מנועי סרוו הם מכשירים מכניים עצמאיים המשמשים לשליטה במכונות בדיוק רב. אלה נמצאים ביישומים רבים החל מצעצועים וכלה באוטומציה תעשייתית. יש סוגים שונים של מנוע, אך מנועי סרוו תוכננו במיוחד למיקום זוויתי ספציפי לשליטה במכונות. בדרך כלל משתמשים במנוע סרוו כדי לשלוט על תנועת הזווית בין 0 ° ל -180 ° ו- 0 ° עד 90 °. ה עקרון עבודה של מנוע סרוו מבוסס על ה- PWM ( אפנון רוחב הדופק ) פולסים.

מנוע סרוו
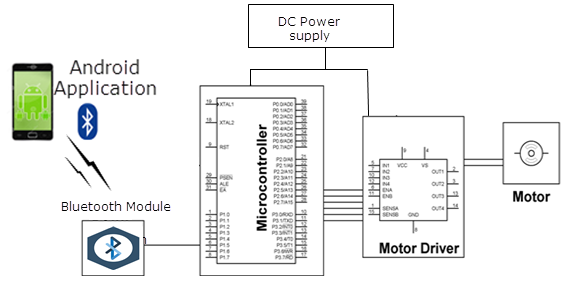
ממשק מנועי סרוו עם מיקרו-בקר 8051
מנוע סרוו הוא אחד המנועים הנפוצים ביותר לתנועה זוויתית מדויקת. היתרון בשימוש במנוע סרוו הוא שניתן לשלוט במיקום הזוויתי של המנוע ללא כל מנגנון משוב. מנועי סרוו משמשים בדרך כלל ב יישומים מסחריים ותעשייתיים . הם נמצאים בשימוש נרחב כמו במערכות כונן כגון רובוטים, מטוסים וכו '.

מנוע סרוו מממשק עם מיקרו-בקר 8051
עיקרון העבודה של מנוע סרוו תחביב והפעלה הם פשוטים מאוד, הוא כלל שלושה חוטים כאשר שניים מהם (שחור ואדום) שימשו לספק כוח והחוט השלישי משמש לספק אות בקרה. גלי רוחב מאופנים (PWM) משמשים כאותות בקרה והמיקום הזוויתי מוגדר על ידי רוחב הדופק בכניסה הבקרה. במאמר זה אנו משתמשים במנוע סרוו בעל זווית סיבוב בין 0-180 ° וניתן לשלוט על מיקום זוויתי על ידי שינוי מחזורי העבודה בין 1ms ל 2ms.
הנה מנוע סרוו ממשק עם מיקרו-בקר 8051 , החוט השחור המחובר לסיכת האדמה והמנוע מקבלים את הכוח מהחוט האדום. השליטה ביציאה מחוברת למנוע סרוו 0 של מיקרו-בקר 8051. מתנד הקריסטל 11.0592MHz משמש לספק את השעון המופעל למיקרו-בקר ולקבלים קרמיים 22pf המשמשים לייצוב פעולת הגביש. קבלים 10KΩ ו- 10uf משמשים לספק את הכוח בעת האיפוס למיקרו-בקר.
שליטה במנוע סרוו עם סיבובי זווית
עקרון העבודה של מנוע סרוו תלוי בעיקר במחזורי עבודה. הוא משתמש בגלי PWM Modulated (PWM) כאותות בקרה. זווית הסיבוב נפתרת על ידי רוחב הדופק של סיכת הבקרה. כאן מנוע הסרוו המשמש לזווית סיבוב בין 0 ל -180 מעלות. אנו יכולים לשלוט במיקום הזוויתי המדויק על ידי שינוי הדופק בין 1ms ל 2ms.

שליטה במנוע סרוו עם סיבובי זווית
תכנות מנועי סרוו עם סיבובים זוויתיים
#לִכלוֹל
Sbit servomotor_pin = P0 ^ 5
עיכוב בטל (int לא חתום)
בטל סרוו_עיכוב (int לא חתום)
חלל ראשי ()
{
Servomotor_pin = 0x00
לַעֲשׂוֹת
{
// פנה ל- 0 °
Servomotor_pin = 0x01
סבו_עיכוב (50)
Servomotor_pin = 0x00
עיכוב (1000)
// פנה ל -90 מעלות
Servomotor_pin = 0x01
סבו_עיכוב (82)
Servomotor_pin = 0x00
עיכוב (1000)
// להפוך ל -180 מעלות
Servomotor_pin = 0x01
סבו_עיכוב (110)
Servomotor_pin = 0x00
עיכוב (1000)
בעוד (1)
}
}
עיכוב בטל (int a חתום)
{
לא חתום עמ '
עבור (p = 0p
}
בטל סרוו_עיכוב (int a חתום)
{
לא חתום עמ '
עבור (p = 0p
}
עקרון עבודה של מנוע סרוו
עקרון העבודה של מנועי סרוו תלוי בעיקר ב'כלל יד שמאל פלמנית '. בעיקרון מנועי סרוו מותאמים עם מנועי DC , חיישן מיקום, הפחתת ציוד ומעגל אלקטרוני. מנועי DC משיגים מופעל באמצעות סוללה ורצים במהירות גבוהה ובמומנט נמוך. הרכבנו פיר וציוד המחוברים למנועי DC ואז נוכל להגדיל ולהקטין את מהירות המנוע בהדרגה.
חיישן המיקום חש את מיקום הפיר ממצבו הקבוע ושולח את המידע למעגל הבקרה. מעגל הבקרה מפענח את האותות בהתאם מחיישן המיקום ומשווה את מיקום המנועים בפועל עם המיקום המועדף ובהתאם לכך שולט בכיוון הסיבוב של מנוע DC כדי לקבל את המיקום הדרוש. בדרך כלל מנוע סרוו דורש אספקת 4.8 וולט עד 6 וולט DC.
מנוע סרוו השולט על ידי פקודות יציאה טורית
הכוונה העיקרית של פרויקט זה היא לשלוט על מנוע סרוו באמצעות מחשב אישי. הוא זקוק לקו בקרה יחיד ממיקרו-בקרת וקו קלט סדרתי, מהיציאה הטורית של המחשב האישי כדי לשלוח פקודות למעגל. מקור התזמון מסופק על ידי מתנד הקריסטל. מעגל מנועי סרוו מעוצב שהתממשק למחשב בעזרת הכבל הסדרתי והמעבר המפלס ואז פתח את תוכנת 'היפר טרמינל' במחשב האישי לבחירת המסך של המחשב.

בקרת מנוע סרוו על ידי פקודות יציאה טורית
לאחר שהפקודות נשלחות מהמחשב האישי (PC) למיקרו-בקר דרך ההיפר-טרמינל עם מעביר מפלס, המיקרו-בקר משיג נתונים אלה ומשווה אותם לנתונים שהוגדרו מראש ויוצר אותות תואמים להפעלת מנהל ההתקן כדי להניע אותם המהירות הרצויה. רב פרויקטים של מיקרו-בקר פותח על בסיס מנוע סרוו כמו איזון רובוטים, מסוקי מסלול וכן הלאה. אנו יכולים להשתמש במנוע סרוו למטרות אבטחה על ידי ממשק למצלמה אלחוטית ככל שאפשר לשלוט במצלמת 360.
רובוט מאזן עצמי
הרובוט המאזן העצמי מסוגל לאזן את עצמו בעזרת מנועי הסרוו. רובוט זה הורכב באמצעות רכיבים מבניים, מכניים ואלקטרוניים המייצרים פלטפורמה בלתי מאוזנת בעליל, והיא נוטה מאוד להטות ביישור אחד. גלגלי הרובוט מסוגלים להסתובב עצמאית בשני אופנים, המונעים על ידי מנוע סרוו. מידע על זווית המכשיר ביחס לקרקע יתקבל מ חיישני הטיה במכשיר.

רובוט מאזן עצמי
חיישן ההטיה עשוי להיות מד תאוצה, חיישן גירוסקופי, או חיישן IR (למרחק מדידה לקרקע). החיישנים שולחים מידע ליחידת הבקרה, שתעבד את המשוב באמצעות אלגוריתם יחסי, אינטגרלי, נגזר (PID) בסיסי ליצירת אותות בקרת מיקום מפצים למנועי הסרוו על מנת לאזן את המכשיר.
יישומי מנוע סרוו
- הוא משמש במכונות הקש לחיתוך החלקים לגודל
- משתמשים בו בתחנת מילוי הסוכר
- הוא משמש ביישומי תיוג
- הוא משמש מערכת אריזה עם פונקציית תזמון אקראית
- הוא משמש בשימוש במטוסים
היתרונות של סרוו מנוע
- אם מנוע מקבל עומס כבד הנהג יגביר את הזרם לסליל המנוע כמאמציו לסובב את המנוע. בעיקר, אין מצב שאינו מהשלב.
- מנועי סרוו מאפשרים פעולה מהירה.
זה הכל על עקרון העבודה של מנוע סרוו ו ממשק עם מיקרו-בקר 8051 יתר על כן, לכל עזרה טכנית בנושא מאמר זה או פרויקטים אלקטרוניים שתוכננו באמצעות מכשירי ממשק כגון RTC, OLED, זיכרון פלאש, LCD מותאם אישית, תצוגות מסך מגע וכו '. אתה יכול לפנות אלינו על ידי מתן הערותיך בסעיף ההערות למטה.