שימוש ב- PWM כטכניקת מיתוג
אפנון רוחב הדופק (PWM) הוא טכניקה נפוצה לשליטה בדרך כלל על כוח DC למכשיר חשמלי, שהופכה להיות מעשית על ידי מתגי הפעלה אלקטרוניים מודרניים. עם זאת, הוא גם מוצא את מקומו במסוקי AC. הערך הממוצע של הזרם המסופק לעומס נשלט על ידי מיקום המתג ומשך מצבו. אם תקופת ההפעלה ארוכה יותר בהשוואה לתקופת ההפעלה, העומס מקבל הספק גבוה יחסית. לכן תדר המיתוג של PWM צריך להיות מהיר יותר.
בדרך כלל יש לבצע החלפה כמה פעמים בדקה בכיריים חשמליות, 120 הרץ במעבה מנורה, מכמה קילו-הרץ (קילו-הרץ) לעשרות קילו-הרץ עבור כונן מנוע. תדר ההחלפה של מגברי שמע וספקי חשמל למחשב הוא כעשרה עד מאות קילוהרץ. היחס בין זמן ה- ON לתקופת הזמן של הדופק נקרא מחזור חובה. אם מחזור החובה נמוך, זה מרמז על הספק נמוך.
אובדן החשמל במכשיר המיתוג נמוך מאוד, בגלל כמות זרם כמעט זניחה שזורמת במצב כבוי של המכשיר וכמות זניחה של מתח מתח במצב OFF. בקרות דיגיטליות משתמשות גם בטכניקת PWM. PWM שימש גם במערכות תקשורת מסוימות בהן נעשה שימוש במחזור החובה שלה להעברת מידע בערוץ תקשורת.

ניתן להשתמש ב- PWM כדי להתאים את כמות ההספק הכוללת המועברת לעומס ללא הפסדים שנגרמים בדרך כלל כאשר העברת כוח מוגבלת באמצעים התנגדותיים. החסרונות הם פעימות המוגדרות על ידי מחזור החובה, תדירות המיתוג ותכונות העומס. בתדר מיתוג גבוה מספיק ובמידת הצורך באמצעות פילטרים אלקטרוניים פסיביים נוספים ניתן להחליק את הרכבת הדופק ולהשיב צורת גל אנלוגית ממוצעת. ניתן ליישם בקלות מערכות בקרת PWM בתדירות גבוהה באמצעות מתגי מוליכים למחצה.
כפי שכבר צוין לעיל כמעט שום כוח לא מתפזר על ידי המתג במצב הפעלה או כיבוי. עם זאת, במהלך המעברים בין מצבי הדלקה וכיבוי הן המתח והזרם אינם אפסיים ולכן כוח ניכר מתפזר במתגים. למרבה המזל, שינוי המצב בין הפעלה מלאה לכיבוי מהיר למדי (בדרך כלל פחות מ 100 ננו-שניות) ביחס לזמני הפעלה או כיבוי אופייניים, ולכן פיזור ההספק הממוצע הוא נמוך למדי בהספק שמועבר גם כאשר תדרי מיתוג גבוהים. משומשים.
שימוש ב- PWM כדי לספק כוח DC לטעינה
רוב התהליך התעשייתי מחייב להיות מופעל על פרמטרים מסוימים שמהירות הכונן נוגעת להם. מערכות הכונן החשמלי המשמשות ביישומים תעשייתיים רבים דורשות ביצועים גבוהים יותר, אמינות, מהירות משתנה בשל קלות השליטה בהן. ה בקרת מהירות של מנוע DC חשוב ביישומים שבהם דיוק והגנה הם מהותיים. מטרתו של בקר מהירות מנוע היא לקחת אות המייצג את המהירות הנדרשת ולהניע מנוע במהירות זו.
אפנון רוחב הדופק (PWM), כפי שהוא חל על בקרת המנוע, הוא דרך להעביר אנרגיה ברצף של פעימות ולא באמצעות אות משתנה ברציפות (אנלוגי). על ידי הגדלת או הקטנת רוחב הדופק, הבקר מווסת את זרימת האנרגיה לפיר המנוע. ההשראות של המנוע עצמו פועלות כמו פילטר, אוגר אנרגיה במהלך מחזור 'ON' תוך שחרורו בקצב המתאים לכניסה או לאות הייחוס. במילים אחרות, אנרגיה זורמת לעומס לא כל כך את תדר המיתוג, אלא בתדר הייחוס.
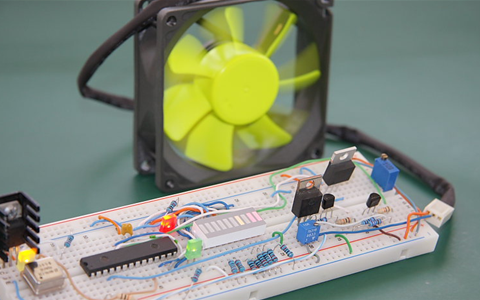
המעגל משמש לבקרת המהירות של מנוע DC באמצעות טכניקת PWM. בקר מנוע DC 12V מהירות משתנה משתמש בטיימר IC 555 כמחולל דופק PWM לוויסות מהירות המנוע DC12 וולט. IC 555 הוא שבב הטיימר הפופולרי המשמש לייצור מעגלי טיימר. הוא הוצג בשנת 1972 על ידי הסיגנטיקס. זה נקרא 555 כי יש שלושה נגדים של 5 K בפנים. ה- IC מורכב משני משווים, שרשרת נגדים, כפכף ושלב פלט. זה עובד בשלושה מצבים בסיסיים - Astable, Monostable (שם הוא פועל מחולל דופק חד פעמי ומצב Bistable. כלומר, כאשר הוא מופעל, הפלט עולה גבוה לתקופה על בסיס ערכי הנגד והתזמון הקבל. מצב Astable (AMV), ה- IC עובד כמולטיברטור פועל בחינם. הפלט הופך גבוה ונמוך ברציפות כדי להעניק תפוקה פועמת כמתנד. במצב Bistable המכונה גם טריגר Schmitt, ה- IC פועל ככפכף עם גבוה או תפוקה נמוכה בכל טריגר ואיפוס.

במעגל זה משתמשים ב- IRF540 MOSFET. זהו MOSFET לשיפור ערוץ N. זהו MOSFET כוח מתקדם שתוכנן, נבדק, ומובטח לעמוד ברמת אנרגיה מוגדרת במצב פעולה של מפולת מפולת. MOSFET כוח זה מיועד ליישומים כגון מווסת מיתוג, ממירי מיתוג, נהגי מנוע, נהגי ממסר, ומניעים לטרנזיסטורי מיתוג דו קוטביים בעלי הספק גבוה הדורשים הספק כונן מהיר במהירות גבוהה. ניתן להפעיל סוגים אלה ישירות ממעגלים משולבים. ניתן לכוונן את מתח העבודה של מעגל זה בהתאם לצרכים של מנוע DC המונע. מעגל זה יכול לעבוד מ 5-18VDC.
מעל המעגל כלומר בקרת מהירות מנוע DC על ידי PWM הטכניקה משתנה במחזור החובה שבתורו שולט במהירות המנוע. IC 555 מחובר במצב ויברטורי ריצה חופשי המופעל במצב מדהים. המעגל מורכב ממערך של פוטנציומטר ושתי דיודות, המשמש לשינוי מחזור החובה ולשמירה על תדירות קבועה. מכיוון שהתנגדות הנגד המשתנה או הפוטנציומטר משתנה, מחזור הפעולה של הפולסים המופעלים על ה- MOSFET משתנה ובהתאם לכך מתח הספק המנוע משתנה וכך מהירותו עולה ככל שמעגל הפעולה עולה.
שימוש ב- PWM כדי לספק כוח זרם לטעינה
מתגי מוליכים למחצה מודרניים כגון MOSFET או טרנזיסטורים דו קוטביים של שער מבודד (IGBT) הם רכיבים אידיאליים למדי. כך ניתן לבנות בקרי יעילות גבוהים. בדרך כלל ממירי תדרים המשמשים לשליטה במנועי זרם הם בעלי יעילות טובה יותר מ- 98%. ספקי כוח מיתוגיים יעילים נמוכים יותר בגלל רמות מתח יציאה נמוכות (לעיתים יש צורך אפילו בפחות מ -2 וולט למיקרו-מעבדים) אך עדיין ניתן להשיג יותר מ- 70-80% יעילות.

סוג זה של שליטה על זרם חילופין הוא שיטת זווית הירי המאוחרת. זה זול יותר ומייצר הרבה רעשי חשמל והרמוניות בהשוואה לבקרת ה- PWM האמיתית המפתחת רעש זניח.
ביישומים רבים, כגון חימום תעשייתי, בקרת תאורה, מנועי אינדוקציה להפעלה רכה ובקרי מהירות למאווררים ומשאבות דורשים מתח AC משתנה ממקור AC קבוע. בקרת זווית הפאזה של הרגולטורים הייתה בשימוש נרחב לדרישות אלה. זה מציע כמה יתרונות כגון פשטות ויכולת שליטה בכמות גדולה של כוח מבחינה כלכלית. עם זאת, זווית ירי מאוחרת גורמת לאי המשכיות ולהרמוניות רבות בזרם העומס וגורם הספק מושהה מתרחש בצד זרם החשמל כאשר זווית הירי גדלה.
ניתן לשפר בעיות אלה באמצעות מסוק PWM AC. מסוק PWM AC זה מציע מספר יתרונות כגון זרם קלט סינוסי עם גורם כוח אחדות כמעט. עם זאת, כדי להקטין את גודל המסנן ולשפר את איכות ויסות הפלט יש להגדיל את תדירות המיתוג. זה גורם לאובדן מיתוג גבוה. בעיה נוספת היא הקומוטציה בין מתג ההעברה S1 למתג הגלגל החופשי S2. זה גורם לזינוק הנוכחי אם שני המתגים מופעלים בו זמנית (קצר חשמלי), ולזינוק המתח אם שני המתגים כבויים (ללא נתיב גלגל חופשי). כדי להימנע מבעיות אלה, נעשה שימוש ב- snubber RC. עם זאת, זה מגביר את אובדן הכוח במעגל והוא קשה, יקר, מגושם ולא יעיל ליישומי הספק גבוה. המסוק AC עם אפס מיתוג מתח זרם (ZCS-ZVS) מוצע. וסת מתח המוצא שלו צריך לשנות את זמן הכיבוי הנשלט על ידי אות ה- PWM. לפיכך, נדרש להשתמש בבקרת תדרים כדי להשיג את המיתוג הרך ומערכות הבקרה הכלליות משתמשות בטכניקות ה- PWM המייצרות זמן הפעלה. לטכניקה זו יתרונות כמו שליטה פשוטה עם אפנון סיגמא-דלתא וממשיכה את זרם הקלט. התכונות של תצורת המעגל המוצעת ותבניות קצוצות של PWM מוצגות להלן.









![בניית מעגל ממיר באק פשוט [המרה מטה]](https://electronics.jf-parede.pt/img/3-phase-power/D0/build-a-simple-buck-converter-circuit-step-down-converter-1.jpg)