
ממשק הוא אחד המושגים החשובים ב מיקרו-בקר 8051 מכיוון שמיקרו-בקר הוא מעבד שיכול לבצע פעולה כלשהי על נתונים ונותן את הפלט. עם זאת כדי לבצע את הפעולה אנו זקוקים למכשיר קלט להזנת הנתונים ובתורו מכשיר הפלט מציג את תוצאות הפעולה. כאן אנו משתמשים במקלדת ובתצוגת LCD כמכשירי קלט ופלט יחד עם המיקרו-בקר.

מיקרו-בקר 8051 מכשירים היקפיים
ממשק הוא תהליך של חיבור מכשירים יחד כדי שיוכלו להחליף את המידע וזה מתגלה כקל יותר לכתוב את התוכניות. ישנם סוגים שונים של התקני קלט ופלט באשר לדרישה שלנו, כגון נוריות LED, LCD, 7 מגזרים, לוח מקשים, מנועים והתקנים אחרים.
הנה כמה מודולים חשובים שהתממשקו למיקרו-בקר 8051.
1. ממשק LED למיקרו-בקר:
תיאור:
נוריות LED משמשות לרוב ביישומים רבים לציון הפלט. הם מוצאים מגוון עצום של יישומים כמדדים במהלך הבדיקה לבדיקת תקפות התוצאות בשלבים שונים. הם זולים מאוד וזמינים במגוון צורות, צבע וגודל.

דיודה פולטת אור
העיקרון של הפעלת נוריות LED זה ממש קל. נוריות נוריות פשוטות משמשות גם כמכשירי תצוגה בסיסיים, במצב ON ו- OFF מבטא משמעות מלאה על המכשיר. לנורות הלד הנפוצות יש ירידת מתח של 1.7 וולט, כלומר כאשר אנו מיישמים מעל 1.7 וולט, הדיודה מוליכה. הדיודה זקוקה לזרם 10mA כדי להאיר בעוצמה מלאה.
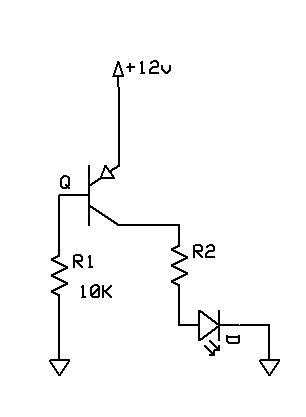
המעגל הבא מתאר 'כיצד להדליק את נוריות הנוריות'.
ניתן לממשק נוריות למיקרו-בקר בתצורת אנודה משותפת או בתצורת קתודה משותפת. כאן נוריות ה- LED מחוברות בתצורת אנודה משותפת מכיוון שתצורת הקתודה המשותפת צורכת יותר כוח.
תרשים מעגלים

ממשק לד למיקרו-בקר
קוד מקור:
#לִכלוֹל
ריק ראשי ()
{
int חתום אני
בעוד (1)
{
P0 = 0x00
עבור (i = 0i<30000i++)
P0 = 0xff
עבור (i = 0i<30000i++)
}
}
2. מעגל ממשק תצוגה בן 7 קטעים
תיאור:
תצוגת שבעה קטעים היא התצוגה האלקטרונית הבסיסית ביותר. הוא מורכב משמונה נוריות שמשויכות באופן רצף כדי להציג ספרות מ -0 עד 9 כאשר שילובים נאותים של נוריות מופעלות. תצוגה בת 7 קטעים משתמשת בשבע נוריות לד כדי להציג ספרות מ -0 עד 9 והנורית ה -8 משמשת לנקודה. קטע שבעה טיפוסי נראה כמו מוצג באיור להלן.

תצוגה בת 7 קטעים
התצוגות בעלות 7 החלקים משמשות במספר מערכות להצגת המידע המספרי. הם יכולים להציג ספרה אחת בכל פעם. לפיכך מספר הקטעים המשמשים תלוי במספר הספרות להצגה. כאן הספרות 0 עד 9 מוצגות ברציפות בעיכוב זמן מוגדר מראש.
התצוגות בעלות 7 החלקים זמינות בשתי תצורות שהן אנודה משותפת וקתודה משותפת. כאן משתמשים בתצורת אנודה נפוצה מכיוון שזרם הפלט של המיקרו-בקר אינו מספיק בכדי להניע את נוריות הנורות. התצוגה בת 7 הקטעים עובדת על לוגיקה שלילית, עלינו לספק לוגיקה 0 לסיכה המתאימה כדי ליצור זוהר LED.

תצורות תצוגה בת 7 קטעים
הטבלה הבאה מציגה את ערכי ה- hex המשמשים להצגת הספרות השונות.

טבלת תצוגת 7 מגזרים
תרשים מעגלים

ממשק תצוגת 7 מגזרים
קוד מקור:
#לִכלוֹל
sbit a = P3 ^ 0
ריק ראשי ()
{
תו לא חתום n [10] = {0x40,0xF9,0x24,0x30,0x19,0x12,0x02,0xF8,0xE00,0x10}
לא חתום int i, j
a = 1
בעוד (1)
{
עבור (i = 0i<10i++)
{
P2 = n [i]
עבור (j = 0j<60000j++)
}
}
}
3. ממשק LCD למיקרו-בקר
LCD מייצג תצוגת גביש נוזלי שיכולה להציג את התווים בכל שורה. כאן תצוגת LCD של 16 על 2 יכולה להציג 16 תווים בשורה ויש שתי שורות. ב- LCD זה כל תו מוצג במטריצת 5 * 7 פיקסלים.

תצוגת אל סי די
LCD הוא מכשיר חשוב מאוד המשמש כמעט לכל המכשירים האוטומטיים כגון מכונות כביסה, רובוט אוטונומי, מערכות בקרת כוח ומכשירים אחרים. זה מושג על ידי הצגת הסטטוס שלהם במודולי תצוגה קטנים כמו 7-שבע קטעי תצוגה, נוריות LED רב-פלגות וכו '. הסיבות לכך הן שקופות LCD במחיר סביר, ניתנות לתכנות בקלות ואין להן מגבלות על הצגת תווים מיוחדים.
הוא מורכב משני רושמים כגון רישום פקודה / הוראות ומרשם נתונים.
פקודת הפקודה / הוראות מאחסנת את הוראות הפקודה הניתנות ל LCD. פקודה היא הוראה הניתנת ל- LCD שמבצעת קבוצה של משימות מוגדרות מראש כמו אתחול, ניקוי המסך, הגדרת תנוחת הסמן, שליטה בתצוגה וכו '.
פנקס הנתונים שומר את הנתונים שיוצגו על גבי LCD. הנתונים הם ערך ASCII של התווים שיוצגו על גבי LCD.
הפעלת LCD נשלטת על ידי שתי פקודות. כאשר RS = 0, R / W = 1 הוא קורא את הנתונים וכאשר RS = 1, R / W = 0, הוא כותב (מדפיס) את הנתונים.
LCD משתמש בקודי הפקודה הבאים:

פקודות תצוגת LCD
תרשים מעגל:

ממשק LCD למיקרו-בקר
קוד מקור:
#לִכלוֹל
# הגדר קאם P0
sbit rs = P2 ^ 0
sbit rw = P2 ^ 1
sbit ב = P2 ^ 2
בטל lcd_initi ()
בטל lcd_dat (תו לא חתום)
בטל lcd_cmd (תו לא חתום)
עיכוב חלל (int חתום)
תצוגה בטלה (תווים ללא חתום, תו לא חתום)
ריק ראשי ()
{
lcd_initi ()
lcd_cmd (0x80)
עיכוב (100)
תצוגה ('EDGEFX TECHLNGS', 15)
lcd_cmd (0xc0)
תצוגה ('ערכות ופתרונות', 15)
בעוד (1)
}
תצוגה בטלה (תווים ללא חתום, תו לא חתום)
{
int חתום w
עבור (w = 0w
lcd_dat (s [w])
}
}
בטל lcd_initi ()
{
lcd_cmd (0x01)
עיכוב (100)
lcd_cmd (0x38)
עיכוב (100)
lcd_cmd (0x06)
עיכוב (100)
lcd_cmd (0x0c)
עיכוב (100)
}
בטל lcd_dat (char dat לא חתום)
{
מסרק = זה
rs = 1
rw = 0
ב = 1
עיכוב (100)
ב = 0
}
בטל lcd_cmd (cmd char לא חתום)
{
בא = cmd
rs = 0
rw = 0
ב = 1
עיכוב (100)
ב = 0
}
עיכוב חלל (int n לא חתום)
{
int חתום א
עבור (a = 0a
4. מעגל ממשק מנוע צעד

מנוע צעד חד קוטבי
ל מנוע צעדים הוא אחד המנוע הנפוץ ביותר לתנועה זוויתית מדויקת. היתרון בשימוש במנוע צעד הוא שניתן לשלוט במיקום הזוויתי של המנוע ללא כל מנגנון משוב. מנועי הצעד נמצאים בשימוש נרחב ביישומים תעשייתיים ומסחריים. הם משמשים בדרך כלל כמו במערכות כונן כגון רובוטים, מכונות כביסה וכו '.

מנוע צעד דו קוטבי
מנועי צעד יכולים להיות חד קוטביים או דו קוטביים וכאן אנו משתמשים במנוע צעד חד קוטבי. מנוע הצעד החד קוטבי מורכב משישה חוטים שמתוכם ארבעה מחוברים לסליל המנוע ושניים הם חוטים נפוצים. כל חוט משותף מחובר למקור מתח והחוטים הנותרים מחוברים למיקרו-בקר.
תרשים מעגל:

מעגל ממשק מנוע צעד
קוד מקור:
#לִכלוֹל
sbit a = P3 ^ 0
sbit b = P3 ^ 1
sbit c = P3 ^ 2
sbit d = P3 ^ 3
עיכוב ריק ()
ריק ראשי ()
{
בעוד (1)
{
a = 0
b = 1
c = 1
d = 1
לְעַכֵּב()
a = 1
b = 0
c = 1
d = 1
לְעַכֵּב()
a = 1
b = 1
c = 0
d = 1
לְעַכֵּב()
a = 1
b = 1
c = 1
d = 0
}
}
עיכוב ריק ()
{
char לא חתומה i, j, k
עבור (i = 0i<6i++)
עבור (j = 0j<255j++)
עבור (k = 0k<255k++)
}
5. ממשק לוח מקשים של מטריקס ל- 8051
תיאור:

לוח מקשים מטריקס
לוח המקשים הוא מכשיר קלט בשימוש נרחב עם יישומים רבים כגון טלפון, מחשב, כספומט, נעילה אלקטרונית וכו '. לוח המקשים משמש לקליטת קלט מהמשתמש לעיבוד נוסף. הנה לוח מקשים מטריצה 4 על 3 המורכב ממתגים המסודרים בשורות ועמודות התממשק למיקרו-בקר . LCD של 16 על 2 הוא גם ממשק להצגת הפלט.
הרעיון הממשק של לוח המקשים הוא פשוט מאוד. לכל מספר לוח מקשים מוקצים שני פרמטרים ייחודיים שהם שורה ועמודה (R, C). מכאן שבכל פעם שלוחצים על מקש המספר מזדהה על ידי זיהוי מספרי השורות והעמודות בלוח המקשים.

תרשים פנימי של לוח המקשים
בתחילה כל השורות מוגדרות לאפס ('0') על ידי הבקר והעמודות נסרקות כדי לבדוק אם לחוץ על מקש כלשהו. במקרה שלא לוחצים על מקש כלשהו הפלט של כל העמודות יהיה גבוה ('1').
תרשים מעגלים

ממשק לוח מקשים מטריציציאלי ל- 8051
קוד מקור:
#לִכלוֹל
# הגדר קאם P0
sbit rs = P2 ^ 0
sbit rw = P2 ^ 1
sbit ב = P2 ^ 2
sbit c1 = P1 ^ 4
sbit c2 = P1 ^ 5
sbit c3 = P1 ^ 6
sbit r1 = P1 ^ 0
sbit r2 = P1 ^ 1
sbit r3 = P1 ^ 2
sbit r4 = P1 ^ 3
בטל lcd_initi ()
בטל lcd_dat (תו לא חתום)
בטל lcd_cmd (תו לא חתום)
עיכוב חלל (int חתום)
תצוגה בטלה (תווים ללא חתום, תו לא חתום)
ריק ראשי ()
{
lcd_initi ()
lcd_cmd (0x80)
עיכוב (100)
תצוגה ('0987654321', 10)
בעוד (1)
}
תצוגה בטלה (תווים ללא חתום, תו לא חתום)
{
int חתום w
עבור (w = 0w
lcd_dat (s [w])
}
}
בטל lcd_initi ()
{
lcd_cmd (0x01)
עיכוב (100)
lcd_cmd (0x38)
עיכוב (100)
lcd_cmd (0x06)
עיכוב (100)
lcd_cmd (0x0c)
עיכוב (100)
}
בטל lcd_dat (char dat לא חתום)
{
מסרק = זה
rs = 1
rw = 0
ב = 1
עיכוב (100)
ב = 0
}
בטל lcd_cmd (cmd char לא חתום)
{
בא = cmd
rs = 0
rw = 0
ב = 1
עיכוב (100)
ב = 0
}
עיכוב חלל (int n לא חתום)
{
int חתום א
עבור (a = 0a
}
אנו מקווים שהצלחנו לספק ידע רב אודות מעגלי הממשק הבסיסיים אך החשובים מיקרו-בקר 8051 . אלה המעגלים הבסיסיים ביותר הנדרשים בכל יישום מערכת משובץ ואנו מקווים שסיפקנו לך תיקון טוב.
שאילתה או משוב נוסף הקשורים לנושא זה מוזמנים להזכיר בסעיף ההערות למטה.
נקודות זיכוי
- מיקרו-בקר 8051 התקנים היקפיים מאת aninditadhikary
- תצוגה בת 7 קטעים מאת אלקטרוניסטיצ'ר
- תצורות תצוגת 7 מגזרים מאת מגרש הלימוד
- תצוגת LCD מאת bp.blogspot
- סטפרים חד קוטביים דו קוטביים מאת מהנדס מוסך
- מקש מטריקס מאת וטקו
- תרשים פנימי של לוח המקשים מאת bp.blogspot








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}