
כמעט כל התפתחות מכנית שאנו רואים סביבנו מושגת על ידי מנוע חשמלי. מכונות חשמליות הן שיטה להמרת אנרגיה. מנועים לוקחים אנרגיה חשמלית ומייצרים אנרגיה מכנית. מנועים חשמליים משמשים להפעלת מאות מכשירים בהם אנו משתמשים בחיי היומיום. מנועים חשמליים מסווגים באופן כללי לשתי קטגוריות שונות: מנוע זרם ישר (DC) ומנוע זרם חילופין (AC). במאמר זה נדון במנוע DC ופועלו. וגם איך פועלים מנועי DC הילוכים.
מהו מנוע DC?
ל מנוע DC הוא מנוע חשמלי שפועל על כוח זרם ישר. במנוע חשמלי, הפעולה תלויה באלקטרומגנטיות פשוטה. מוליך נושא זרם מייצר שדה מגנטי, כאשר לאחר מכן הוא ממוקם בשדה מגנטי חיצוני, הוא יפגוש בכוח שמיוחד לזרם במוליך ולעוצמת השדה המגנטי החיצוני. זהו מכשיר הממיר אנרגיה חשמלית לאנרגיה מכנית. זה עובד על העובדה שמוליך נושא זרם הממוקם בשדה מגנטי חווה כוח שגורם לו להסתובב ביחס למקומו המקורי. מנוע DC מעשי מורכב מפיתולי שדה המספקים את השטף המגנטי והאבזור המשמש כמוליך.

מנוע DC ללא מברשות
הקלט של מנוע DC ללא מברשות הוא זרם / מתח וההספק שלו הוא מומנט. הבנת פעולתו של מנוע DC היא פשוטה מאוד מתרשים בסיסי שמוצג להלן. מנוע DC מורכב בעצם משני חלקים עיקריים. החלק המסתובב נקרא הרוטור והחלק הנייח נקרא גם סטאטור. הרוטור מסתובב ביחס לסטטור.
הרוטור מורכב מפיתולים, כאשר הפיתולים קשורים חשמלית לקומוטטור. הגיאומטריה של המברשות, מגעי הקומוטאטור ופיתולי הרוטור היא כזו שכאשר מפעילים כוח, הקוטביות של הסלילה המונעת ומגנטים הסטטוריים לא מיושרים והרוטור יסתובב עד שהוא מתיישר כמעט עם מגנטים השדה של הסטטור.
כשהרוטור מגיע ליישור, המברשות עוברות למגעי הקומוטטור הבאים וממריצות את המסלול הבא. הסיבוב הופך את כיוון הזרם דרך מתפתל הרוטור, מה שגורם לסיבוב של השדה המגנטי של הרוטור, ומניע אותו להמשיך להסתובב.
בניית מנוע DC
בניית מנוע DC מוצגת להלן. חשוב מאוד להכיר את העיצוב שלו לפני שיידע שהוא עובד. החלקים החיוניים במנוע זה כוללים אבזור וגם סטאטור.

מנוע DC
סליל האבזור הוא החלק המסתובב ואילו החלק הנייח הוא הסטטור. בכך, סליל האבזור מחובר לכיוון אספקת DC הכוללת את המברשות כמו גם את הקומוטטורים. עיקר תפקידם של המחלף הוא להמיר את AC ל- DC אשר מושרה העוגן. ניתן לספק את זרימת הזרם באמצעות המברשת מהחלק הסיבובי של המנוע לעומס החוץ הלא פעיל. סידור האבזור יכול להיעשות בין שני הקטבים של האלקטרומגנט או קבוע.
חלקי מנוע DC
במנועי DC קיימים עיצובים פופולאריים שונים של מנועים הזמינים כמו מגנט ללא מברשת, קבוע, סדרה, פצע מורכב, שנט, או שיבוש אחר. באופן כללי, החלקים של מנוע הספק זהים בעיצובים פופולריים אלה, אך כל פעולתו זהה. החלקים העיקריים של מנוע DC כוללים את הדברים הבאים.
גַלגַל מְכַוֵן
חלק נייח כמו סטטור הוא אחד החלקים בחלקי מנוע DC הכוללים את פיתולי השדה. התפקיד העיקרי של זה הוא להשיג את ההיצע.
רוטור
הרוטור הוא החלק הדינמי של המנוע המשמש ליצירת המהפכות המכניות של היחידה.
מברשות
מברשות המשתמשות בקומוטטור פועלות בעיקר כגשר לתיקון המעגל החשמלי הנייח לכיוון הרוטור.
קוֹמוּטָטוֹר
זוהי טבעת מפוצלת שתוכננה עם קטעי נחושת. זהו גם אחד החלקים החיוניים ביותר של מנוע הספק.
פיתולי שדה
פיתולים אלה מיוצרים עם סלילי שדה המכונים חוטי נחושת. פיתולים אלה סובבים בערך את החריצים המובילים דרך נעלי המוט.
פיתולי אבזור
בניית הפיתולים הללו במנוע DC היא שני סוגים כמו Lap & Wave.
עוֹל
מסגרת מגנטית כמו עול מעוצבת עם ברזל יצוק או פלדה לפעמים. זה עובד כמו שומר.
פולנים
מוטות במנוע כוללים שני חלקים עיקריים כמו ליבת המוט וכן נעלי מוט. חלקים חיוניים אלה מחוברים יחד באמצעות כוח הידראולי ומחוברים לעול.
שיניים / חריץ
ספינות החריץ שאינן מוליכות ננעצות לעיתים קרובות בין קירות החריץ וכן סלילים לבטיחות מאפס, תמיכה מכנית ובידוד חשמלי נוסף. החומר המגנטי בין החריצים נקרא שיניים.
דיור מנוע
בית המנוע נותן תמיכה למברשות, למסבים ולליבת הברזל.
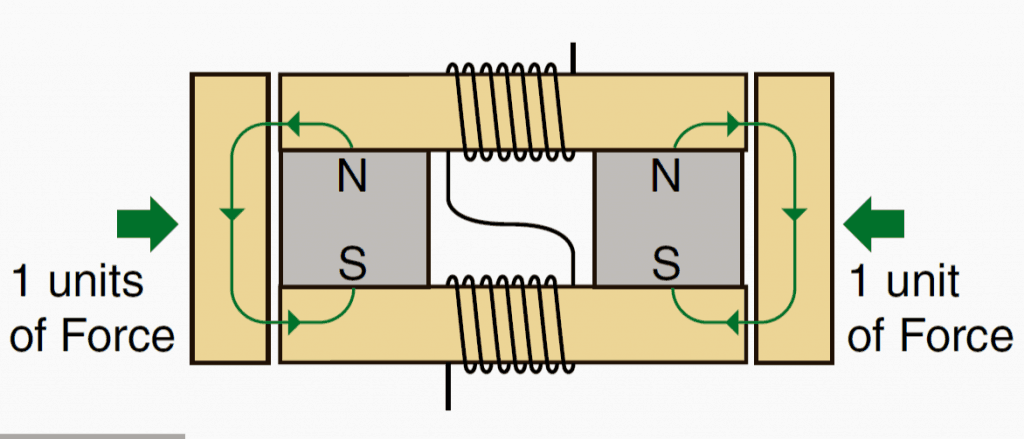
עקרון עבודה
מכונה חשמלית המשמשת להמרת האנרגיה מחשמל למכני מכונה מנוע DC. ה עקרון עבודה של מנוע DC הוא שכאשר מוליך נושא זרם נמצא בתוך השדה המגנטי, אז הוא חווה כוח מכני. ניתן להחליט על כיוון כוח זה באמצעות שלטונו השמאלי של פלמינג, כמו גם גודלו.
אם האצבע הראשונה מושטת, האצבע השנייה, כמו גם האגודל של יד שמאל, יהיו אנכיות זו לזו ואצבע ראשית מסמלת את כיוון השדה המגנטי, האצבע הבאה מסמנת את הכיוון הנוכחי והאגודל השלישית כמו האצבע מסמלת את כיוון כוח אשר נחווה דרך המוליך.
F = BIL ניוטונים
איפה,
'B' הוא צפיפות השטף המגנטי,
'אני' הוא עדכני
'L' הוא אורך המוליך בשדה המגנטי.
בכל פעם שניתנה מתפתל אבזור לכיוון אספקת DC, אז זרימת הזרם תוגדר בתוך הפיתול. מפותל שדה או מגנטים קבועים יספקו את השדה המגנטי. לכן, מוליכי אבזור יחוו כוח בגלל השדה המגנטי המבוסס על העיקרון שצוין לעיל.
הקומוטטור מתוכנן כמו קטעים להשגת מומנט חד כיווני או שדרך הכוח הייתה מתהפכת בכל פעם ברגע שדרך תנועת המוליך מתהפכת בתוך השדה המגנטי. אז זהו עקרון העבודה של מנוע DC.
סוגי מנועי DC
להלן נדון בסוגים השונים של מנועי הספק.
מנועי DC ממונעים
מנועי גיר נוטים להפחית את מהירות המנוע אך עם עלייה מומנט מתאימה. מאפיין זה שימושי, שכן מנועי DC יכולים להסתובב במהירות גבוהה מדי מכדי שהמכשיר האלקטרוני יוכל להשתמש בו. מנועי הילוכים מורכבים בדרך כלל ממנוע מברשת DC ותיבת הילוכים המחוברת לפיר. מנועים נבדלים כמכוונים על ידי שתי יחידות מחוברות. יש לו יישומים רבים בשל עלות העיצוב שלו, מפחית את המורכבות ובניית יישומים כגון ציוד תעשייתי, מפעילים, כלים רפואיים ורובוטיקה.
- לעולם לא ניתן לבנות רובוט טוב ללא הילוכים. כל הדברים הנחשבים, חשוב מאוד להבין היטב כיצד הילוכים משפיעים על פרמטרים כגון מומנט ומהירות.
- הילוכים עובדים על עקרון היתרון המכני. זה מרמז על ידי שימוש בקטרי הילוכים ייחודיים, אנו יכולים להחליף בין מהירות סיבוב ומומנט. לרובוטים אין יחס מהירות מומנט רצוי.
- ברובוטיקה, מומנט עדיף על מהירות. בעזרת הילוכים ניתן להחליף את המהירות הגבוהה עם מומנט טוב יותר. העלייה במומנט עומדת ביחס הפוך להפחתת המהירות.

מנועי DC ממונעים
הפחתת מהירות במנוע DC הילוך
הפחתת מהירות בהילוכים כוללת הילוך קטן המניע הילוך גדול יותר. יכולות להיות מעט סטים של ערכות הילוכים להפחתה אלה בתיבת הילוכים להפחתה.

הפחתת מהירות במנוע DC מכוון
לפעמים המטרה של שימוש במנוע הילוכים היא להפחית את מהירות הפיר המסתובבת של המנוע במכשיר המונע, למשל בשעון חשמלי קטן שבו המנוע הסינכרוני הזעיר עשוי להסתובב ב -1,200 סל'ד אולם יורד לסל'ד אחד לנהיגה. היד השנייה והופחת עוד יותר במנגנון השעון כדי להניע את מחוגי הדקה והשעה. כאן כמות הכוח המניע אינה רלוונטית כל עוד זה מספיק כדי להתגבר על השפעות החיכוך של מנגנון השעון.
מנוע DC סדרה
מנוע סדרה הוא מנוע מסדרת DC שבו סלילת שדה מחוברת באופן פנימי בסדרה לסיבוב האבזור. מנוע הסדרה מספק מומנט התחלתי גבוה אך לעולם אסור להריץ אותו ללא עומס והוא מסוגל להזיז עומסי פיר גדולים מאוד כאשר הוא מופעל לראשונה. מנועי סדרה ידועים גם כמנוע הפצוע בסדרה.
במנועי סדרה, פיתולי השדה משויכים לסדרה עם האבזור. עוצמת השדה משתנה עם התקדמות זרם האבזור. כאשר מהירותו מופחתת בעומס, מנוע הסדרה מקדם מומנט מצוין יותר. מומנט ההתחלה שלו הוא יותר מסוגים שונים של מנוע DC.
זה יכול גם להקרין ביתר קלות את החום שהצטבר בפיתול עקב כמות גדולה של זרם המובל. המהירות שלו עוברת במידה ניכרת בין עומס מלא ללא עומס. כאשר מסירים את העומס, מהירות המנוע עולה, והזרם דרך האבזור וסלילי השדה פוחת. הפעלת פריקה של מכונות גדולות מסוכנת.

סדרת מנועים
הזרם דרך האבזור וסלילי השדה פוחת, חוזק קווי השטף סביבם נחלש. אם חוזק קווי השטף סביב הסלילים היה מופחת באותו הקצב כמו הזרם שזורם דרכם, שניהם היו יורדים באותו הקצב ב
שמהירות המנוע עולה.
יתרונות
היתרונות של מנוע סדרתי כוללים את הדברים הבאים.
- מומנט התחלתי ענק
- בנייה פשוטה
- העיצוב קל
- התחזוקה קלה
- עלות תועלת
יישומים
מנועי הסדרה יכולים לייצר כוח סיבוב עצום, המומנט ממצב סרק. מאפיין זה הופך מנועי סדרה למתאימים למכשירי חשמל קטנים, ציוד חשמלי רב-תכליתי וכו 'מנועי סדרה אינם מתאימים כאשר יש צורך במהירות קבועה. הסיבה היא שמהירות מנועי הסדרה משתנה מאוד עם עומסים משתנים.
שאנט מוטור
מנועי Shunt הם מנועי DC Shunt, כאשר פיתולי השדה מוסטים אל או מחוברים במקביל לסיבוב האבזור של המנוע. המנוע DC shunt משמש בדרך כלל בגלל ויסות המהירות הטוב ביותר שלו. לפיכך, גם מתפתל האבזור וגם פיתולי השדה מוצגים לאותו מתח אספקה, אולם ישנם ענפים נפרדים לזרם זרם האבזור ולזרם השדה.
למנוע שנט יש מאפייני עבודה ייחודיים במקצת ממנוע סדרתי. מכיוון שסליל השדה המחודד עשוי מחוט דק, הוא אינו יכול לייצר זרם גדול להתחלה כמו שדה הסדרה. זה מרמז שלמנוע הציד יש מומנט התחלתי נמוך במיוחד, מה שמחייב שעומס הציר יהיה מעט למדי.

שאנט מוטור
כאשר מפעילים מתח על מנוע הציד, זורם כמות נמוכה מאוד של זרם דרך סליל השאנט. האבזור של מנוע הציד דומה למנוע הסדרה והוא ימשוך זרם לייצר שדה מגנטי חזק. בגלל האינטראקציה של השדה המגנטי סביב האבזור והשדה המיוצר סביב שדה המחלף, המנוע מתחיל להסתובב.
כמו מנוע הסדרה, כאשר האבזור יתחיל להסתובב הוא יפיק EMF בחזרה. ה- EMF האחורי יגרום לזרם באבזור להתחיל להצטמצם לרמה קטנה מאוד. כמות הזרם שתמשוך האבזור קשורה ישירות לגודל העומס כאשר המנוע מגיע למהירות מלאה. מכיוון שהעומס הוא בדרך כלל קטן, זרם האבזור יהיה קטן.
יתרונות
היתרונות של מנוע שאנט כוללים את הדברים הבאים.
- ביצועי בקרה פשוטים, וכתוצאה מכך רמת גמישות גבוהה לפתרון בעיות כונן מורכבות
- זמינות גבוהה, ולכן יש צורך במאמץ שירות מינימלי
- תאימות אלקטרומגנטית גבוהה
- ריצה חלקה מאוד, ולכן מתח מכני נמוך של המערכת הכוללת ותהליכי בקרה דינמיים גבוהים
- טווח בקרה רחב ומהירויות נמוכות, ולכן ניתן להשתמש בהם באופן אוניברסלי
יישומים
מנועי DC Shunt מתאימים מאוד ליישומים המונעים על ידי חגורה. מנוע במהירות קבועה זה משמש ביישומים תעשייתיים ורכביים כגון מכונות ומכונות מתפתלות / נפרדות בהן נדרשת מידה רבה של דיוק מומנט.
מנועי מתחם DC
מנועי מתח DC כוללים שדה שאנט נרגש בנפרד בעל מומנט התחלתי מצוין אולם הוא נתקל בבעיות ביישומי המהירות המשתנה. ניתן לחבר את השדה במנועים אלה בסדרה באמצעות האבזור, כמו גם שדה שאנט אשר נרגש בנפרד. שדה הסדרה נותן מומנט התחלתי מעולה ואילו שדה המחלף נותן ויסות מהירות משופר. עם זאת, שדה הסדרה גורם לבעיות בקרה ביישומים של כונן מהירות משתנה ובדרך כלל אינו משמש בכוננים בעלי ארבע רבעים.
נרגש בנפרד
כפי שהשם מרמז, סלילי השדה אחרת סלילים מפעילים אנרגיה באמצעות מקור DC נפרד. העובדה הייחודית של מנועים אלה היא שזרם האבזור אינו מספק בכל פיתולי השדה, מכיוון שמתפתל השדה מתחזק ממקור זרם זרם זרם חיצוני נפרד. משוואת המומנט של מנוע DC היא Tg = Ka φ Ia, במקרה זה, המומנט משתנה באמצעות שינוי השטף המוגדר 'φ' וללא תלות בזרם האבזור 'Ia'.
מתרגש מעצמו
כפי שהשם מרמז, בסוג זה של מנוע, ניתן לספק את הזרם בתוך הפיתולים דרך המנוע אחרת במכונה עצמה. יתר על כן, מנוע זה מופרד לסדרה הפצועה והמנוע הפצוע.
מנוע DC קבוע למגנט
מנוע ה- PMDC או מנוע DC קבוע כולל מתפתל אבזור. מנועים אלה מתוכננים במגנטים קבועים על ידי הצבתם בשוליים הפנימיים של ליבת הסטטור ליצירת שטף השדה. מצד שני, הרוטור כולל אבזור DC קונבנציונאלי כולל מברשות וקטעי קומוטטור.
במנוע DC מגנט קבוע ניתן ליצור את השדה המגנטי באמצעות מגנט קבוע. לכן, זרם הקלט אינו משמש ל עירור המשמש למזגנים, מגבים, מנעולים לרכב וכו '.
חיבור מנוע DC עם מיקרו-בקר
מיקרו-בקרים לא יכולים להניע את המנועים ישירות. אז אנחנו צריכים איזה נהג שישלוט במהירות ובכיוון של מנועים. נהגי המנוע ישמשו כמכשירי ממשק בין מיקרו-בקרים ומנועים . נהגי מנוע ישמשו כמגברי זרם מכיוון שהם לוקחים אות בקרת זרם נמוך ומספקים אות זרם גבוה. אות זרם גבוה זה משמש להנעת המנועים. שימוש בשבב L293D הוא דרך קלה לשליטה במנוע באמצעות מיקרו-בקר. הוא מכיל שני מעגלי נהג גשר H פנימית.
שבב זה נועד לשלוט בשני מנועים. ל- L293D שתי קבוצות של סידורים כאשר קבוצה אחת כוללת קלט 1, קלט 2, פלט 1, פלט 2, עם סיכת הפעלה ואילו קבוצה אחרת כוללת קלט 3, קלט 4, פלט 3, פלט 4 עם סיכת הפעלה אחרת. הנה סרטון הקשור ל- L293D
הנה דוגמה למנוע DC שמממשק למיקרו בקר L293D.

מנוע DC התממשק למיקרו-בקר L293D
ל- L293D שתי קבוצות של סידורים כאשר קבוצה אחת כוללת קלט 1, קלט 2, פלט 1 ופלט 2 וערכה אחרת כוללת קלט 3, קלט 4, פלט 3 ופלט 4, על פי התרשים לעיל,
- אם סיכה מספר 2 ו -7 גבוהה אז סיכה מספר 3 ו -6 גבוהה גם כן. אם הפעלה 1 ומספר 2 הם גבוהים ומשאירים מספר 7 נמוך אז המנוע מסתובב בכיוון קדימה.
- אם הפעלה 1 ומספר 7 הם גבוהים ומשאירים מספר 2 נמוך אז המנוע מסתובב בכיוון ההפוך.
כיום מנועי זרם זרם עדיין נמצאים ביישומים רבים קטנים כמו צעצועים וכונני דיסקים או בגדלים גדולים להפעלת בתי חרושת פלדה ומכונות נייר.
משוואות מנוע DC
גודל השטף שחווה הוא
F = BlI
איפה, B- צפיפות שטף עקב שטף המיוצר על ידי פיתולי שדה
אורך האורך של המוליך
זרם אני העובר דרך המנצח
כאשר המוליך מסתובב, גורם ל EMF שפועל בכיוון ההפוך למתח המסופק. זה ניתן כ

איפה, Ø- פלוז בגלל פיתולי השדה
P- מספר מוטות
קבוע A-A
N - מהירות המנוע
Z- מספר מוליכים
מתח האספקה, V = Eב+ אנילרל
המומנט שפותח הוא
 לפיכך המומנט עומד ביחס ישר לזרם האבזור.
לפיכך המומנט עומד ביחס ישר לזרם האבזור.
כמו כן, המהירות משתנה עם זרם האבזור, ולכן בעקיפין המומנט והמהירות של המנוע תלויים זה בזה.
עבור מנוע שאנט DC, המהירות נשארת כמעט קבועה גם אם מומנט עולה מאין עומס לעומס מלא.
עבור מנוע מסדרת DC המהירות פוחתת ככל שה מומנט גדל מאין עומס לעומס מלא.
כך ניתן לשלוט על המומנט על ידי שינוי המהירות. בקרת מהירות מושגת על ידי
- שינוי שטף באמצעות שליטה על הזרם באמצעות סלילה בשדה - שיטת בקרת שטף. בשיטה זו, המהירות נשלטת מעל המהירות המדורג שלה.
- בקרת מתח אבזור - מספקת בקרת מהירות מתחת למהירות הרגילה שלה.
- בקרת מתח אספקה - מספקת בקרת מהירות לשני הכיוונים.
4 מבצע רביע
באופן כללי, מנוע יכול לפעול בארבעה אזורים שונים. ה הפעלה של ארבע-רביעיות של מנוע DC כולל את הדברים הבאים.
- כמנוע בכיוון קדימה או בכיוון השעון.
- כמחולל בכיוון קדימה.
- כמנוע בכיוון לאחור או נגד כיוון השעון.
- כמחולל בכיוון ההפוך.

4 פעולת הרבע של מנוע DC
- ברבע הראשון המנוע מניע את העומס עם המהירות והמומנט גם בכיוון חיובי.
- ברבע השני כיוון המומנט מתהפך והמנוע משמש כמחולל
- ברבע השלישי המנוע מניע את העומס במהירות ובמומנט בכיוון שלילי.
- ב -4הרבע, המנוע משמש כגנרטור במצב לאחור.
- ברבע הראשון והשלישי המנוע פועל לכיוונים קדימה ואחור. למשל, מנועים במנופים כדי להרים את העומס וגם להניח אותו.
ברבע השני והרביעי המנוע משמש כמחולל בכיוונים קדימה ואחור, בהתאמה, ומספק אנרגיה בחזרה למקור הכוח. לפיכך הדרך לשלוט על פעולת מנוע, לגרום לה לפעול בכל אחד מארבעת הרביעים היא על ידי שליטה במהירות ובכיוון הסיבוב שלה.
המהירות נשלטת על ידי שינוי מתח האבזור או החלשת השדה. כיוון המומנט או כיוון הסיבוב נשלטים על ידי שינוי המידה בה המתח המיושם גדול או פחות מה EMF האחורי.
תקלות נפוצות במנועי DC
חשוב לדעת ולהבין את הכשלים והתקלות של המנוע כדי לתאר את התקני הבטיחות המתאימים ביותר לכל מקרה. ישנם שלושה סוגים של כשלים במנוע כמו מכני, חשמלי ומכני שצומח לחשמל. התקלות הנפוצות ביותר כוללות את הדברים הבאים,
- פירוק בידוד
- התחממות יתר
- עומסי יתר
- כישלון נשיאה
- רֶטֶט
- רוטור נעול
- יישור מוט מוט
- ריצה הפוכה
- חוסר איזון בשלב
התקלות הנפוצות ביותר המתרחשות במנועי זרם חילופין, כמו גם במנועי DC, כוללות את הדברים הבאים.
- כאשר המנוע אינו מותקן כהלכה
- כאשר המנוע חסום דרך לכלוך
- כאשר המנוע מכיל מים
- כשהמנוע מתחמם יתר על המידה
מנוע DC 12 וולט
מנוע DC 12V הוא זול, קטן כמו גם חזק אשר משמש בכמה יישומים. בחירת מנוע DC מתאים ליישום מסוים היא משימה מאתגרת, ולכן חיוני מאוד לעבוד דרך החברה המדויקת. הדוגמה הטובה ביותר למנועים אלה היא METMotors, מכיוון שהם מייצרים מנועי PMDC (מגנט קבוע DC) באיכות גבוהה במשך למעלה מ 45 שנה.
כיצד לבחור את המנוע הנכון?
הבחירה במנוע 12 וולט DC יכולה להיעשות בקלות באמצעות METmotors מכיוון שאנשי המקצוע של חברה זו ילמדו תחילה את היישום הנכון שלך ולאחר מכן הם שוקלים מאפיינים רבים כמו גם מפרטים כדי להבטיח לך לסיים את המוצר הטוב ביותר האפשרי.
מתח ההפעלה הוא אחד המאפיינים של מנוע זה.
ברגע שמנוע מונע באמצעות סוללות, בדרך כלל נבחרים מתחי הפעלה נמוכים מכיוון שפחות תאים נחוצים כדי לקבל את המתח המסוים. אבל, במתח גבוה, כונן מנוע DC הוא בדרך כלל יעיל יותר. אף על פי שניתן לבצע את פעולתו עם 1.5 וולט שעולה ל 100 וולט. המנועים הנפוצים ביותר הם 6V, 12V ו- 24V. מפרטים עיקריים אחרים של מנוע זה הם מהירות, זרם הפעלה, כוח ומומנט.
מנועי ה- DC 12V מושלמים ליישומים שונים באמצעות אספקת DC המחייבת מומנט פועל כמו גם התנעה גבוהה. מנועים אלה פועלים במהירות נמוכה יותר בהשוואה למתחי מנוע אחרים.
התכונות של מנוע זה משתנות בעיקר על פי חברת הייצור וכן היישום.
- מהירות המנוע היא 350 סל'ד עד 5000 סל'ד
- מומנט מדורג של מנוע זה נע בין 1.1 ל -12.0 ס'מ
- הספק המוצא של מנוע זה נע בין 01 כ'ס ל -21 כ'ס
- גדלי המסגרת הם 60 מ'מ, 80 מ'מ, 108 מ'מ
- מברשות להחלפה
- החיים האופייניים של מברשת הם 2000+ שעות
חזרה EMF במנוע DC
ברגע שמוליך את המוליך הנוכחי בשדה מגנטי, אז המומנט יגרום למוליך והמומנט יסובב את המוליך אשר פורס את שטף השדה המגנטי. בהתבסס על תופעת האינדוקציה האלקטרומגנטית ברגע שהמוליך חותך את השדה המגנטי ואז EMF יגרום בתוך המוליך.
ניתן לקבוע את כיוון ה- EMF המושרה באמצעות שלטונו הימני של פלמינג. על פי כלל זה, אם אנו אוחזים בזווית של 90 מעלות בתמונה הממוזערת, המורה והאצבע המרכזית שלנו, לאחר מכן האצבע המורה תסמן את דרך השדה המגנטי. כאן, אצבע האגודל מייצגת את דרך התנועה של המוליך והאצבע האמצעית מציינת את ה- EMF המושרה מעל המוליך.
על ידי יישום הכלל הימני של פלמינג, אנו יכולים להבחין כי כיוון ה- EMF המושרה הפוך למתח המופעל. אז EMF נקרא EMF האחורי או EMF נגד. פיתוח EMF אחורי יכול להיעשות בסדרה באמצעות המתח המופעל, אולם בכיוון ההפוך, כלומר EMF האחורי מתנגד לזרימת הזרם הגורמת לו.
ניתן לתת את גודל EMF האחורי באמצעות ביטוי דומה להלן.
Eb = NP ϕZ / 60A
איפה
'Eb' הוא ה- EMF המושרה של המנוע הנקרא Back EMF
'A' הוא לא. של נתיבים מקבילים לאורך האבזור בין מברשות הקוטביות ההפוכה
'P' הוא לא. של מוטות
'N' זו המהירות
'Z' הוא כל מספר המוליכים בתוך האבזור
'Φ' הוא שטף מועיל לכל מוט.
במעגל שלעיל, גודל emf האחורי תמיד נמוך בהשוואה למתח המופעל. הפער בין השניים כמעט שווה ערך ברגע שמנוע ה- DC פועל בתנאים הרגילים. הזרם יגרום למנוע הדו-סקטור עקב האספקה הראשית. הקשר בין האספקה העיקרית, EMF האחורי וזרם האבזור יכול לבוא לידי ביטוי כ- Eb = V - IaRa.
יישום לבקרת פעולת מנוע DC ב -4 רביעיות
ניתן להשיג שליטה על פעולת מנוע DC בארבעה רביעים באמצעות מיקרו-בקר המשולב עם 7 מתגים.

4 בקרת רבעונים
תיק 1: כאשר לוחצים על מתג ההפעלה והשעון, ההיגיון במיקרו-בקר מעניק פלט של לוגיקה נמוך לסיכה 7 והגיון לסיכה 2, מה שהופך את המנוע לסובב בכיוון השעון ופועל בכיוון 1רחוברָבִיעַ. ניתן לשנות את מהירות המנוע על ידי לחיצה על מתג ה- PWM, מה שגורם ליישום של פולסים של משך זמן שונה לסיכת ההפעלה של כונן הנהג, ובכך לשנות את המתח המופעל.
מקרה 2: כאשר לוחצים על הבלם הקדמי, ההיגיון של המיקרו-בקר מפעיל לוגיקה נמוכה על pin7 והגיון גבוה על סיכה 2 והמנוע נוטה לפעול בכיוון ההפוך שלו, מה שגורם לו לעצור באופן מיידי.
באופן דומה, לחיצה על המתג נגד כיוון השעון גורמת למנוע לנוע בכיוון ההפוך, כלומר לפעול ב -3מחקר ופיתוחרבע, ולחיצה על מתג הבלם לאחור גורמת למנוע לעצור באופן מיידי.
כך באמצעות תכנות נכון של המיקרו-בקר ודרך מתגים, ניתן לשלוט על פעולת המנוע לכל כיוון.
לפיכך, זה הכל על סקירה כללית של מנוע DC. ה היתרונות של מנוע DC האם הם מספקים בקרת מהירות מצוינת להאצה ולהאטה, עיצוב קל להבנה ועיצוב כונן פשוט וזול. הנה שאלה עבורך, מהם החסרונות של מנוע DC?
נקודות זיכוי:
- מנועי DC ללא מברשות עובדים על ידי news.softpedia
- 4 הפעלת הרבע של מנוע DC על ידי lh5.ggpht
- מנוע DC ממונע על ידי ויקימדיה
- שאנט מוטור על ידי אֵזוֹר





{kind=link}
{kind=link}
{kind=link}
{kind=link}