
הַגדָרָה
מנוע DC ללא מברשות מורכב מרוטור בצורת מגנט קבוע וסטטור בצורה של פיתולי אבזור פוליפאזי. הוא שונה ממנוע הדו-שיח הקונבנציונאלי בכך שהוא אינו מכיל מברשות וההסעה נעשית באמצעות חשמל, באמצעות כונן אלקטרוני להזנת פיתולי הסטטור.
בעיקרון ניתן לבנות מנוע BLDC בשתי דרכים - על ידי הצבת הרוטור מחוץ לליבה ואת הפיתולים בליבה ואחר על ידי הצבת הפיתולים מחוץ לליבה. בהסדר הקודם, מגנטים הרוטור משמשים כמבודד ומפחיתים את קצב פיזור החום מהמנוע ופועלים בזרם נמוך. זה משמש בדרך כלל אצל אוהדים. בהסדר האחרון המנוע מפזר יותר חום ובכך גורם לעלייה במומנט שלו. הוא משמש בכונני דיסק קשיח.

BLDC
הפעלה מוטורית של שלב 2 של מוט 2
מנוע ה DC ללא מברשות מונע על ידי כונן אלקטרוני המעביר את מתח האספקה בין פיתולי הסטטור כאשר הרוטור מסתובב. מיקום הרוטור מנוטר על ידי המתמר (אופטי או מגנטי) המספק מידע לבקר האלקטרוני ובהתאם למצב זה נקבע סליל הסטטור שיופעל. כונן אלקטרוני זה מורכב מטרנזיסטורים (2 לכל שלב) המופעלים באמצעות מעבד.

BLDC-DC
השדה המגנטי שנוצר על ידי המגנטים הקבועים מתקשר עם השדה המושרה על ידי הזרם בפיתולי הסטטור ויוצר מומנט מכני. מעגל המיתוג האלקטרוני או הכונן ממתגים את זרם האספקה לסטטור כדי לשמור על זווית קבועה של 0 עד 90 מעלות בין השדות האינטראקטיביים. חיישני הול מותקנים בעיקר על הסטטור או על הרוטור. כאשר הרוטור עובר דרך חיישן האולם, על בסיס הקוטב הצפוני או הדרומי, הוא מייצר אות גבוה או נמוך. בהתבסס על השילוב של האותות הללו, מוגדר המסלול שיופעל אנרגיה. על מנת לשמור על פעולת המנוע, השדה המגנטי המיוצר על ידי הפיתולים צריך לעבור מיקום, כאשר הרוטור נע כדי להתעדכן עם שדה הסטטור.

מעגל חשמלי
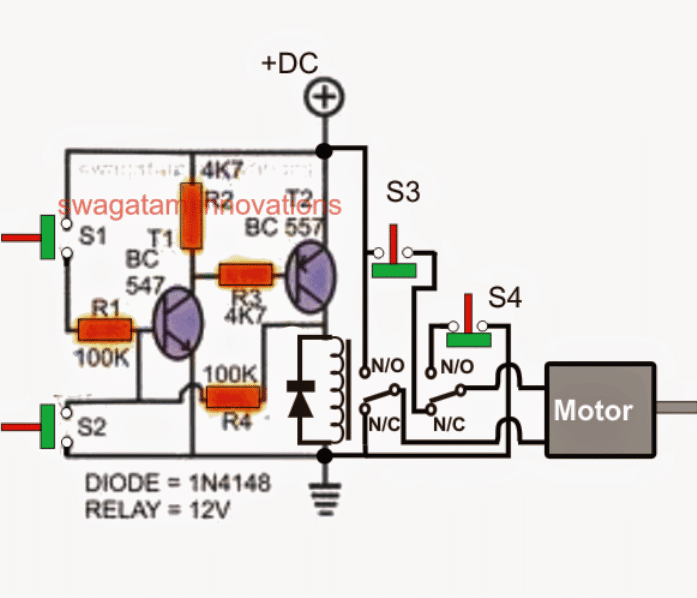
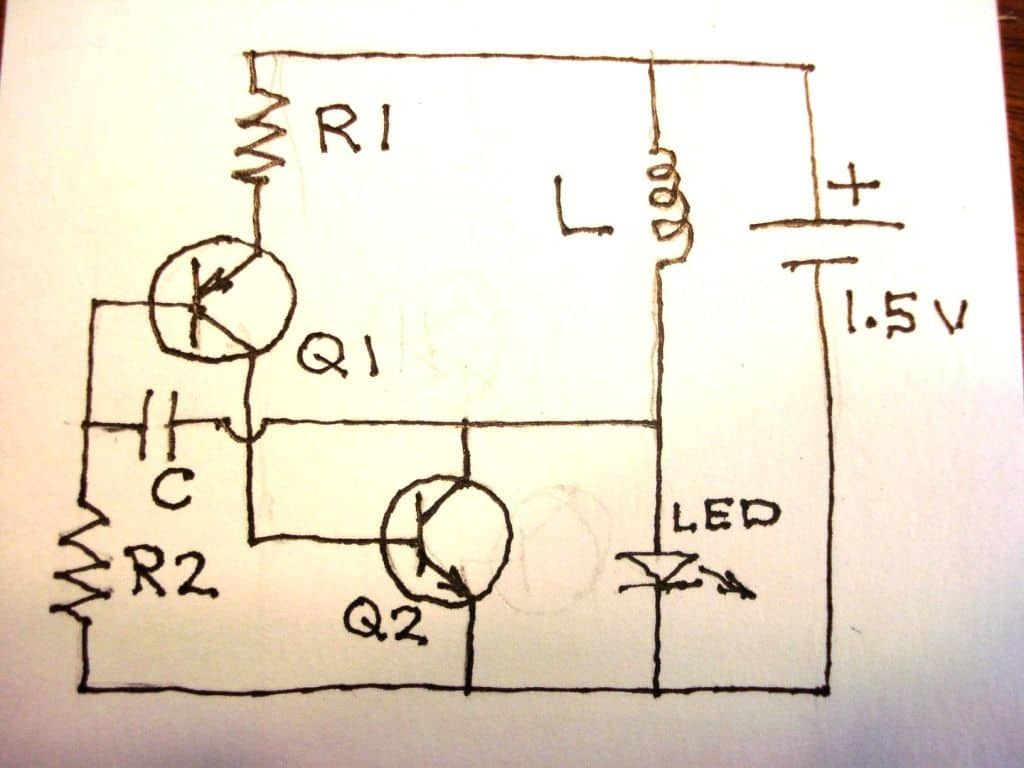
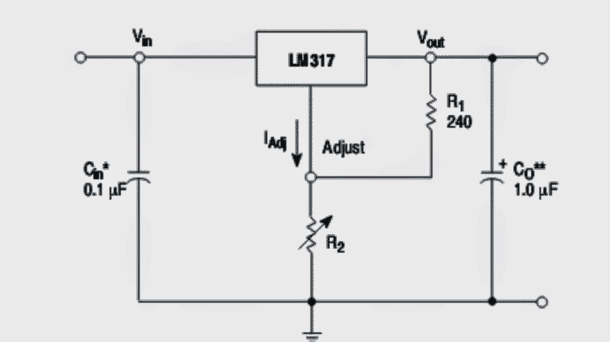
במנוע זרם זרם ללא מברשת בעל 4 מוטים, דו פאזי, נעשה שימוש בחיישן אולם יחיד, המוטבע על הסטטור. כאשר הרוטור מסתובב, חיישן האולם מרגיש את המיקום ומפתח אות גבוה או נמוך, תלוי בקוטב המגנט (צפון או דרום). חיישן האולם מחובר באמצעות נגד לטרנזיסטורים. כאשר מתרחש אות מתח גבוה בפלט החיישן, הטרנזיסטור המחובר לסליל A מתחיל להתנהל, ומספק את הנתיב לזרימת הזרם ובכך מניע את הסליל A. הקבל מתחיל להיטען למתח האספקה המלא. כאשר חיישן האולם מזהה שינוי בקוטביות של הרוטור, הוא מפתח אות מתח נמוך ביציאתו ומכיוון שהטרנזיסטור 1 אינו מקבל שום אספקה, הוא נמצא במצב מנותק. המתח שפותח סביב הקבל הוא Vcc, שהוא מתח האספקה ל -2נדהטרנזיסטור, וסליל B מופעל כעת, כאשר הזרם עובר דרכו.
מנועי BLDC כוללים מגנטים קבועים קבועים, המסתובבים ואבזור קבוע, מה שמבטל את בעיות החיבור של הזרם לאבזור הנע. ואולי יותר מוטות ברוטור מאשר מנועי הסטטור או הרתיעה. האחרון עשוי להיות ללא מגנטים קבועים, רק מוטות המושרים על הרוטור ואז נמשכים לסידור על ידי פיתולי סטטור מתוזמנים. בקר אלקטרוני מחליף את מכלול המברשת / הקומוטאטור של מנוע ה- DC המוברש, אשר מעביר ללא הרף את השלב לפיתולים כדי לשמור על המנוע. הבקר מבצע חלוקת כוח מתוזמנת השוואתית באמצעות מעגל מצב מוצק במקום מערכת המברשת / הקומוטטור.

מנוע BLDC
7 יתרונות מנועי DC ללא מברשות
- מהירות טובה יותר לעומת מאפייני מומנט
- תגובה דינמית גבוהה
- יעילות גבוהה
- אורך חיים ארוך בגלל מחסור בהפסדי חשמל וחיכוך
- פעולה ללא רעש
- טווחי מהירות גבוהים יותר
יישומים:
עלות המנוע DC ללא מברשות ירדה מאז הצגתו בגלל התקדמות החומרים והעיצוב. ירידה זו בעלות, יחד עם נקודות המוקד הרבות שיש לה על מנוע DC המברשת, הופכת את המנוע DC ללא מברשות למרכיב פופולרי ביישומים ייחודיים רבים. יישומים המשתמשים במנוע BLDC כוללים, אך אינם מוגבלים ל:
- מוצרי אלקטרוניקה
- תַחְבּוּרָה
- חימום ואוורור
- הנדסת תעשייה
- הנדסת מודלים
עקרון העבודה
העקרונות לעבודה של מנועי BLDC זהים למנוע מוברש DC מוברש, כלומר למשוב על מיקום הפיר הפנימי. במקרה של מנוע DC מוברש, המשוב מיושם באמצעות קומוטטור מכני ומברשות. בתוך מנוע BLDC, הוא מושג באמצעות חיישני משוב מרובים. במנועי BLDC אנו משתמשים בעיקר בחיישן אפקט הול, בכל פעם שקטבים מגנטיים של הרוטור עוברים ליד חיישן האולם, הם מייצרים אות ברמה גבוהה או נמוכה, שניתן להשתמש בהם לקביעת מיקום הפיר. אם כיוון השדה המגנטי מתהפך, גם המתח שפותח יתהפך.
שליטה במנוע BLDC
יחידת הבקרה מיושמת על ידי מיקרו-אלקטרוניקה עם מספר אפשרויות היי-טק. זה עשוי להיות מיושם באמצעות מיקרו-בקר, מיקרו-בקר ייעודי, יחידת מיקרו-אלקטרונית חוטית, PLC או יחידה אחרת דומה.
הבקר האנלוגי עדיין משתמש, אך הוא אינו יכול לעבד הודעות משוב ולשלוט בהתאם. בעזרת מעגלי בקרה מסוג זה ניתן ליישם אלגוריתמי בקרה בעלי ביצועים גבוהים, כגון בקרת וקטור, שליטה מכוונת-שדה, בקרה במהירות גבוהה שכולם קשורים למצב האלקטרומגנטי של המנוע. יתר על כן בקרת לולאה חיצונית לדרישות דינמיקה שונות כגון בקרות מנוע הזזה, שליטה אדפטיבית, שליטה ניבוי ... וכו 'מיושמות גם באופן קונבנציונאלי.
מלבד כל אלה, אנו מוצאים PIC (מעגל משולב כוח) בעל ביצועים גבוהים, ASIC (מעגלים משולבים ספציפיים ליישומים) ... וכו '. שיכולים לפשט מאוד את בניית הבקרה ואת היחידה האלקטרונית החשמלית גם יחד. לדוגמא, כיום יש לנו רגולטור PWM (Pulse Width Modulation) מלא ב- IC יחיד שיכול להחליף את כל יחידת הבקרה במערכות מסוימות. IC נהג מורכב יכול לספק את הפיתרון המלא של הנעת כל ששת מתגי ההפעלה בממיר תלת פאזי. ישנם מספר רב של מעגלים משולבים דומים עם עוד ועוד הוספות מיום ליום. בסופו של יום, הרכבת המערכת עשויה לכלול רק פיסת תוכנת בקרה עם כל החומרה שתגיע לצורה ולצורה הנכונה.
ניתן להשתמש בגל PWM (Pulse Width Modulation) לבקרת מהירות המנוע. כאן ניתן המתח הממוצע או שהזרם הממוצע שזורם דרך המנוע ישתנה בהתאם לזמן הפעלה וכיבוי של הפולסים השולטים במהירות המנוע כלומר מחזור החובה של הגל שולט במהירותו. בשינוי מחזור החובה (זמן הפעלה), אנו יכולים לשנות את המהירות. על ידי החלפת יציאות פלט, זה ישנה למעשה את כיוון המנוע.
בקרת מהירות
בקרת מהירות של מנוע ה- BLDC חיונית להכנת המנוע בקצב הרצוי. ניתן לשלוט על מהירותו של מנוע DC ללא מברשת על ידי שליטה על מתח הכניסה DC. ככל שהמתח גבוה יותר, כך המהירות גבוהה יותר. כאשר המנוע עובד במצב רגיל או פועל מתחת למהירות מדורגת, מתח הכניסה של האבזור משתנה באמצעות דגם ה- PWM. כאשר מנוע מופעל מעל למהירות מדורגת, השטף מוחלש באמצעות קידום הזרם היוצא.
בקרת המהירות יכולה להיות לולאה סגורה או בקרת מהירות בלולאה פתוחה.
בקרת מהירות לולאה פתוחה - זה כולל פשוט בקרה על מתח הספק המופעל על מסופי המנוע על ידי קיצוץ מתח הספק. עם זאת, התוצאה היא צורה כלשהי של הגבלה נוכחית.
בקרת מהירות לולאה סגורה - זה כולל שליטה על מתח אספקת הקלט באמצעות משוב המהירות מהמנוע. כך נשלט מתח האספקה בהתאם לאות השגיאה.
בקרת המהירות במעגל סגור מורכבת משלושה מרכיבים בסיסיים.
- מעגל PWM ליצירת פולסי PWM הנדרשים. זה יכול להיות מיקרו-בקר או טיימר IC.
- מכשיר חישה לחוש את המהירות המוטורית בפועל. זה יכול להיות חיישן אפקט הול, חיישן אינפרא אדום או מקודד אופטי.
- כונן מנוע לבקרת פעולת המנוע.
טכניקה זו של שינוי מתח האספקה בהתבסס על אות השגיאה יכולה להיות באמצעות טכניקת בקרת pid או באמצעות לוגיקה מטושטשת.
יישום לבקרת מהירות של מנוע DC ללא מברשות

בקרת מנוע BLDC DC
פעולת המנוע נשלטת באמצעות מצמד אופטי וסידור MOSFET, כאשר כוח DC קלט נשלט באמצעות טכניקת PWM מהמיקרו-בקר. כאשר המנוע מסתובב, הוביל האינפרא אדום שנמצא בפיר שלו מואר באור לבן בגלל נוכחות של נקודה לבנה על הפיר ומחזיר את האור האינפרא אדום. הפוטודיודה מקבלת אור אינפרא אדום זה ועוברת שינוי בהתנגדותו, ובכך גורמת לשינוי במתח האספקה לטרנזיסטור המחובר וניתן דופק למיקרו-בקר כדי לייצר את מספר הסיבובים לדקה. מהירות זו מוצגת על גבי LCD.
המהירות הנדרשת מוזנת בלוח המקשים שמממשק למיקרו-בקר. ההבדל בין המהירות המורגשת למהירות הרצויה הוא אות השגיאה והמיקרו-בקר מייצר את אות ה- PWM לפי אות השגיאה, בהתבסס על ההיגיון המטושטש כדי לתת את כניסת הכוח DC למנוע.
כך באמצעות בקרת לולאה סגורה, ניתן לשלוט על מהירות המנוע הסרגל ללא מברשות וניתן לגרום לו להסתובב בכל מהירות רצויה.
קרדיט צילום:






{kind=link}