ההודעה מסבירה כיצד להכין עגלה זולה אך עוצמתית בשלט רחוק אשר ניתנת לתמרון שמאלה, ימינה, קדימה ואחורה כנדרש, על ידי המשתמש באמצעות המכשיר המרוחק הנתון. הרעיון אינו מסתמך על מעגל מיקרו-בקר.
באחד מהפוסטים הקודמים שלי דנתי בנושא א מעגל מכונית צעצוע נשלט מרחוק פשוט , הרעיון הנוכחי של עגלה בשלט רחוק מעוצב בהשראת אותו רעיון אך נועד לשמש לנשיאת מטענים אדירים וכבדים הרבה יותר.
עגלה נשלטת מרחוק לשקעים קמעונאיים
עיצוב זה עשוי להיות מתאים ומתאים במיוחד לקניונים או חנויות קמעונאיות, שם הוא יכול להיות מיושם ככלי תחבורה קטן להובלת חומרים בתוך המתחם או להנחות היסוד בעזרת לחיצות בודדות של יחידת ה- Tx המרוחקת.
הצעד הראשון בבניית העגלה המוצעת בשלט רחוק יהיה לרכוש סט של מודולי RF סטנדרטיים של Rx / Tx מהסוחר האלקטרוני המקומי שלך או מכל חנות מקוונת, אני ממליץ לקנות מחנות מקוונת מכיוון שזה יהיה הרבה יותר קל ונוח. , אם כי יקר יותר.
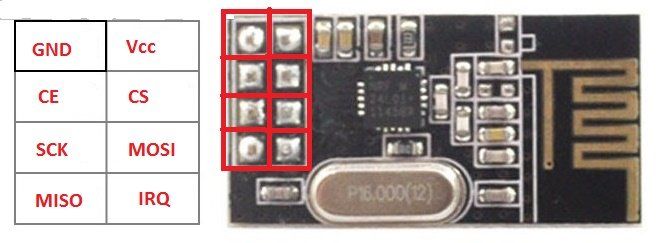
היחידות הנרכשות ייראו כמוצג להלן:
שימוש במודולי Tx, Rx 433MHz

יחידת הצבע החום בצד שמאל היא ה- Tx או יחידת המשדר ואילו המעגל הצמוד הרחב הוא ה- Rx או יחידת המקלט.
ניתן לראות את יחידת ה- Tx עם ארבעה כפתורים בצבע אדום המסומנים כ- A, B, C, D, ולוח ה- Rx עשוי להיות עד ל -4 ממסרים (תיבות צבעוניות שחורות).
ארבעת הלחצנים המתאימים של מודול ה- Tx מחוברים באופן אלחוטי להפעלת ארבעת הממסרים המתאימים של מודול ה- Rx.
ניתן לראות מחברים קבועים בקצוות הלוח (בצבע ירוק), מחברים אלה מסתיימים כראוי עם כניסות האספקה (+) (-) עבור לוח Rx וגם עם אנשי הקשר ממסר, לכל 4 הממסרים.
ממסר, כידוע, מורכב מחמישה אנשי קשר בסיסיים וסימוני הדופן שלהם: 2 פינים לסליל, אחד לקוטב ואחד כל אחד עבור N / C ו- N / O.
מכיוון שיש 4 ממסרים ביחידת Rx, תוכל למצוא 5 x 4 = 20 יציאות המשויכות לנקודות המחבר הרלוונטיות.
זו יכולה להיות משימה מייגעת לאתר בנפרד את סיומי הממסר על המחברים, לכן אני ממליץ להלחין חוטים ישירות על פינות הממסר על מנת לחסוך מעצמך מהמשימה לעיל, מאמץ זה יידרש מאוחר יותר בזמן שאנו יוצרים קשר עם היחידה עם מעגל הבקרה של העגלה.
בניית מעגל בקרת הממסר לעגלה
בשביל זה תדרשו קומץ ממסרים ודיודות. יש לדורג נכון את הממסרים על מנת להתמודד עם מנועי הגלגלים בעלי הספק גבוה של העגלה. אני ממליץ להשתמש בממסרי OEN עבור זה, כפי שמוצג בתמונה הבאה:

הדיודות שיידרשו במעגל דרייבר הממסר יכולות להיות דיודות 1N4007 הסטנדרטיות שלנו.
ניתן לראות את פרטי המעגל עבורו בתרשים הבא:
פרטי חיווט ממסר וסכמטי


איך עובד מעגל העגלה המרוחק
באמצעות הממסרים שצוינו לעיל והדיודות תצטרך לסיים את בניית לוח המעגל של הממסר הנ'ל, אשר עשוי להיעשות פשוט על פיסת לוח.
לאחר מכן עומדת לרשותנו משימה עיקרית והיא שילוב החוטים הירוקים המוצגים בתרשים לעיל עם לוח Rx בשלט הרחוק.
לפני השילוב נצטרך להוסיף כמה אופנות למודול Rx, כמוסבר להלן:
באמצעות חתיכות של חוטים מבודדים, שהופשטו כראוי והוצמדו בקצותיהם, המשיכו לחבר (באמצעות הלחמה) את כל סיכות המוט של הממסר וקשרו את המפרק המשותף הזה לקו החיובי של לוח ה- Rx.
כעת במצב זה אנו יכולים להניח שכאשר הממסרים אינם במצב מופעל (דרך המכשיר המרוחק) הקלט החיובי של הקוטב של כל ממסר יקושר לנקודות ה- N / C בהתאמה, וכאשר יופעל החיובי מהקוטב הסטו והתחברו לנקודות ה- N / O הרלוונטיות.
בקיצור, עם ההפעלה איש הקשר ללא פלט יקבל את האספקה החיובית ולכן אנו מעוניינים באספקה חיובית זו ממגעי הנמ'ש מכיוון שאלו יופעלו רק כאשר הממסרים מופעלים, מה שמשמע שכאשר ה- Tx (משדר ) לחצנים נלחצים.
לכן יש לחבר את כל פינות ה- N / O הרלוונטיות לחוטים הירוקים של מעגל דרייבר הממסר שצוין לעיל.
לאחר שהדבר נעשה, ה- Rx ישולב במודול נהג הממסר לביצוע כל התמרונים המיועדים של העגלה הנשלטת מרחוק, כלומר: קדימה, אחורה, תנועות ופניות שמאלה, ימינה.
הפעלת לוח נהגי הממסר
מכיוון שהממסרים בשלב נהג הממסר יהיו אחראים על העברת המנועים הכבדים המחוברים לגלגל העגלה, ההיצע לכך יצטרך להיות חזק באותה מידה, ולכן סוללות חומצה עופרת במחזור עמוק הופכות להיות אידיאליות ליישום זה.
בהנחה שהמנועים יהיו מדורגים ב 12 וולט, סוללת חומצה עופרת 40AH תהיה טובה מספיק כדי לאפשר לעגלה לנוע אפילו בעומסים כבדים יותר.
קביעת תצורת הגלגלים עם המנועים לתמרונים המיועדים
כפי שניתן לזהות באיור הבא, העגלה בשלט רחוק הנדונה תדרוש 4 גלגלים לתמיכה וגלגול המערכת.
עם זאת, רק שני הגלגלים הקדמיים יהיו אחראים לאפשר תמרונים אחוריים, קדימה, ימין ושמאל, ועל כן יידרשו להדק את המנועים בשני הגלגלים הקדמיים האלה של העגלה, כפי שמוצג בתמונה הבאה:

קביעת תצורה של חיבורי גלגל העגלה
הגלגלים האחוריים הם רק גלגלי דמה, קבועים רק כדי לאפשר גלגול חינם של העגלה, בתגובה לפקודות הגלגל הקדמי.
כפי שניתן לראות בתמונה לעיל, המודול המסומן כהרכבת PCB הוא לוח נהג הממסר, המודול המרוחק מסמל את לוח המקלט המרוחק Rx ואילו הסוללה היא סוללת 40 AH 12V עליה דנו בחלק הקודם של המאמר.
לאחר ההרכבה יתכן שתצטרכו לכוונן ולבדוק את חיבורי חוטי המנוע עם לוח נהג הממסר.
עבור תנועה קדימה ואחורה שני המנועים חייבים להיות מסונכרנים זה עם זה, מצד שני לשם ביצוע הימני או היפוך שמאלי, המנועים חייבים לעבור תנועה סיבובית הפוכה.
אם אתה מוצא שהמנוע אינו מתנהג באופן הנ'ל, יתכן שהוא יתוקן על ידי פשוט החלפת הקוטביות של אחד המנועים. זה יתקן מיד את המצב ויאלץ את המנועים ליישם את התמרונים שצוינו.
לבסוף ניתן להתאים כפתורי A. B, C, D או להחליף אותם לכל אחד מהתמרונים המתאימים על ידי כוונון קישורי החוטים הירוקים עם מודול Rx, בהתאם להעדפה האישית של המשתמשים.
קודם: כיצד לשנות את ה- SMPS ליציאת זרם ומתח מתכווננת הבא: חיישן מיקרוגל או מעגל חיישן דופלר