בתקופה של 18הבמאה עצמה, הייתה התפתחות מנועי DC. הפיתוח של מנועי DC השתפר באופן נרחב והם מיושמים באופן משמעותי במספר תעשיות. בתקופה המוקדמת של המאה ה -19 ועם השיפורים שבוצעו בשנת 1832, מנועי DC פותחו בתחילה על ידי החוקר הבריטי סטרג'ון. הוא המציא את סוג הקומוטטור הראשוני של מנוע DC שבו יש לו יכולת לדמות גם מכונות. אבל אפשר לתהות מה הפונקציונליות של מנוע DC ולמה חשוב לדעת על בקרת מהירות המנוע DC. לכן, מאמר זה מסביר בבירור את פעולתו וטכניקות שונות לבקרת מהירות.
מהו מנוע DC?
מנוע DC מופעל באמצעות זרם ישר שבו הוא הופך את האנרגיה החשמלית המתקבלת לאנרגיה מכנית. זה מביא לשינוי סיבובי במכשיר עצמו ובכך מספק כוח להפעלת יישומים שונים בתחומים מרובים.
בקרת מהירות מנוע DC היא אחת התכונות השימושיות ביותר של המנוע. על ידי שליטה על מהירות המנוע, תוכלו לשנות את מהירות המנוע בהתאם לדרישות ותוכלו לקבל את הפעולה הנדרשת.
מנגנון בקרת המהירות ישים במקרים רבים כמו שליטה בתנועת כלי רכב רובוטיים, תנועת מנועים בבתי נייר ותנועת מנועים במעליות שבהם סוגים שונים של מנועי DC משומשים.
עקרון העבודה של DC Motor
מנוע DC פשוט עובד על העיקרון שכאשר מוליך מוליך זרם מונח בתוך נאמן מגנטי ד, הוא חווה כוח מכני. במנוע DC מעשי, האבזור הוא המוליך הנושא את הזרם והשדה מספק שדה מגנטי.
כאשר המוליך (האבזור) מסופק עם זרם, הוא מייצר שטף מגנטי משלו. השטף המגנטי מצטבר לשטף המגנטי עקב פיתולי השדה בכיוון אחד או מבטל את השטף המגנטי עקב פיתולי שדה. הצטברות השטף המגנטי בכיוון אחד בהשוואה לכיוון השני מפעילה כוח על המוליך, ולכן היא מתחילה להסתובב.
על פי חוק האינדוקציה האלקטרומגנטית של פאראדיי, פעולת הסיבוב של המוליך מייצרת EMF . EMF זה, על פי חוק לנץ, נוטה להתנגד לסיבה, כלומר למתח המסופק. לפיכך, למנוע DC יש מאפיין מיוחד מאוד של התאמת מומנטו במקרה של עומס משתנה עקב EMF האחורי.
מדוע בקרת מהירות מנוע DC חשובה?
בקרת מהירות במכונה מראה השפעה על מהירות הסיבוב של המנוע כאשר השפעה ישירה זו על פונקציונליות המכונה וחשובה כל כך לביצועים ולתוצאות הביצועים. בזמן הקידוח, לכל סוג חומר יש מהירות סיבוב משלו והוא משתנה גם על פי גודל המקדחה.
בתרחיש של התקנות משאבות יחול שינוי בקצב התפוקה ולכן מסוע צריך להיות מסונכרן עם המהירות התפקודית של המכשיר. גורמים אלה מגיעים תלויים באופן ישיר או עקיף במהירות המנוע. מסיבה זו, יש לשקול מהירות מנוע DC ולבחון סוגים שונים של שיטות בקרת מהירות.
בקרת מהירות המנוע DC נעשית באופן ידני על ידי העובד או באמצעות כלי בקרה אוטומטי כלשהו. נראה שזה עומד בניגוד להגבלת מהירות שבה חייבת להיות ויסות מהירות המתנגד לשינוי הטבעי במהירות בגלל השונות בעומס הפיר.
עקרון בקרת המהירות
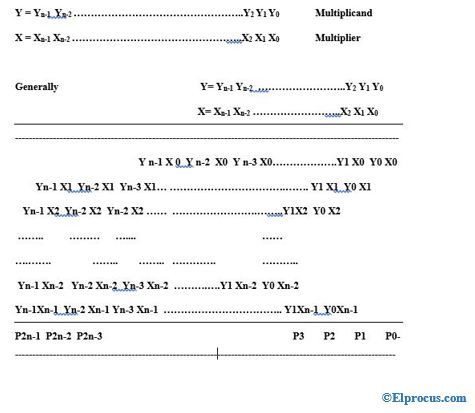
מהאיור לעיל, משוואת המתח של פשוט מנוע DC הוא
V = Eb + IaRa
V הוא המתח המסופק, Eb הוא ה- EMF האחורי, Ia הוא זרם האבזור, ו- Ra הוא התנגדות האבזור.
אנחנו כבר יודעים את זה
Eb = (PøNZ) / 60A.
P - מספר הקטבים,
A - קבוע
Z - מספר מוליכים
N- מהירות המנוע
החלפת הערך של Eb במשוואת המתח, נקבל
V = (PøNZ) / 60A) + IaRa
או, V - IaRa = (PøNZ) / 60A
כלומר, N = (PZ / 60A) (V - IaRa) / ø
ניתן לכתוב את המשוואה לעיל כ:
N = K (V - IaRa) / ø, K הוא קבוע
זה מרמז על שלושה דברים:
- מהירות המנוע פרופורציונלית ישירות למתח האספקה.
- מהירות המנוע ביחס הפוך לירידת מתח האבזור.
- מהירות המנוע ביחס הפוך לשטף עקב ממצאי השדה
לפיכך, ניתן לשלוט על מהירות מנוע DC בשלוש דרכים:
- על ידי שינוי מתח האספקה
- על ידי שינוי השטף, ועל ידי שינוי הזרם דרך השדה המתפתל
- על ידי שינוי מתח האבזור ועל ידי שינוי התנגדות האבזור
טכניקות מרובות של בקרת מהירות מנוע DC
מכיוון שיש שני סוגים של מנועי DC, כאן נדון בבירור בשיטות בקרת המהירות הן של סדרות DC והן של מנועי שאנט.
בקרת מהירות מנוע DC בסוגי סדרות
ניתן לסווג אותו לשני סוגים ואלה:
- טכניקה נשלטת אבזור
- טכניקה מבוקרת בשטח
הטכניקה מבוקרת האבזור מסווגת עוד לשלושה סוגים
- התנגדות מבוקרת אבזור
- בקרת אבזור מונעת
- מתח מסוף אבזור
התנגדות מבוקרת אבזור
טכניקה זו משמשת באופן נרחב ביותר כאשר לעמידות המווסתת יש קשר סדרתי לזה של אספקת המנוע. התמונה למטה מסבירה זאת.

בקרת התנגדות אבזור
ניתן להתעלם מאובדן הכוח שקורה בהתנגדות השליטה של המנוע בסדרת DC מכיוון שטכניקת ויסות זו משמשת בעיקר לתקופה ארוכה על מנת להקטין את המהירות בזמן תרחישי העמסת האור. זוהי טכניקה חסכונית למומנט מתמשך ומיושמת בעיקר במנופים, רכבות ורכבים אחרים.
בקרת אבזור מתנודדת
כאן, הריאוסטט יהיה בשני הסדרות וגם בקשר ההמתנה עם האבזור. יהיה שינוי ברמת המתח המופעלת על האבזור וזה משתנה על ידי שינוי הסדרה רֵיאוֹסטָט . בעוד שהשינוי בזרם העירור מתרחש על ידי שינוי הריאוסטט. טכניקה זו של בקרת מהירות במנוע DC אינה יקרה כל כך בגלל הפסדי כוח משמעותיים בהתנגדות לוויסות מהירות. ניתן לווסת את המהירות במידה מסוימת אך לא מעל לרמת המהירות הרגילה.

שיטת בקרת מהירות מנוע DC משוריינת
מתח מסוף אבזור
המהירות של מנוע מסדרת DC יכולה להיעשות גם באמצעות אספקת חשמל למנוע באמצעות מתח אספקה מגוון, אך גישה זו יקרה ולא מיושמת בהרחבה.
הטכניקה הנשלטת בשטח מסווגת עוד לשני סוגים:
- מפנה שדה
- שליטה בשדה טפח (בקרת שדה טפח)
טכניקת הסטת שדה
טכניקה זו עושה שימוש בסטרטור. ניתן להפחית את קצב הזרימה על פני השדה על ידי מעבר חלק מהזרם המנוע לאורך שדה הסדרה. ככל שהתנגדות הסוטה פחותה, זרם השדה פחות. טכניקה זו משמשת לטווח מהירויות רגיל יותר ומיושמת על פני כוננים חשמליים כאשר המהירות עולה כאשר יש ירידה בעומס.

בקרת מהירות מנוע מנוע DC
שליטה בשדה טפח
גם כאן, עם הפחתת השטף, המהירות תוגדל והיא מושגת על ידי צמצום סיבובי השדה המתפתחים מהמקום בו זרימת הזרם מתרחשת. הנה, מוציאים את מספר הקשות בשדה המתפתל וטכניקה זו משמשת במתיחות חשמליות.
בקרת מהירות של מנוע שאנט DC
ניתן לסווג אותו לשני סוגים ואלה:
- טכניקה מבוקרת בשטח
- טכניקה נשלטת אבזור
שיטת בקרת שדה עבור מנוע שאנט DC
בשיטה זו, השטף המגנטי עקב פיתולי השדה משתנה על מנת לשנות את מהירות המנוע.
מכיוון שהשטף המגנטי תלוי בזרם הזורם דרך השדה המתפתל, ניתן לשנותו באמצעות שינוי הזרם דרך השדה המתפתל. ניתן להשיג זאת באמצעות נגד משתנה בסדרה עם הנגד המתפתל בשדה.
בתחילה, כאשר הנגד המשתנה נשמר במצבו המינימלי, הזרם המדורג זורם דרך השדה המתפתל עקב מתח אספקה מדורג, וכתוצאה מכך המהירות נשמרת תקינה. כאשר ההתנגדות מוגברת בהדרגה, הזרם דרך סלילת השדה פוחת. זה בתורו מקטין את השטף המיוצר. לפיכך, מהירות המנוע עולה מעל לערכו הרגיל.
שיטת בקרת התנגדות אבזור למנוע DC Shunt
בשיטה זו ניתן לשלוט על מהירות מנוע DC על ידי שליטה בהתנגדות האבזור כדי לשלוט על ירידת המתח על פני האבזור. שיטה זו משתמשת גם בנגד משתנה בסדרה עם האבזור.
כאשר הנגד המשתנה מגיע לערכו המינימלי, התנגדות האבזור היא נורמלית, ולכן מתח האבזור יורד. כאשר ערך ההתנגדות גדל בהדרגה, המתח על פני האבזור פוחת. זה בתורו מוביל לירידה במהירות המנוע.
שיטה זו משיגה את מהירות המנוע מתחת לטווח הרגיל שלה.
שיטת בקרת מתח אבזור עבור מנוע שאנט DC (שיטת וורד לאונרד)
טכניקת וורד לאונרד של מעגל בקרת מהירות מנוע DC מוצג כדלקמן:
בתמונה לעיל, M הוא המנוע הראשי שבו יש לווסת את מהירותו ו- G תואם לגנרטור DC נרגש בנפרד, כאשר זה מונע באמצעות מנוע תלת פאזי והוא עשוי להיות ממנוע סינכרוני או אינדוקציה. דפוס זה של גנרטור DC ושילוב מנוע מונע AC נקרא כסט M-G.
מתח הגנרטור משתנה על ידי שינוי זרם השדה של הגנרטור. רמת מתח זו כאשר היא מסופקת לחלק האבזור של מנוע DC ואז M היא מגוונת. על מנת לשמור על שטף השדה המנוע קבוע, יש לשמור על זרם השדה המוטורי כקבוע. כאשר מהירות המנוע מווסתת, אז זרם האבזור של המנוע יהיה זהה לזה של הרמה המדורג.
זרם השדה המועבר יהיה שונה כך שרמת האבזור של המתח משתנה בין '0' לרמה המדורג. כיוון שוויסות המהירות תואם את הזרם המדורג ועם שטף השדה המתמשך של המנוע ושטף השדה עד מתי מושגת המהירות המדורג. וכפי שהכוח הוא תוצר של מהירות ומומנט ויש לו פרופורציה ישירה למהירות. עם זאת, כאשר יש תוספת בכוח, המהירות עולה.
שתי השיטות הנ'ל אינן יכולות לספק בקרת מהירות בטווח הרצוי. יתר על כן, שיטת בקרת השטף יכולה להשפיע על מעבר, ואילו שיטת בקרת האבזור כרוכה באובדן כוח עצום עקב השימוש בה נגד בסדרה עם האבזור. לכן, לעתים קרובות רצויה שיטה אחרת - זו השולטת על מתח האספקה כדי לשלוט על מהירות המנוע.
כתוצאה מכך, בטכניקת וורד לאונרד, כונן ההספק המתכוונן והערך הקבוע של המומנט נרכשים מרמת המהירות המינימלית ועד לרמת מהירות הבסיס. טכניקת ויסות שטף השדה משמשת בעיקר כאשר רמת המהירות גבוהה מזו של מהירות הבסיס.
כאן, בפונקציונליות, זרם האבזור נשמר ברמה קבועה בערך שצוין וערך המתח של הגנרטור נשמר על קבוע. בשיטה כזו, סלילת השדה מקבלת מתח קבוע, והאבזור מקבל מתח משתנה.
טכניקה אחת כזו של שיטת בקרת המתח כוללת שימוש במנגנון מתג כדי לספק מתח משתנה לאבזור, והשנייה משתמשת בגנרטור מונע זרם חילופין כדי לספק מתח משתנה לאבזור ( מערכת ורד-לאונרד ).
ה היתרונות והחסרונות של המחלקה לאונרד מטו d הם:
היתרונות של שימוש בטכניקת וורד לאונרד לבקרת מהירות מנוע DC הם כדלקמן:
- בשני הכיוונים, ניתן לשלוט על מהירות המכשיר בצורה חלקה לטווח מורחב
- לטכניקה זו יכולת בלימה מהותית
- וולט-אמפר התגובתי הנגרר מאוזן באמצעות כונן והמנוע הסינכרוני הנרגש במיוחד משמש ככונן כך שתהיה תוספת בגורם ההספק.
- כשיש עומס מהבהב, מנוע הכונן הוא ה- מנוע אינדוקציה בעל גלגל תנופה המשמש להפחתת העומס המהבהב לרמה מינימלית
החסרונות של טכניקת וורד לאונרד הם:
- מכיוון שמכיוון שלטכניקה זו יש סט של מנוע וגנרטור, העלות היא יותר
- המכשיר מורכב לעיצוב ויש לו גם משקל כבד
- צריך יותר מקום להתקנה
- דורש תחזוקה שוטפת וביסוס אינו משתלם
- יהיו הפסדים עצומים ולכן יעילות המערכת מופחתת
- נוצר יותר רעש
וה יישום שיטת וורד לאונרד הוא שליטה חלקה על המהירות במנוע DC. כמה מהדוגמאות הן מנופי מוקשים, טחנות נייר, מעליות, טחנות גלגול ומנופים.
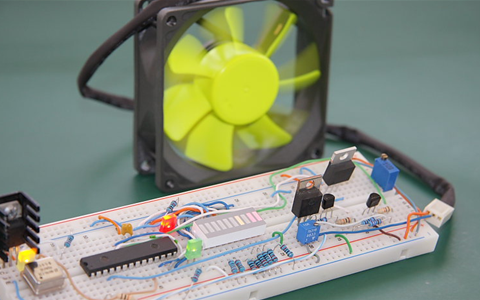
מלבד שתי הטכניקות הללו, הטכניקה הנפוצה ביותר היא בקרת מהירות של מנוע DC באמצעות PWM כדי להשיג בקרת מהירות של מנוע DC. PWM כולל יישום של פעימות רוחב משתנות על נהג המנוע כדי לשלוט במתח המופעל על המנוע. שיטה זו מתגלה כיעילה מאוד מכיוון שאיבוד הכוח נשמר במינימום, והיא אינה כוללת שימוש בציוד מורכב כלשהו.

שיטת בקרת מתח
דיאגרמת הגוש לעיל מייצגת פשוט בקר מהירות מנוע חשמלי . כפי שמתואר בתרשים הבלוקים לעיל, מיקרו-בקר משמש להזנת אותות PWM לנהג המנוע. נהג המנוע הוא IC L293D המורכב ממעגלי גשר H להפעלת המנוע.
PWM מושגת על ידי שינוי הפולסים המופעלים על סיכת ההפעלה של נהג המנוע IC כדי לשלוט על המתח המופעל של המנוע. וריאציית הפולסים מתבצעת על ידי המיקרו-בקר, עם אות הקלט מכפתורי הלחיצה. כאן ניתנים שני לחצני כפתור, כל אחד להפחתה ולהגדלת מחזור הדופק.
לכן, מאמר זה נתן הסבר מפורט על טכניקות שונות של בקרת מהירות מנוע DC וכיצד חשוב לבחון בקרת מהירות. מומלץ גם לדעת על בקר מהירות המנוע DC 12V .








![בניית מעגל ממיר באק פשוט [המרה מטה]](https://electronics.jf-parede.pt/img/3-phase-power/D0/build-a-simple-buck-converter-circuit-step-down-converter-1.jpg)