דוֹפֶק וויסות (PM) הוא סוג אחד של אפנון שבו האות מועבר בצורת דופק. בסוג זה של אפנון, אותות רציפים נדגמים במרווחים נורמליים, ולכן טכניקת אפנון זו משמשת להעברת מידע אנלוגי. אפנון דופק מסווג לשני סוגים אפנון אנלוגי ו אפנון דיגיטלי . אפנון אנלוגי מסווג לשלושה סוגים PAM, PWM ו-PPM ואילו אפנון דיגיטלי מסווג לקוד דופק ואפונון דלתא. אז מאמר זה דן בסקירה כללית של אחד מסוגי אפנון הדופק, כלומר - אפנון מיקום הדופק תיאוריה או PPM.
מהו אפנון מיקום הדופק?
אפנון מיקום דופק הוא סוג אחד של אפנון אנלוגי המאפשר וריאציה בתוך מיקום הפולסים בהתבסס על משרעת האות המאפנן שנדגם נקרא PPM או Pulse Position Modulation. בסוג זה של אפנון, המשרעת והרוחב של הפולסים נשמרים יציבים ומיקום הפולסים רק מגוונים.
טכניקת ה-PPM מאפשרת למחשבים להעביר נתונים פשוט על ידי מדידת הזמן שלוקח להגיע לכל חבילת נתונים למחשב. כך נעשה שימוש תכוף בתקשורת אופטית שבה יש הפרעות מרובות מסלולים קטנות. אפנון זה משדר לחלוטין אותות דיגיטליים ולא ניתן להשתמש בו על ידי מערכות אנלוגיות. הוא משדר נתונים פשוטים שאינם יעילים בזמן העברת קבצים.
כדי לדעת יותר על ההבדל בין PPM, PWM ו-PAM לחץ כאן
תרשים בלוקים של אפנון מצב דופק
תרשים בלוק אפנון מיקום הדופק מוצג להלן אשר יוצר אות PPM. אנו יודעים שאות אפנון מיקום דופק נוצר בקלות באמצעות אות PWM. אז, כאן ב-o/p של המשווה, הנחנו שכבר נוצר אות PWM ועכשיו עלינו להפיק אות PPM.
בתרשים הבלוק לעיל, אות PAM נוצר מהמאפנן פעם אחת, ובהמשך, הוא מעובד במשוואה כדי לייצר אות PWM. לאחר מכן, הפלט של המשווה ניתן למולטי ויברטור מונו-יציב שמופעל קצה שלילי. לפיכך, עם הקצה האחורי של אות PWM, הפלט של המונו-יציב הולך גבוה.

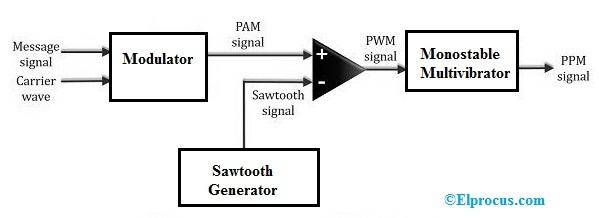
לפיכך, פעימה של אות PPM מתחילה בקצה האחורי של אות PWM. כאן, יש לציין כי משך הפלט הגבוה תלוי בעיקר ברכיבי ה-RC של המולטיוויברטור. אז זו הסיבה העיקרית לכך שדופק רוחב יציב מושג במקרה של אות PPM.
הקצה האחורי של אות ה-PWM עובר דרך האות המאפנן, ולכן עם ההסטה הזו, הפולסים של PPM יציגו שינויים בתוך מיקומו. ייצוג צורת הגל של אות PPM מוצג להלן.
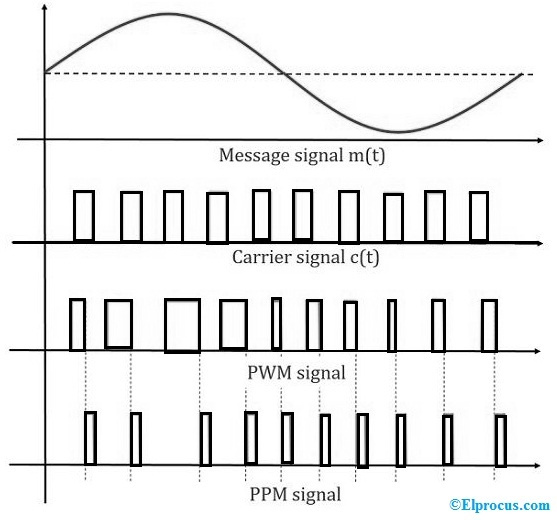
בצורת הגל שלעיל של אפנון מיקום הדופק, צורת הגל הראשונה היא אות ההודעה, האות השני הוא אות נושא והאות השלישי הוא אות PWM. אות זה נחשב להתייחסות ליצירת אות PPM כפי שמוצג בתרשים האחרון. בצורות הגל לעיל, אנו יכולים להבחין כי נקודת הסיום של דופק ה-PWM טוב כמו ה נקודת ההתחלה של דופק ה-PPM הוא חופף, אשר מוצג עם הקו המקווקו.
זיהוי של אפנון מיקום הדופק
הזיהוי של דיאגרמת בלוק אפנון מיקום הדופק מוצג להלן. בתרשים הבלוק הבא, אנו יכולים לראות שהוא כולל מחולל דופק, SR FF, מחולל דופק ייחוס ומפזר PWM.
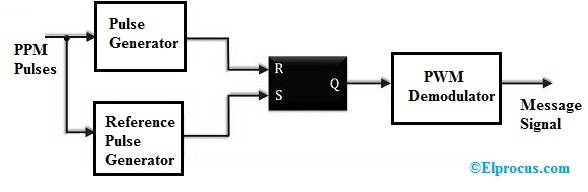
אות ה-PPM אשר משודר ממעגל האפנון יתעוות עם הרעש לאורך השידור. אז האות המעוות הזה יגיע למעגל הדמודולטור. מחולל הפולסים המשמש במעגל זה יפיק צורת גל פועם עם משך זמן קבוע. צורת גל זו ניתנת לפין האיפוס של ה-SR FF. מחולל פעימות הייחוס מייצר פולס ייחוס עם תקופה קבועה ברגע שניתן לו אות PPM משודר. אז דופק ההתייחסות הזה מנוצל להגדרת ה-SR FF. ביציאה של ה-FF, אותות ההגדרה והאיפוס הללו ייצרו אות PWM. יתר על כן, אות זה מעובד כדי לתת את אות ההודעה המקורית.
כיצד פועלת אפנון מיקום הדופק?
אפנון מיקום הדופק (PPM) פשוט פועל על ידי העברת פולסים חשמליים, אופטיים או אלקטרומגנטיים למחשב/מכשיר אחר כדי להעביר נתונים פשוטים. אז הוא צריך ששני המכשירים יהיו מתואמים לשעון דומה כדי שיפענח את הנתונים על סמך פעם שהפולסים שודרו. לחילופין, צורה אחת נוספת של PPM הנקראת אפנון מיקום דופק דיפרנציאלי מאפשרת לקודד את כל האותות בהתאם לחוסר הדמיון בין זמני השידור. המשמעות היא שמכשיר קולט צריך לפקח רק על השונות בזמני הגעה כדי לפענח שידור.
מעגל אפנון מצב דופק
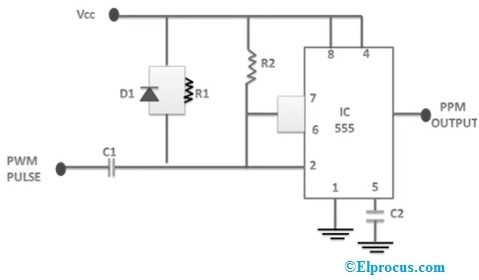
בדרך כלל ב-PPM, המשרעת והרוחב של הפולסים נשמרים יציבים בעוד שהסידור של כל פולס בהתייחסות למיקום דופק הייחוס משתנה בהתבסס על הערך הנדגם המיידי של האות המאפנן. תרשים המעגל של אפנון מיקום הדופק עם טיימר 555 מוצג להלן.
ניתן לבנות מעגל זה עם רכיבים אלקטרוניים שונים כמו 555 טיימר IC , נגדים R1 ו-R2, קבלים כמו C2 ו-C3, ו דיודה ד1. תן את החיבורים לפי המעגל המופיע להלן.
בעיקרון, ה 555 IC הוא IC מונוליטי הזמין באריזת DIP של 8 פינים. הוא משמש ביישומים רבים המשמשים כ- מולטי ויברטור אסטטי ו מולטי ויברטור ביציב ליצור את הגל המשולש, הגל המרובע וכו'. לכן, יצירת PPM נחשב גם לאחד מהיישומים של 555 IC.
בואו נראה כיצד אות ה-PPM נוצר באמצעות מעגל ה-PPM שלמעלה עם 555 IC. עבור דור של פולסים PWM ו-PPM, טיימר 555 פועל במצב מונו-יציב. מצב מונוסטי הוא אחד המצבים של מולטי ויברטורים. מולטיוויברטורים הם בדרך כלל מעגלים אלקטרוניים שאין להם מצב אחד או שניים יציבים. בהתבסס על המצבים היציבים, ישנם שלושה סוגים מולטיוויברטורים יציבים, בי-יציבים ומונו-יציבים.
פולס ה-PWM של הקלט מופעל על פין 2 של 555 כניסות מופעלות דמויות IC דרך רשת מבדלת שנוצרה על ידי דיודה D1, נגד R וקבל C1. כעת בהתבסס על הקלט שהתקבל ב-pin2, הפלט יתקבל ב-pin3 של 555 טיימר IC. הפלט יישאר גבוה למשך פרק הזמן שנקבע על ידי הנגדים R2 ו-C2 כך שהרוחב והמשרעת של כל פולס יישארו קבועים ונקבל אות PPM במוצא.
בדרך זו, IC טיימר 555 משמש להפקת אות PPM.
יתרונות
ה היתרונות של אפנון מיקום הדופק כלול את הבאים.
- ל-PPM יש את יעילות ההספק הגבוהה ביותר בהשוואה לאפנולים אחרים.
- לאפונון זה יש הפרעות רעש משרעת פחות יציבה.
- אפנון זה מפריד בקלות בין האות לאות רועש.
- זה צריך פחות כוח בהשוואה ל-PAM.
- ההפרדה בין אות ורעש היא פשוטה ביותר
- יש לו תפוקת כוח משודר קבוע.
- טכניקה זו היא פשוטה לחלק את האות לאות רועש.
- זה צריך פחות כוח בהשוואה ל-PAM ו-PDM בגלל משרעת ודופק קצר.
- הסרת רעשים קלה והפרדה קלה במיוחד בסוג זה של אפנון.
- ניצול החשמל הוא גם נמוך מאוד בהשוואה לאפנולים אחרים בגלל משרעת ורוחב פולסים יציבים.
- PPM מתקשר רק פקודות פשוטות מ-Tx ל-Rx, ולכן הוא משמש לעתים קרובות ביישומים קלים בגלל צרכי המערכת הנמוכים שלו.
חסרונות
ה החסרונות של אפנון מיקום הדופק כלול את הבאים.
- PPM הוא מאוד מורכב.
- זה צריך יותר רוחב פס לשידור בהשוואה ל-PAM.
- הוא רגיש ביותר להפרעות מרובי מסלולים כמו הדים שיכולים להפריע לשידור על ידי שינוי ההבדל בזמני ההגעה של כל אות.
- יש צורך בסנכרון בין משדר למקלט שאינו בר ביצוע בכל פעם ואנו דורשים ערוץ ייעודי עבורו.
- נדרשים מכשירים מיוחדים עבור אפנון מסוג זה.
יישומים
ה יישומים של אפנון מיקום הדופק כלול את הבאים.
- ה-PPM משמש בעיקר במערכות תקשורת ומערכות בקרת תעבורה אווירית.
- אפנון זה משמש בבקרת רדיו, מערכת תקשורת אופטית ויישומים צבאיים.
- טכניקה זו משמשת במטוסים, במכוניות בשלט רחוק, ברכבות וכו'.
- נעשה שימוש ב-PPM בזיהוי לא קוהרנטי בכל מקום שבו מקלט אינו דורש לולאת נעילת פאזה או PLL כדי לעקוב אחר השלב של הספק.
- הוא משמש בתקשורת RF (תדר רדיו).
- הוא משמש גם בכרטיסים חכמים בתדר גבוה ללא מגע, תגי זיהוי בתדר רדיו וכו'.
לפיכך, מדובר בסך הכל סקירה כללית של אפנון מיקום הדופק - עבודה ויישומיה. הנה שאלה בשבילך, מהי PWM ?