בעידן זה של אוטומציה תעשייתית , רובוטים משמשים לטיפול בתהליכים שונים לאיכות ייצור מדויקת וטובה יותר. בחירת מנוע אידיאלי לרובוט מושלם היא תמיד משימה קשה בעת תכנון הרובוט במיוחד לתעשיות. בחירה נכונה של מנועים חשמליים ברובוטים תעשייתיים נדרשים מספר פרמטרים כדי לקחת בחשבון שליטה בזרוע, מיקום, זוויות וליניאריות.

מנועים המשמשים לרובוטיקה תעשייתית
בחירת מנועים היא הרעיון הכי פחות מובן עבור חובבי רובוטיקה שדורשים אסטרטגיה וניתוח רציני. זה כרוך בקביעת מהירות הרובוט, האצה, דרישות מומנט בהתבסס על משקל הרובוט, גודל הגלגל והיישום במקום בו יש ליישם. ישנם סוגים רבים של מנועים זמינים בשוק של ימינו, אך בעיקר מנועי עמודים זעירים, מנועי סרוו , מנועים לינאריים, מנועי צעד מנועים עם הילוך DC משמשים ברובוטים תעשייתיים בהתאם לאזור היישומים שלהם.
בחירה לא נכונה של מנוע בסופו של דבר עם רובוט עם מוגבלות, אז איזה סוג מנוע מתאים והכי מתאים להפוך את הרובוטים התעשייתיים לאמיתיים, מדויקים ומספיקים כדי לענות על כל צרכי התהליך התעשייתי תוך שמירה על כל המפרט הריאליסטי?
כאן אספנו כמה תובנות של מנוע זה מאנשי מקצוע בתעשייה לבחירת המנוע המתאים שייבחר ליישומים תעשייתיים.
אנו ממליצים לך לעקוב אחר חוות דעתם של מומחים שמטרתם לספק מנועים מיטביים לרובוטיקה תעשייתית עם מנועי DC, צעד, מברשת ו סרוו זמינים לתנועות מדויקות, חסכוניות ואמינות של הרובוט.
צ'. שמפת קומאר
M.tech בעיצוב VLSI
כותב תוכן טכני
 מנועי DC זמינים בטווחים רחבים להפעלה רציפה, אך זה מצריך הפחתת הילוכים לחליפות ליישום המתאים. מנוע צעד אינו מצריך הפחתת הילוכים מכיוון שהפעולה המדורגת שלו מספקת מהירות נמוכה ליישומים שצוינו. סוף סוף מנועי סרוו משמשים לבקרה מדויקת ומדויקת אשר מיושמת בפעולות לולאה סגורה. אבל זה דורש משוב נוסף ומעגלי נהיגה ולכן הוא יקר מ- DC ומנוע צעד. כך שמנועי הסרוו הופכים את הרובוט לאמין יותר בשל תנועתו המדויקת.
מנועי DC זמינים בטווחים רחבים להפעלה רציפה, אך זה מצריך הפחתת הילוכים לחליפות ליישום המתאים. מנוע צעד אינו מצריך הפחתת הילוכים מכיוון שהפעולה המדורגת שלו מספקת מהירות נמוכה ליישומים שצוינו. סוף סוף מנועי סרוו משמשים לבקרה מדויקת ומדויקת אשר מיושמת בפעולות לולאה סגורה. אבל זה דורש משוב נוסף ומעגלי נהיגה ולכן הוא יקר מ- DC ומנוע צעד. כך שמנועי הסרוו הופכים את הרובוט לאמין יותר בשל תנועתו המדויקת.
ויסוואנאת פראת'אפ
M.Tech בהנדסת חשמל
כותב תוכן טכני

בחר במקום רובוטים נמצאים בדרך כלל בתעשיות כדי לבחור אובייקט ממצב אחד או ממקום אחד ולהציב אותו במיקום או במקום אחר. לשם כך יש לשלוט על תנועות זוויתיות של מפרקי הרובוטים, שניתן להשיג באמצעות מנועי סרוו. מנועי סרוו אלה נשלטים באמצעות נתוני PWM הניתנים על ידי הבקר הרובוטי להפעלת מפרקי הרובוטים. מנועי סרוו מסוגלים לייצר מומנט מספיק בכדי להעביר אובייקט במהירות ממצב עצירה. לפיכך, אלה משמשים כגלגלים ברכבים רובוטיים צבאיים ותעשייתיים. מנועי צעד עשויים לשמש גם לשליטה במצב אך אלה יצרכו כוח גם בתקופת המנוחה רק לנעילה והחזקה של המיקום המצווה. לכן, מנועי סרוו משמשים בדרך כלל ברובוטיקה תעשייתית כתחליף לביצועים גבוהים למנועי הצעד.
ס 'נרש רדי
M.tech במערכת משובצת
מדריך פרויקטים
יש לשלוט במבנהו של הרובוט המכני בצורה מושלמת  משימת rm. ישנם שלושה שלבים שונים לשליטה ברובוט כגון תפיסה, עיבוד ופעולה. חיישנים מעבירים לרובוט את המידע אודות מיקום המפרקים שלו ואת אפקט הקצה שלו, ואז מידע זה מעובד ליחידת הבקרה ומחשב את האות המתאים למנוע שנע מכנית. הרוב העצום של הרובוטים משתמש במנועים חשמליים. מנועי DC ללא מברשת ומוברשים חוזרים משתמשים ברובוטים ניידים ובמנועי AC משתמשים ברובוטים תעשייתיים. מנועים אלה מועדפים במערכות עם עומסים קלים יותר, ושם צורת התנועה השולטת היא סיבובית.
משימת rm. ישנם שלושה שלבים שונים לשליטה ברובוט כגון תפיסה, עיבוד ופעולה. חיישנים מעבירים לרובוט את המידע אודות מיקום המפרקים שלו ואת אפקט הקצה שלו, ואז מידע זה מעובד ליחידת הבקרה ומחשב את האות המתאים למנוע שנע מכנית. הרוב העצום של הרובוטים משתמש במנועים חשמליים. מנועי DC ללא מברשת ומוברשים חוזרים משתמשים ברובוטים ניידים ובמנועי AC משתמשים ברובוטים תעשייתיים. מנועים אלה מועדפים במערכות עם עומסים קלים יותר, ושם צורת התנועה השולטת היא סיבובית.
מג'ג'י סורש
מ 'טק במערכות תקשורת אלחוטיות
כותב תוכן טכני

אם אתה רוצה להיות מעורב ב'רובוטיקה 'וביישומם ל'תעשייה', צריך לדעת על 'מנועים' ששימשו ברובוטיקה מכיוון שרובוטיקה תלויה בעיקר במנועים. בעיקרון 'מכונות רובוטיות' משמשות ליישומים שונים בייצור. 'מנועים' שונים כמו DC, פעמו, צעד, כונן אופטי, מנועי סיבוב חלקי ואפקט אולם וכו '... משמשים בכמה טכניקות כדי ליישם אותם בתעשייה ולהפוך אותם לידידותיים, כמו
- מנועי DC משמשים ליישומים מכוונים לסוללה, לאט יותר, ליישומי ניידות.
- בכל מקום בו אנו זקוקים ליישום מונחה סיבוב, אנו יכולים להשתמש במנועי צעד כמו מנועים חד קוטביים ודו קוטביים.
- לתנועות ראש וזרוע, אנו יכולים להשתמש במנועי סיבוב חלקיים.
- אם אנו רוצים להשתמש בשדות מגנטיים, אנו יכולים להשתמש במנועי הול אפקט וכונן אופטי וכו '.
באמצעות רובוטיקה המשתמשת במנועים חכמים נוכל לחסוך כסף, זמן, מקום, תנועות מסוכנות וכו '.
אג'יי סהארה
מנהל שיווק

משתמשים ברובוטים תעשייתיים בסביבת ייצור תעשייתית. אלה הזרועות שפותחו במיוחד עבור יישומים כמו ריתוך, טיפול בחומרים, צביעה ואחרים.
לא כל מכשיר מכטרוני המשמש בסביבה תעשייתית יכול להיחשב כרובוט. כפי שהוגדר על ידי ISO (ארגון התקנים הבינלאומי), מניפולטור רב תכליתי נשלט, מתכנת מחדש, הניתן לתכנות בשלושה צירים או יותר נחשב לרובוט תעשייתי.
מנועים המשמשים לרובוטיקה תעשייתית הם
- מנועי זרם חילופין (AC)
- מנועי זרם ישר (DC)
- סרוו מוטורס
- Stepper Motors.
1. ניתן לחלק מנועי זרם נוסף לסוגים אסינכרוניים וסינכרוניים. לדוגמא, מנוע זרם זרם אינדוקציה הוא יחידה מסוג אסינכרוני המורכבת למעשה מסטטור הפצוע מחוט ורוטור. כוח מחובר לחוט וזרם זרם חילופין שזורם דרכו גורם לשדה אלקטרומגנטי (EM) בחוט המפותל, כאשר שדה מספיק חזק מספק כוח לתנועת הרוטור. מנועים סינכרוניים הם מנועים במהירות קבועה הפועלים בסנכרון עם תדר קו AC והם משמשים בדרך כלל במקום בו נדרשת מהירות קבועה מדויקת.
2. יישומים תעשייתיים רבים, כולל רובוטיקה, משתמשים במנועי DC לעיתים קרובות בגלל קלות השליטה במהירות ובכיוון. הם מסוגלים לטווח מהירויות אינסופי, ממהירות מלאה לאפס, עם מגוון רחב של עומסים.
מכיוון שמנועי DC כוללים יחס גבוה של מומנט לאינרציה, הם יכולים להגיב במהירות לשינויים באותות הבקרה. מנוע DC יכול להיות נשלט בצורה חלקה לתנועה אפסית ומואץ באופן מיידי בכיוון ההפוך ללא צורך במעגלים מורכבים למיתוג כוח. מנועי DC ללא מברשת ללא מגנט הם בדרך כלל יקרים יותר מסוגי מברשות, אם כי הם יכולים לספק יתרונות בצריכת החשמל ובאמינות.
ללא קומוטור, מנועים ללא מברשות יכולים לפעול בצורה יעילה יותר ובמהירויות גבוהות יותר מאשר מנועי DC קונבנציונליים. רוב מנועי DC ללא מברשת פועלים על צורת גל AC טרפז, אך חלק מהמנועים פועלים עם גלי סינוס. מנועים ללא מברשת מונחים על ידי גל סינוס יכולים להשיג פעולה חלקה במהירויות נמוכות יותר עם אדווה מומנט נמוכה, מה שהופך אותם לאידיאליים לטחינה, ציפוי ויישומים אחרים כגון גימור פני השטח.
במקרה של מנועי DC מוברשים, אם אתה רוצה שהמנוע שלך יסתובב לאט יותר בלי לאבד כוח, אתה יכול להשתמש באפנון רוחב הדופק (PWM). זה בעצם אומר להפעיל ולכבות את המנוע מהר מאוד. בדרך זו, המנוע מסתובב במהירות נמוכה יותר כאילו יופעל מתח נמוך יותר ללא טיפול בכוח.
בעיקרון, המומנט שנוצר על ידי מנוע DC מוברש הוא קטן מדי והמהירות גדולה מכדי להיות שימושית. לכן, הפחתות הילוכים משמשות בדרך כלל להפחתת מהירות ולהגדלת מומנט.
3. מנועי סרוו משמשים במערכות לולאה סגורה עם בקר דיגיטלי. הבקר שולח פקודות מהירות למגבר דרייבר, שמזין בתורו את מנוע הסרוו. צורה כלשהי של מכשיר משוב, כגון פותר או מקודד, מספק מידע על מיקום ומהירות המנוע. הרזולר או המקודד עשויים להיות משולבים במנוע או להיות ממוקמים מרחוק. בגלל מערכת הלולאה הסגורה, מנוע סרוו יכול לפעול עם פרופיל תנועה ספציפי שתוכנת בבקר.
4. מנועי צעד יכולים לפעול עם או בלי משוב, כאשר סיבוב המנוע מתפרק לשלבים זוויתיים קטנים. היא נשלטת על ידי אותות פיקוד פועמים, ויכולה לעצור בדיוק בנקודת פיקוד ללא צורך בבלמים או מכלולי מצמד. כאשר מסירים כוח, מנוע צעד קבוע ממגנט קבוע נשאר בדרך כלל במצבו האחרון. ניתן לשמור על מנועי צעד מרובים בסנכרון על ידי הנעתם ממקור משותף.
Dev desai
מנהל שיווק 
אם אתם מתכננים לעסוק ברובוטיקה, תצטרכו להכיר את סוגי המנועים הרבים הקיימים, כל תנועת הרובוטיקה ממונעת בצורה כזו או אחרת, לכן חשוב לדעת מהי האפשרות שלכם.
מנועי DC
מלבד היותו מופעל על ידי סוללה, כיוון התנועה של מנוע DC נקבע על ידי הקוטביות של קלט הכוח. זהו הכרח מוחלט לתפקודים רובוטיים. למרבה המזל, סוג זה של מנוע מגיע במגוון רחב של גדלים, דרישות מתח וזמין בכל מקום.
הסוגים השונים של מנועים הם להלן
- מנוע בסיס ניידות
- מנוע תחביב במהירות גבוהה
- מנוע כונן חגורה
- מנוע מכונית חריץ
- דופק פעל
- מנוע מותאם לזרוע
- צעד דו קוטבי עם מצביע
ביו מוטור
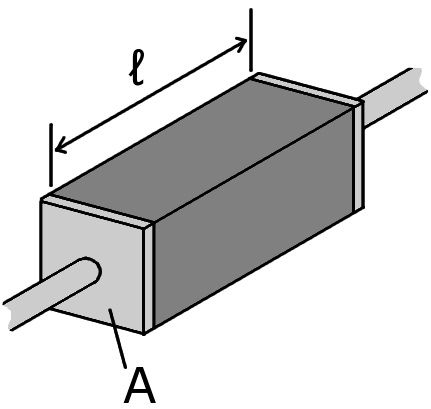
ביו-מתכת הוא חומר מדהים שקיים כבר כמה שנים ויש לו מספר יישומים בתחום הרובוטיקה. אנו יכולים לראות באיור, כי פיסת חוט ביו-מתכת תתכווץ בחמישה אחוז מאורכו כאשר רק כמה וולטים מוחלים עליה. לאחר שנים של בדיקות, ביו-חוט הוכיח את עצמו כחזק, אמין, והופך להיות שימושי יותר עם הופעת מוצרים חדשים. זמן התגובה האיטי במקצת שלו הופך אותו לאידיאלי עבור יישומי זרועות וידיים רובוטיות, שם המטלטלות יהיו בעייתיות. פיסת חוט ארוכה יכולה לייצר תנועה משמעותית כאשר היא נמתחת לכל אורכו של זרוע רובוטית. כיום קיימות ערכות זרועות רובוטיות בשוק המסחרי המשתמשות במתכת הביו.
ממסרים
הממסר, ברובוטיקה, משמש כמעט תמיד לבידוד הכוח המיועד למנועים, מאספקת החשמל לתפקוד המחשב. מנועים, בגלל העכבה הנמוכה שלהם, דורשים דרישות זרם כבדות על ספקי כוח ויוצרים תקלות מרובות שהמחשבים אינם יכולים לסבול. לכן מומלץ להשתמש במקור זרם גבוה נפרד עבור מנועים בלבד.
סולנואידים
סולנואידים משמשים בצורה הטובה ביותר כמכשירים לבקרת מניפולטור או כמפעילי מתגים. התנועה שלהם מהירה וחזקה, כך שכמעט תמיד משתמשים בקפיץ בתפיסות לריכוך הפעולה. כפי שניתן לראות באיור, משתמשים בחוטי בקרה לסגירת האחיזה. חוטי בקרה אלה יכולים לשמש גם כקפיצי החזרה. גראספרים כמו זה נמצאים יותר בעבודת פס ייצור כאשר המשימה נמדדת מאוד ומכסה פרמטרים צרים.
פונקציות משניות
רוב הפונקציות המוטוריות כוללות ניידות, זרוע, ראש או תנועה חיצונית אחרת הנראית לעין, אולם חלק מהתנועות המוטוריות אינן נראות כל כך. רובוטים תעשייתיים גדולים משתמשים במערכות הידראוליות המשתמשות במנועי משאבה כדי לייצר לחץ הפעלה של נוזל הידראולי. פונקציה משנית חשובה נוספת של המנועים היא התאמה מבוקרת. כדי לשפר את הדיוק, פוטנציומטרים שמממשקים למנועים הם בדרך כלל מכשירים מרובי סיבובים.
סיכום
רובוטים יכולים להיות מכשירים מורכבים מאוד הדורשים מגוון רחב של תנועות מונעות. מאמר זה נועד לתת סקירה על מגוון המכשירים שאיתם אתה מתמודד כבונה רובוטים. זה יהיה רעיון טוב להתחיל במחקר על ספקי ציוד רובוטי וציוד זמין. יש כמות עצומה של מוצרים זמינים כעת והאינטרנט מקל על מציאתם, למידתם על השימוש בהם. לא משנה מה הצרכים שלך, קצת כושר המצאה והנחישות שנראה שיש לכל בוני הרובוט צריכים לשרת אותך היטב.
סמדן וונדר
מנהל שיווק
'מנועים המשמשים לרובוטיקה'
- מנוע בסיס ניידות

- מנוע תחביב במהירות גבוהה
- מנוע כונן חגורה
- מנוע מכונית חריץ
- דופק פעל
- מנוע מותאם לזרוע
- צעד דו קוטבי עם מצביע

מנועים גדולים יותר מתאימים ביותר לבסיסי ניידות המאפשרים לרובוטים לתמרן את השטח. חלק מהמנועים הללו מגיעים עם תיבות הילוכים כדי לייצר את המהירות והמומנט הנמוכים יותר הנדרשים לצורך ניידות. הורדת המתח למנוע יכולה גם להאט אותו למהירות רצויה יותר. רק ניסוי יכול לקבוע אם המנוע שלך יפעל במתח נמוך יותר. אם כן, חסכת לעצמך הרבה צרות, אם לא, ישנן דרכים אחרות להאט את המנועים. ניתן להשתמש בכמה מנועים מהירים אם נעשה שימוש בהילוכים תולעים או גלגלי שיניים.
דוגמה לציוד הברגים ניתן לראות באיור הזרוע הרובוטית. כאשר המנוע מסתובב בכיוון השעון, מכלול הבריח נמשך אל המנוע והזרוע מתכווצת וכאשר הוא מסתובב נגד כיוון השעון, הזרוע נמתחת. למרות שמוט המנוע מסתובב במהירות, פעולת הזרוע איטית במידה ניכרת בגלל הפחתת הבורג. באיור הבא של מעגל המנוע אנו רואים מנוע DC הנשלט על ידי טרנזיסטור כוח. מתג ממסר (זריקה כפולה של קוטב כפול), קובע את הכיוון. טרנזיסטור Q1 צריך להיות טרנזיסטור הספק כדי לקחת את העומס הכבד של המנוע.
מנועים פעמיים
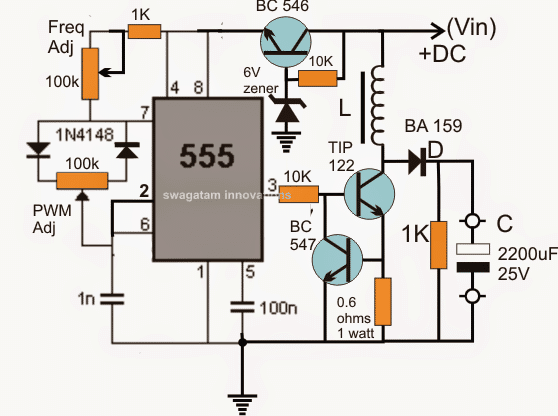
מנועים מסוימים שואבים הפחתת מהירות על ידי הפעלה מאותת DC פועמת. בדרך כלל אות זה הוא כמאה הרץ. ניתן לשנות את מהירות המנוע על ידי שינוי רוחב הדופק, ולא על ידי שינוי תדירות הדופק. מנועים מסוג זה ניתן למצוא בחנויות עודפי אלקטרוניקה וניתן לזהות אותם בקלות על ידי מחולל הדופק המחובר אליו. כל מנוע DC יכול להיות מונע על ידי מקור דופק, וכולל סכמה של מעגל כזה.
כפי שניתן לראות נבחר 555 טיימר כמתנד הכונן, המפיק תדר של בערך 100 הרץ. הנגד R1, והקבל C, מייצבים ומבודדים את מחולל הדופק מהקוצים שיוצר המנוע. מכיוון שמכשיר זה יכול לשאוב מאספקת חשמל של 6 עד 12 וולט, כדאי לשנות את הערך של הקבל C4 ו- C6 לקבלת תוצאות טובות יותר, תלוי באיזה מתח אתה משתמש. תפוקת הדופק נלקחת מסיכה שלוש של IC1 ומוזנת לסיכה שנייה של IC2, גם היא טיימר 555.
הטיימר השני משתנה לרוחב הדופק על ידי התאמת המתח המוזן לקבל C6 דרך הפוטנציומטר R5 והנגד R6. משך הדופק הוא הקובע את מהירות המנוע וניתן לכוונן את רוחב הדופק מ -10% ל -100%.
הטרנזיסטור Q1 מקבל את האות המאופנן ברוחב הדופק דרך הנגד R7. מכיוון ש- Q1 הוא מכשיר בעל זרם נמוך, הוא מעביר את האות ל- Q2, טרנזיסטור כוח שיכול להתמודד עם הדרישות הנוכחיות של המנוע. טרנזיסטורים אלה אינם קריטיים וכמעט כל סוג של טרנזיסטור בהספק נמוך נמוך יעבוד. הממסר יקבע לאיזה כיוון ינוע המנוע.
Stepper Motors
המורכב מבין כל המנועים הוא מנוע הצעדים. כמו השם המסתמן, המנוע מסתובב בהדרגות מעלות ומופעל בדופק. מידת הסיבוב המדויקת לכל צעד יכולה להשתנות מיצרן או דגם אחד למשנהו, אך 20 מעלות פופולריות ומייצרת 18 צעדים לפנייה שלמה אחת. ישנם שני סוגים בסיסיים של מנועי צעד, דו קוטבי וחד קוטבי. כפי שניתן לראות בתרשים המנוע הצעד, הדו קוטבי הוא פשוט מנוע המופעל על ידי סליל.
הסוג החד קוטבי הוא שני סלילים עם ברזים מרכזיים. אם מתעלמים מברזי המרכז, המנוע החד קוטבי יכול לפעול כסוג דו קוטבי. שני הסלילים במנוע צעד מוזנים פולסי צעד לסירוגין בקוטביות מסליל לסליל. מפה של תהליך זה מוצגת בתרשים העבודה כדי לייצג בצורה גרפית את הפעולה המוטורית. שלא כמו מנועי DC קונבנציונליים, מומנט פוחת עם המהירות. סוג מיוחד של יחידת כונן נדרש גם כדי לקדם את מנוע הצעד ויש לספק אותו עם המנוע. לא מומלץ לבנות יחידת בקרה אלא אם כן המנוע מסופק עם דף מפרט טוב הכולל המלצות רכיבים וסכמה מלאה.
המנוע עשוי לדרוש מאגרים לבידודו ממערכת הכונן, או לחייב ספק כוח נפרד. לא משנה מה הצרכים, הם עשויים להשתנות במידה ניכרת ממנוע אחד למשנהו. חנויות תחביבים הן הספקיות האמינות ביותר של מנועי צעד, ולמרות שעוד יש בחנויות אלקטרוניות עודפות, הם עשויים לא לכלול את המידע המפרט הדרוש
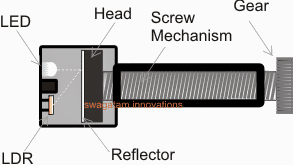
מנועי תור חלקיים
חלק מהפונקציות הרובוטיות דורשות סיבוב חלקי בלבד, כגון תנועות ראש או זרוע. הדרך הקלה ביותר להשיג זאת היא באמצעות עצירות מיקום והילוכים. איור של הפרטים המכניים של סוג מנוע זה ניתן לעיל. ניתן להשתמש במתגי מיקרו כחיישני עצירה כדי לכבות את הכוח ולאפס את הכיוון לפעולה הבאה.
הגלגל התחתון מחובר למנוע ואילו הגלגל העליון מופרד מהגלגל התחתון על ידי פיסת לבד מעגלית. כאשר הגלגל התחתון מסתובב הגלגל העליון מסתובב איתו עד שסיכת העצירה באה במגע עם מתג המיקרו. ישנם עיצובים שאינם מספקים הוראות להפסקת המנוע, ולכן ברגים פשוטים עם מרווחים יתפקדו כמפסיקי מנוע.
ביו-מוטור
ביו-מתכת הוא חומר מדהים שקיים כבר כמה שנים ויש לו מספר יישומים בתחום הרובוטיקה. אנו יכולים לראות באיור, כי פיסת חוט ביו-מתכת תתכווץ בחמישה אחוז מאורכו כאשר רק כמה וולטים מוחלים עליה. לאחר שנים של בדיקות, ביו-חוט הוכיח את עצמו כחזק, אמין, והופך להיות שימושי יותר עם הופעת מוצרים חדשים. זמן התגובה האיטי במקצת שלו הופך אותו לאידיאלי עבור יישומי זרועות וידיים רובוטיות, שם המטלטלות יהיו בעייתיות. פיסת חוט ארוכה יכולה לייצר תנועה משמעותית כאשר היא נמתחת לכל אורכו של זרוע רובוטית. כיום קיימות ערכות זרועות רובוטיות בשוק המסחרי המשתמשות במתכת הביו.
בהאסקר סינג
מנהל שיווק
 רובוטים תעשייתיים הם מכשירים שבמידה מסוימת משכפלים תנועה אנושית יחד עם הפחתת סכנה, ומספקים יותר כוח, דיוק והמשכיות. הם זקוקים למגוון רחב של תנועות מונעות בהתאם למצבי התפעול שלהם, השליטה, הכלים המשמשים והעבודה לביצוע. למנוע רובוטי תעשייתי צריך להיות פוטנציאל להתמודד עם מגוון רחב של חובות מאשר המנועים הרגילים כדי להתמחות במשימה מסוימת.
רובוטים תעשייתיים הם מכשירים שבמידה מסוימת משכפלים תנועה אנושית יחד עם הפחתת סכנה, ומספקים יותר כוח, דיוק והמשכיות. הם זקוקים למגוון רחב של תנועות מונעות בהתאם למצבי התפעול שלהם, השליטה, הכלים המשמשים והעבודה לביצוע. למנוע רובוטי תעשייתי צריך להיות פוטנציאל להתמודד עם מגוון רחב של חובות מאשר המנועים הרגילים כדי להתמחות במשימה מסוימת.
מנועים חשמליים משמשים לרוב ברובוטיקה תעשייתית בשל מקור יעיל במיוחד ועיצוב פשוט יחסית, מה שהופך אותם לאופציה פופולארית יותר מבחינת דירוג עלות-ביצועים בכל ההיבטים - התקנה, תחזוקה ושירות.
בהתאם לעבודה הדרושה, מנועים שונים משמשים למטרות שונות. לדוגמא מנועי DC משמשים לתנועות בכיוונים בכיוון השעון ולא בכיוון השעון, דוגמאות הן במנופים ומנופים, מנועים פעמיים משמשים לספק תנועות דופק באמצעות רוחב דופק DC, מנועי סיבוב חלקי משמשים לספק תנועות כמו ראש וזרוע והמורכבת ביותר. - מנועי צעד משמשים לספק סיבובים מדורגים במרווחי מעלות.
יתר על כן, בהתאם לסוג העבודה, מנועים בעלי דירוגים וגדלים שונים משמשים למטרות שונות. ישנם מספר סוגים של מנועים שלכל אחד מהם יש יישומים שונים במקומות שונים בהתאם לעבודה ולעיצוב הרובוט.
מוהאן קרישנה. ל
מנהל מכירות ותמיכה
רובוטים משמשים לבצע את העבודה שיכולה להיעשות על ידי בני אדם וישנן סיבות רבות מדוע רובוטים טובים יותר מבני אדם. 
ישנם שני סוגים עיקריים של רובוט:
רובוט נייד: מהלך זה על רגליים או מסלולים.
רובוט נייח: לזה יש בסיס קבוע.
רובוטים נייחים בדרך כלל יכולים לשמש לנשק רובוט לאיסוף חפצים או לביצוע עבודה אחרת הכוללת הגעה לאובייקט.
זרוע רובוט כוללת שלושה חלקים בסיסיים: -
- מפרק כתף
- מפרק כף היד
- בסיס קבוע
צריך רובוט עבור
- יכולת לעבוד בסביבה מהירה ומסוכנת.
- יכולת לחזור על משימות שוב ושוב.
- יכולת לעבוד בצורה מדויקת.
- יכולת לבצע משימות שונות.
- יְעִילוּת.
מנוע הוא מכשיר הממיר אנרגיה חשמלית לאנרגיה מכנית, כלומר, מכשיר אלקטרו-מכני. ישנם שני סוגים של מנועים כגון מנוע AC ומנוע DC
המנוע המשמש ברובוטיקה תעשייתית הוא סרוו מוטור. מנוע סרוו הוא מנוע חשמלי פשוט הנשלט בעזרת מנגנון סרוו. אם המנוע הנשלט מופעל על ידי זרם חילופין, זה נקרא מנוע סרוו AC אחרת מנוע סרוו DC. רוב מנועי הסרוו יכולים להסתובב בין 90 ל -180 מעלות. אפילו חלקם מסתובבים 360 מעלות מלאות או יותר. חלק מהיישומים של מנוע סרוו ברובוטיקה הם
- יישום מנוע סרוו ברובוטי, כלומר, רובוט פשוט לבחור ולמקם, הוא משמש לבחירת אובייקט ממצב אחד והצבת האובייקט במיקום שונה.
- נעשה שימוש במנוע סרוו במסועים
- בייצור תעשייתי והרכבת יחידות להעברת חפץ מתחנת הרכבה אחת לאחרת. לדוגמא: - תהליך מילוי בקבוקים.
- מנוע סרוו ברכב רובוטי כאן מנוע סרוו המשמש בגלגלים. מאז נעשה שימוש במנוע סרוו סיבובי רציף.
דינש פ
מנהל שיווק
 הוצגו רובוטים לצמצום העבודות הקשות האנושיות ולעזור ליצור מזל טוב לבני אדם להתפתחויות עתידיות. המונח רובוטים פירושו המכונה המחקה את המאפיינים האנושיים השונים. רובוטיקה כוללת ידע בהנדסת מכונות, אלקטרוניקה, חשמל ומדעי המחשב. מנועים המשמשים ברובוטים הם מנועי DC, מנועי צעד ומנועי סרוו
הוצגו רובוטים לצמצום העבודות הקשות האנושיות ולעזור ליצור מזל טוב לבני אדם להתפתחויות עתידיות. המונח רובוטים פירושו המכונה המחקה את המאפיינים האנושיים השונים. רובוטיקה כוללת ידע בהנדסת מכונות, אלקטרוניקה, חשמל ומדעי המחשב. מנועים המשמשים ברובוטים הם מנועי DC, מנועי צעד ומנועי סרוו
איפה,
- מנועי DC משמשים לסיבוב רציף
- מנועי צעד משמשים לסיבוב בכמה מעלות
- מנועי סרוו משמשים למיצוב, הם יכולים להשתמש במכוניות ובמטוסים
גאנש .J
מנהל שיווק 
רובוטים משמשים לבצע את העבודה שיכולה להתבצע על ידי בני אדם וגם מפחיתים את המאמץ והזמן האנושי ומשפרים את האיכות. מוטורים המשמשים לרובוטיקה תעשייתית הם
- מנועי זרם חילופין (AC)
- מנועי זרם ישר (DC)
- סרוו מוטורס
- Stepper Motors.