
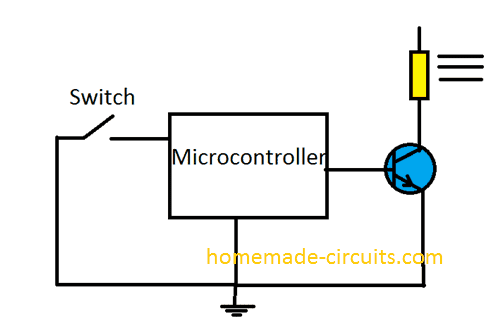
כפי שהשם מרמז, מאמר זה עתיד לתת מושג מדויק על מבנהו ועבודתו של בקר ה- PID. עם זאת נכנס לפרטים, הבה נקבל הקדמה על בקרי PID. בקרי PID נמצאים במגוון רחב של יישומים לבקרת תהליכים תעשייתיים. כ 95% מפעולות הלולאה הסגורה של אוטומציה תעשייתית המגזר משתמש בבקרי PID. PID מייצג פרופורציונלי-אינטגרלי-נגזר. שלושת הבקרים הללו משולבים בצורה כזו שהיא מייצרת אות בקרה. כבקר משוב, הוא מספק את תפוקת הבקרה ברמות הרצויות. לפני שהומצאו המעבדים, בקרת ה- PID הופעלה על ידי הרכיבים האלקטרוניים האנלוגיים. אך כיום כל בקרי ה- PID מעובדים על ידי המיקרו-מעבדים. בקרי לוגיקה מתוכנתים יש לך גם הוראות בקר PID מובנה. בשל הגמישות והאמינות של בקרי ה- PID, אלה משמשים באופן מסורתי ביישומי בקרת תהליכים.
מהו בקר PID?
המונח PID מייצג נגזרת אינטגרלית פרופורציונאלית וזה סוג של מכשיר המשמש לבקרת משתני תהליך שונים כמו לחץ, זרימה, טמפרטורה ומהירות ביישומים תעשייתיים. בבקר זה משתמשים במכשיר משוב לולאת בקרה לוויסות כל משתני התהליך.
סוג זה של בקרה משמש להפעלת מערכת לכיוון של מיקום אובייקטיבי ברמה אחרת. זה נמצא כמעט בכל מקום לבקרת טמפרטורה ומשמש בתהליכים מדעיים, אוטומציה ואינספור כימיקלים. בבקר זה, משוב במעגל סגור משמש לשמירה על התפוקה האמיתית משיטה כמו קרוב לאובייקטיבי, אחרת אם פלט בנקודת התיקון. במאמר זה נדון בעיצוב בקר ה- PID עם מצבי בקרה המשמשים בהם כמו P, I & D.
הִיסטוֹרִיָה
ההיסטוריה של בקר ה- PID היא, בשנת 1911 פותח בקר ה- PID הראשון על ידי אלמר ספרי. לאחר מכן, TIC (חברת Taylor Instrumental Company) יושמה בקר פנאומטי לשעבר עם כוונון מוחלט בשנת 1933. כעבור כמה שנים, מהנדסי בקרה הסירו את השגיאה במצב יציב שנמצא בתוך בקרים פרופורציונליים באמצעות כיוונון הסוף לערך כוזב כלשהו עד שהשגיאה לא הייתה אפסית.
כיוונון זה כלל את השגיאה המכונה בקר פרופורציונלי-אינטגרלי. לאחר מכן, בשנת 1940 פותח בקר ה- PID הפנאומטי הראשון באמצעות פעולה נגזרת להפחתת בעיות יתר.
בשנת 1942 זיגלר וניקולס הציגו כללי כוונון כדי לגלות ולהגדיר את הפרמטרים המתאימים של בקרי PID על ידי המהנדסים. סוף סוף נעשה שימוש נרחב בבקרי PID אוטומטיים בתעשיות באמצע 1950.
דיאגרמת חסימת בקר PID
מערכת לולאה סגורה כמו בקר PID כוללת מערכת בקרת משוב. מערכת זו מעריכה את משתנה המשוב באמצעות נקודה קבועה ליצירת אות שגיאה. בהתבסס על זה, זה משנה את תפוקת המערכת. הליך זה ימשיך עד שהשגיאה תגיע לאפס אחרת הערך של משתנה המשוב הופך להיות שווה לנקודה קבועה.
בקר זה מספק תוצאות טובות בהשוואה לבקר ON / OFF מסוג. בבקר מסוג ON / OFF, ניתן להשיג שני תנאים לניהול המערכת. ברגע שערך התהליך נמוך מהנקודה הקבועה, הוא יופעל. באופן דומה, הוא יכבה ברגע שהערך גבוה מערך קבוע. הפלט אינו יציב בבקר מסוג זה והוא יתנדנד לעיתים קרובות באזור הנקודה הקבועה. עם זאת, בקר זה יציב ומדויק יותר בהשוואה לבקר מסוג ON / OFF.

עבודה של בקר PID
עבודה של בקר PID
עם שימוש בבקר ON-OFF פשוט בעלות נמוכה, רק שתי מצבי בקרה אפשריים, כמו פועל לחלוטין או מלא כבוי. הוא משמש ליישום בקרה מוגבל כאשר שני מצבי הבקרה הללו מספיקים למטרת הבקרה. עם זאת אופי תנודתי של בקרה זו מגביל את השימוש בו ולכן הוא מוחלף על ידי בקרי PID.
בקר ה- PID שומר על הפלט כך שיש שגיאה אפסית בין משתנה התהליך לקביעת נקודה / רצוי על ידי פעולות במעגל סגור. PID משתמש בשלוש התנהגויות בקרה בסיסיות המוסברות להלן.
P- בקר
בקר פרופורציונלי או P- נותן פלט שביחס לשגיאה הנוכחית e (t). זה משווה את הנקודה הרצויה או ההגדרה עם הערך בפועל או ערך תהליך המשוב. השגיאה שנוצרה מוכפלת בקבוע פרופורציונלי כדי לקבל את הפלט. אם ערך השגיאה הוא אפס, אז פלט הבקר הזה הוא אפס.

בקר P
בקר זה דורש הטיה או איפוס ידני כאשר משתמשים בו לבד. הסיבה לכך היא שהיא לעולם אינה מגיעה למצב יציב. הוא מספק פעולה יציבה אך תמיד שומר על שגיאת המצב היציב. מהירות התגובה מוגברת כאשר הקבוע הקבוע היחסי עולה.

תגובת P-Controller
אני-בקר
בשל המגבלה של בקר ה- p שבו תמיד קיים קיזוז בין משתנה התהליך לבין נקודת המתיחה, יש צורך בבקר I, המספק פעולה נדרשת לחיסול השגיאה במצב יציב. הוא משלב את השגיאה לאורך פרק זמן עד שערך השגיאה מגיע לאפס. הוא מחזיק את הערך למכשיר הבקרה הסופי שבו השגיאה הופכת לאפס.

בקר PI
שליטה אינטגרלית מקטינה את תפוקתה כאשר מתרחשת שגיאה שלילית. זה מגביל את מהירות התגובה ומשפיע על יציבות המערכת. מהירות התגובה מוגברת על ידי ירידה ברווח האינטגרלי, קי.

תגובת בקר PI
באיור לעיל, כאשר הרווח של בקר ה- I פוחת, גם שגיאת המצב היציב ממשיכה ופוחתת. ברוב המקרים, נעשה שימוש בבקר ה- PI במיוחד כאשר אין צורך בתגובה מהירה.
בעת שימוש בבקר ה- PI, פלט ה- I-controller מוגבל לטווח מסוים כדי להתגבר על ה- לסיים אינטגרלי תנאים שבהם התפוקה האינטגרלית ממשיכה לגדול גם במצב שגיאה אפס, בגלל אי ליניאריות במפעל.
בקר D
לבקר ה- I אין יכולת לחזות את התנהגות העתיד של הטעות. אז זה מגיב כרגיל לאחר שינוי נקודת הקבע. בקר D מתגבר על בעיה זו על ידי צפייה בהתנהגות העתידית של השגיאה. תפוקתו תלויה בקצב שינוי הטעות ביחס לזמן, כפול קבוע נגזר. זה נותן את ההתחלה של הפלט ובכך מגביר את תגובת המערכת.

בקר PID
בתגובת האיור לעיל של D, הבקר הוא יותר בהשוואה לבקר ה- PI, וגם זמן ההתייצבות של הפלט יורד. זה משפר את יציבות המערכת על ידי פיצוי על פיגור בשלב שנגרם על ידי בקר I. הגדלת הרווח הנגזר מגדילה את מהירות התגובה.

תגובת בקר PID
אז לבסוף הבחנו כי על ידי שילוב שלושת הבקרים הללו, אנו יכולים לקבל את התגובה הרצויה למערכת. יצרנים שונים מתכננים אלגוריתמי PID שונים.
סוגי בקר PID
בקרי PID מסווגים לשלושה סוגים כמו ON / OFF, בקרי סוג פרופורציונליים וסטנדרטיים. בקרים אלה משמשים על בסיס מערכת הבקרה, המשתמש יכול להשתמש בבקר כדי לווסת את השיטה.
הפעלה / כיבוי
שיטת בקרה מופעלת היא הסוג הפשוט ביותר של מכשיר המשמש לבקרת טמפרטורה. יציאת המכשיר עשויה להיות מופעלת או כבויה ללא מצב מרכזי. בקר זה יפעיל את הפלט ברגע שהטמפרטורה תחצה את הנקודה הקבועה. בקר הגבלה הוא סוג מסוים של בקר / כיבוי המשתמש בממסר תפס. ממסר זה מאופס ידנית ומשמש לכיבוי שיטה ברגע שמגיעים לטמפרטורה מסוימת.
בקרה פרופורציונאלית
סוג זה של בקר נועד להסיר את הרכיבה על אופניים המחוברת באמצעות בקרת ON / OFF. בקר PID זה יפחית את ההספק הרגיל שמספק לכיוון המחמם ברגע שהטמפרטורה מגיעה לנקודה הקבועה.
לבקר זה יש תכונה אחת לשליטה על התנור כך שהוא לא יעלה על הנקודה הקבועה אולם הוא יגיע לנקודה הקבועה כדי לשמור על טמפרטורה יציבה.
ניתן להשיג פעולת פרופורציה זו באמצעות הפעלה וכיבוי של הפלט לפרקי זמן קטנים. פרופורציה זו תשנה את היחס בין זמן ON לזמן OFF לבקרת הטמפרטורה.
בקר PID מסוג סטנדרטי
סוג זה של בקר PID ימזג שליטה פרופורציונאלית באמצעות שליטה אינטגרלית ונגזרת כדי לסייע אוטומטית ליחידה לפצות שינויים במערכת. שינויים, אינטגרלים ונגזרים אלה באים לידי ביטוי ביחידות מבוססות זמן.
בקרים אלה מופנים גם באמצעות הדדיות שלהם, RATE & RESET בהתאמה. יש להתאים את תנאי ה- PID בנפרד, מכוון אחרת למערכת ספציפית עם הניסוי וכן לשגיאה. בקרים אלה יציעו את השליטה המדויקת והיציבה ביותר על שלושת סוגי הבקרים.
בקרי PID בזמן אמת
נכון לעכשיו ישנם סוגים שונים של בקרי PID זמינים בשוק. בקרים אלה משמשים לדרישות בקרה תעשייתיות כמו לחץ, טמפרטורה, רמה וזרימה. לאחר פרמטרים אלה נשלטים באמצעות PID, הבחירות כוללות להשתמש בבקר PID נפרד או PLC.
בקרים נפרדים אלה משמשים בכל מקום שנדרש לולאה אחרת, כמו גם בקרה אחרת בתנאים בכל מקום שהוא מורכב מימין הכניסה דרך מערכות גדולות יותר.
התקני בקרה אלה מספקים אפשרויות שונות לבקרת סולו ולולאה כפולה. בקרי PID מסוג עצמאי מספקים מספר תצורות של נקודות קבועות כדי לייצר כמה אזעקות אוטונומיות.
בקרים עצמאיים אלה כוללים בעיקר בקרי PID מבית Honeywell, בקרי טמפרטורה מיוקוגאווה, בקרי אוטומציה של OMEGA, סימנס ובקרי ABB.
PLCs משמשים כמו בקרי PID ברוב יישומי הבקרה התעשייתיים. ניתן לבצע את סידור בלוקי ה- PID בתוך PACs או PLC כדי לתת אפשרויות עדיפות לבקרת PLC מדויקת. בקרים אלה חכמים וחזקים יותר בהשוואה לבקרים נפרדים. כל PLC כולל את חסימת ה- PID במסגרת תכנות התוכנה.
שיטות כוונון
לפני שהעבודה של בקר ה- PID מתרחשת, יש לכוון אותו כך שיתאים לדינמיקה של התהליך שיש לשלוט עליו. מעצבים נותנים את ערכי ברירת המחדל עבור מונחי P, I ו- D, וערכים אלה לא יכלו לתת את הביצועים הרצויים ולעיתים מובילים לחוסר יציבות ולביצועי בקרה איטיים. סוגים שונים של שיטות כוונון מפותחים כדי לכוון את בקרי ה- PID ודורשים תשומת לב רבה מהמפעיל כדי לבחור את הערכים הטובים ביותר של רווחים פרופורציונליים, אינטגרליים ונגזרים. חלק מאלה מובאים להלן.
בקרי PID משמשים ברוב היישומים התעשייתיים, אך יש לדעת את ההגדרות של בקר זה בכדי להתאים אותו כראוי ליצירת הפלט המועדף. כאן, כוונון אינו אלא הליך קבלת תשובה אידיאלית מהבקר באמצעות קביעת רווחים פרופורציונליים הטובים ביותר, גורמים אינטגרליים ונגזרים.
את הפלט הרצוי של בקר ה- PID ניתן להשיג על ידי כוונון הבקר. ישנן טכניקות שונות הזמינות לקבלת התפוקה הנדרשת מהבקר כמו ניסוי וטעייה, זייגלר-ניקולס ועקומת תגובה בתהליך. השיטות הנפוצות ביותר הן ניסוי וטעייה, זייגלר-ניקולס וכו '.
שיטת ניסוי וטעייה: זוהי שיטה פשוטה של כוונון בקר PID. בזמן שהמערכת או הבקר פועלים, אנחנו יכולים לכוון את הבקר. בשיטה זו, ראשית עלינו להגדיר את ערכי Ki ו- Kd לאפס ולהגדיל את המונח הפרופורציונלי (Kp) עד שהמערכת מגיעה להתנהגות מתנדנדת. ברגע שהוא מתנדנד, התאם את Ki (מונח אינטגרלי) כך שתנודות יעצרו ולבסוף התאם את D כדי לקבל תגובה מהירה.
טכניקת עקומת תגובה לתהליך: זוהי טכניקת כוונון בלולאה פתוחה. זה מייצר תגובה כאשר מוחל קלט צעד על המערכת. בתחילה עלינו להחיל פלט בקרה כלשהו על המערכת באופן ידני ועלינו להקליט את עקומת התגובה.
לאחר מכן עלינו לחשב שיפוע, זמן מת, זמן עליית העקומה ולבסוף להחליף את הערכים הללו במשוואות P, I ו- D כדי לקבל את ערכי הרווח של מונחי PID.

עקומת תגובה בתהליך
שיטת זייגלר-ניקולס: זייגלר-ניקולס הציע שיטות לולאה סגורה לכוונון בקר ה- PID. אלה הן שיטת הרכיבה הרציפה ושיטת התנודה הרטובה. הנהלים לשתי השיטות זהים אך התנהגות תנודה שונה. בזה, ראשית, עלינו להגדיר את קבוע p- בקר, Kp לערך מסוים בעוד שערכי Ki ו- Kd הם אפסים. הרווח הפרופורציונלי גדל עד שהמערכת תנודה במשרעת קבועה.
רווח שבו המערכת מייצרת תנודות קבועות נקרא רווח אולטימטיבי (Ku) ותקופת התנודות נקראת התקופה האולטימטיבית (Pc). ברגע שמגיעים אליו, אנו יכולים להזין את הערכים של P, I ו- D בבקר PID על ידי טבלת זייגלר-ניקולס תלוי בבקר המשמש כמו P, PI או PID, כמוצג להלן.

שולחן זייגלר-ניקולס
מבנה בקר PID
בקר PID מורכב משלושה מונחים, כלומר שליטה פרופורציונאלית, אינטגרלית ונגזרת. הפעולה המשולבת של שלושת הבקרים הללו נותנת אסטרטגיית בקרה לבקרת תהליכים. בקר PID מתפעל את משתני התהליך כמו לחץ, מהירות, טמפרטורה, זרימה וכו '. חלק מהיישומים משתמשים בבקרי PID ברשתות מפל שבהן משתמשים בשניים או יותר ב- PID להשגת שליטה.

מבנה בקר PID
האיור לעיל מראה את מבנה בקר ה- PID. הוא מורכב מחסימת PID המספקת את תפוקתו לחסימת התהליך. תהליך / מפעל מורכב ממכשירי בקרה סופיים כמו מפעילים, שסתומי בקרה והתקני בקרה אחרים לבקרת תהליכים שונים בתעשייה / מפעל.
אות משוב ממפעל התהליך מושווה לנקודת הגדרה או אות התייחסות u (t) ואת אות השגיאה המקביל e (t) מועבר לאלגוריתם PID. על פי חישובי הבקרה הפרופורציונליים, האינטגרליים והנגזרים באלגוריתם, הבקר מייצר תגובה משולבת או פלט מבוקר המופעל על התקני בקרת מפעל.
כל יישומי הבקרה אינם זקוקים לשלושת אלמנטים הבקרה. שילובים כמו בקרות PI ו- PD משמשים לעתים קרובות ביישומים מעשיים.
יישומים
יישומי בקר ה- PID כוללים את הדברים הבאים.
יישום בקר ה- PID הטוב ביותר הוא בקרת טמפרטורה כאשר הבקר משתמש בקלט של חיישן טמפרטורה וניתן לקשר את הפלט שלו לאלמנט בקרה כמו מאוורר או תנור. באופן כללי, בקר זה הוא פשוט מרכיב אחד במערכת בקרת טמפרטורה. יש לבחון את המערכת כולה ולבחון אותה בעת בחירת הבקר הנכון.
בקרת טמפרטורה של תנור
באופן כללי, תנורים משמשים לכלול חימום וכן מחזיקים כמות עצומה של חומר גלם בטמפרטורות אדירות. בדרך כלל החומר שנכבש כולל מסה עצומה. כתוצאה מכך נדרשת כמות גבוהה של אינרציה וטמפרטורת החומר אינה משתנה במהירות גם כאשר מוחל חום עצום. תכונה זו מביאה לאות PV יציב בינוני ומאפשרת לתקופת הנגזרות לתקן ביעילות תקלה ללא שינויים קיצוניים ב- FCE או ב- CO.
בקר טעינה MPPT
מאפיין ה- V-I של תא פוטו-וולטאי תלוי בעיקר בטמפרטורת הטמפרטורה וכן בקרינה. בהתבסס על תנאי מזג האוויר, המתח הנוכחי וההפעלה ישתנו ללא הרף. לכן, חשוב מאוד לעקוב אחר ה- PowerPoint הגבוה ביותר של מערכת פוטו-וולטאית יעילה. בקר PID משמש למציאת MPPT על ידי מתן נקודות מתח וזרם קבועות לבקר PID. לאחר שינוי תנאי מזג האוויר אז הגשש שומר על זרם ומתח יציב.
הממיר של מוצרי אלקטרוניקה
אנו יודעים שממיר הוא יישום של מוצרי אלקטרוניקה, ולכן בקר PID משמש בעיקר בממירים. בכל פעם שממיר מתקשר באמצעות מערכת המבוססת על שינוי בתוך העומס, אז תפוקת הממיר תשתנה. לדוגמא, מהפך קשור לעומס, הזרם העצום מסופק לאחר הגדלת העומסים. לפיכך, פרמטר המתח וגם הזרם אינו יציב, אך הוא ישתנה בהתאם לדרישה.
במצב זה, בקר זה יפיק אותות PWM להפעלת ה- IGBT של המהפך. בהתבסס על השינוי בתוך העומס, אות התגובה מסופק לבקר ה- PID כך שייצור שגיאה n. אותות אלה נוצרים על בסיס אות התקלה. במצב זה, אנו יכולים להשיג קלט ופלט משתנים באמצעות מהפך דומה.
יישום של בקר PID: בקרת לולאה סגורה למנוע DC ללא מברשות
ממשק בקר PID
את העיצוב והממשק של בקר ה- PID ניתן לעשות באמצעות המיקרו-בקר Arduino. במעבדה, בקר ה- PID מבוסס Arduino מתוכנן באמצעות לוח ה- Arduino UNO, רכיבים אלקטרוניים, מצנן תרמו-אלקטרי, ואילו שפות תכנות התוכנה המשמשות במערכת זו הן C או C ++. מערכת זו משמשת לבקרת הטמפרטורה בתוך המעבדה.
הפרמטרים של PID לבקר ספציפי נמצאים פיזית. ניתן ליישם את הפונקציה של פרמטרים שונים של PID באמצעות הניגוד הבא בין צורות שונות של בקרים.
מערכת ממשקים זו יכולה לחשב ביעילות את הטמפרטורה באמצעות שגיאה של ± 0.6 ℃ ואילו טמפרטורה קבועה מווסתת באמצעות הבדל פשוט מהערך המועדף. המושגים המשמשים במערכת זו יספקו טכניקות זולות ומדויקות לניהול פרמטרים פיזיים בטווח מועדף במעבדה.
לפיכך, מאמר זה דן בסקירה כללית של בקר ה- PID הכוללת היסטוריה, דיאגרמת חסימה, מבנה, סוגים, שיטות עבודה, כיוונון, ממשק, יתרונות ויישומים. אנו מקווים שהצלחנו לספק ידע בסיסי אך מדויק אודות בקרי PID. הנה שאלה פשוטה לכולכם. בין שיטות הכוונון השונות, באיזו שיטה משתמשים בכדי להשיג עבודה מיטבית של בקר ה- PID ומדוע?
הנכם מתבקשים לתת את תשובותיכם בסעיף ההערות למטה.
נקודות זיכוי
תרשים חסימת בקר PID מאת ויקימדיה
מבנה בקר PID, בקר P, P - תגובת בקר ובקר PID על ידי blog.opticontrols
P - תגובת בקר על ידי controls.engin.umich
תגובת PI- בקר על ידי מ 'לאכול
תגובת בקר PID מאת ויקימדיה
שולחן זייגלר-ניקולס מאת controls.engin






{kind=link}
{kind=link}
{kind=link}
{kind=link}