילה כוח לכיוון מהירות המנוע על ידי שינוי המתח הסטנדרטי המיוחס לכל סטטור המתפתל לאורך סדרת ההסעות.
עם פריקת ה- CT, המתנד מדגמן כל תפס, ומאפשר הולכה של יציאות הכונן העליונות והתחתונות. משווה ה- PWM מאפס את התפס העליון ומפסיק את חכירת תפוקת הכונן התחתונה ברגע שהרמפה החיובית של CT הופכת להיות מעבר לתוצאת מגבר השגיאה.
תרשים התזמון של אפנון רוחב הדופק מוצג באיור 21.
אפנון רוחב הדופק לניהול מהירות מציג את עצמו אך ורק ביציאות הכונן התחתונות. מגבלה נוכחית תפקוד מתמיד של מנוע שעשוי להיות עמוס יתר על המידה מוביל להתחממות יתר ולתקלה בלתי נמנעת.
ניתן למנוע באופן מיטבי את המצב המזיק יחד עם השימוש במגבלת זרם מחזור - מחזור.
כלומר, כל מחזור מתמודד עם היותו פונקציה עצמאית. הגבלת זרם מחזור אחר מחזור מושגת על ידי מעקב אחר הצטברות זרם הסטאטור בכל פעם שמתג יציאה מפעיל, ולאחר שחש במצב זרם גבוה, השבתת המתג באופן מיידי ושמירה עליו למשך התקופה המצטיינת של מרווח עליית מתנד.
זרם הסטטור הופך למתח באמצעות הפעלת נגע חישה הקרקעי RS (איור 36) בקנה אחד עם 3 טרנזיסטורי המתגים בחלק התחתון (Q4, Q5, Q6).
המתח שנקבע לאורך הנגד הצפוי מפוקח על ידי קלט החישה הנוכחי (סיכות 9 ו -15), ובהשוואה לנקודת הייחוס הפנימית של 100 mV.
כניסות השוואת החושים הנוכחיות מגיעות עם טווח מצב נפוץ קלט של בערך 3.0 V.
במקרה שעולה על סובלנות החישה הנוכחית של 100 mV, המשווה מאפס את נעילת החישה התחתונה ומסיים את הולכת מתגי הפלט. הערך לנגד החישה הנוכחי הוא למעשה:
Rs = 0.1 / Istator (מקסימום)
תפוקת התקלה מתחילה במצב של מגבר גבוה. הגדרת ה- PWM עם תפס כפול תפס מוודאת כי רק דופק טריגר יחיד של יציאה מתעורר במהלך שגרת מתנד מסוימת, בין אם נגמרה או לא דרך פלט מגבר השגיאה או משווה הגבול הנוכחי.
הרגולטור על שבב 6.25 וולט (פינ 8) מציע זרם טעינה עבור קבל תזמון המתנד, נקודת התייחסות למגבר השגיאה, המאפשרים לו לספק זרם של 20 מילי-אמפר המתאים לחיישנים המפעילים במיוחד בתוכניות מתח נמוך.
למטרות מתח גדולות יותר, זה יכול להיות חשוב להחליף את הכוח הנפלט מהווסת מה- IC. זה בהחלט מושג בעזרת טרנזיסטור מעבר אחר כפי שמוצג באיור 22.
נראה שהוחלט על נקודת מידה של 6.25 וולט כדי לאפשר טיוח של מעגל ה- NPN הישיר, בכל מקום ש- Vref - VBE יעלה על המתח המינימלי החיוני של חיישני הול אפקט על פני חום.
לאחר מבחר טרנזיסטורים תקין וכיור קירור מספיק ניתן לרכוש עד 1 אמפר זרם עומס.
נעילת מתח תחתון
נעילת תת-מתח תת-כיוונית שולבה כדי להפחית את הפגיעה ב- IC ובטרנזיסטורי מתג ההפעלה האלטרנטיביים. במהלך גורמי אספקת חשמל נמוכים, זה מבטיח את העובדה כי IC וחיישנים פונקציונליים לחלוטין, ושיש מתח יציאה כונן בסיסי.
ספקי הכוח החיוביים ל- IC (VCC) ולכוננים הנמוכים (VC) נבחנים כל אחד על ידי משווים עצמאיים שמקבלים את סף ה- 9.1 V. שלב מסוים זה מבטיח נסיעה נאותה בשער הנדרשת להשגת RDS נמוכה (מופעלת) בכל פעם שמפעילים כוח רגיל. ציוד MOSFET.
בכל הפעלה ישירה של חיישני הול מההפניה, פעולת חיישנים בלתי הולמת מופיעה במקרה שמתח הפלט של נקודת הייחוס יורד מתחת ל -4.5 וולט.
ניתן להשתמש במשווה שלישי כדי לזהות נושא זה.
כאשר יותר מאחד מהמשווים קולט מצב של מתח נמוך, תפוקת התקלות מופעלת, הריצות העליונות מושתקות ויציאות כונן הבסיס מאורגנות בנקודה נמוכה.
כל אחד מהמשווים משלב היסטריה להגנה מפני אמפליטודות כאשר מגשרים על הספים האישיים שלהם.
פלט תקלה
תפוקת התקלה הפתוחה של אספן פתוח (סיכה 14) נועדה להציע פרטי ניתוח במקרה של תקלה בתהליך. יש לו יכולת זרם כיור של 16 מילי-אמפר ועשוי להניע דיודה פולטת אור לאות גלוי. יתר על כן, הוא ממשק בצורה נוחה עם ההיגיון של TTL / CMOS לשימוש בתכנית המופעלת על ידי מעבד.
תפוקת התקלות אפקטיבית נמוכה כאשר יותר מאחד מהמצבים הבאים מתרחשים:
1) קודי קלט חיישנים לא חוקיים
2) פלט אפשרי בהיגיון [0]
3) קלט החישה הנוכחי יותר מ 100 mV
4) נעילת מתח תחתון, הפעלה של אחד או יותר מהמשווים
5) כיבוי חום, טמפ 'צומת מיטבי מקבל מקסימום תפוקה בלעדית זו עשויה לשמש גם כדי להבדיל בין הפעלת מנוע או תפקוד סובלני במצב מוצף.
בעזרת רשת RC בין פלט התקלות וכניסת האפשרויות, זה אומר שתוכל לפתח כיבוי תפס מושהה בזמן ביחס לזרם יתר.
מעגלים נוספים המוצגים באיור 23 מסייעים בהפעלה ללא מאמץ של מערכות מנוע המצוידות בעומסים אינרציאליים גבוהים יותר על ידי מתן מומנט איסוף משלים, תוך שמירה על הגנה מפני זרם יתר. משימה זו מושגת על ידי הצבת המגבלה הנוכחית לערך הבא מהמינימלי לתקופה שנקבעה. במהלך מצב של זרם-יתר ארוך במיוחד, הקבל CDLY יטען, מה שמעורר את קלט המאפשר לעבור את הסובלנות שלו למצב נמוך.
כעת ניתן לעצב תפס על ידי מחזור המשוב החיובי מפלט התקלה לאפשרות הפלט. כאשר הוא מוגדר, על ידי קלט החישה הנוכחי, ניתן היה לאפס אותו רק על ידי קיצור CDLY או רכיבה על אופניים על ידי ספקי הכוח.
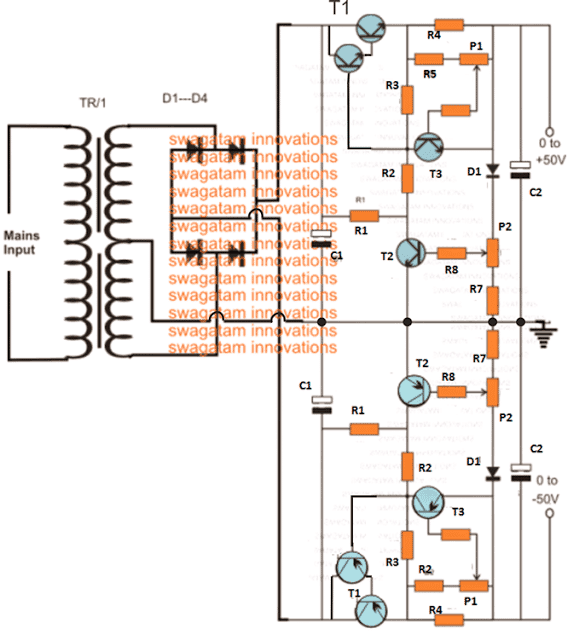
סכמת BLDC גבוהה מתפקדת באופן מלא
מעגל בקר BLDC זרם גבוה פונקציונלי מלא באמצעות מכשיר הסבר לעיל יכול להיות עד למטה, הוא מוגדר כמצב גל מלא, תלת פאזי, 6 שלבים:

קודם: חישוב מתח, זרם במשרן באק הבא: הכינו קטנוע חשמלי / מעגל ריקשה