סריקת לייזר LIDAR או תלת מימד פותחה בתחילת שנות ה -60 לגילוי צוללות מכלי טיס, ובמודלים מוקדמים נעשה שימוש בהצלחה בתחילת שנות השבעים. כיום קשה לדמיין את המחקר הסביבתי ללא שימוש בטכניקות חישה מרחוק כמו איתור אור וטווח (LIDAR) ו איתור גלי רדיו וריווח (RADAR) . רזולוציה מרחבית ומתקדמת של המדידות, האפשרות לתצפית על האטמוספירה בתנאי הסביבה, ופוטנציאל הכיסוי של טווח הגובה מהקרקע לגובה של יותר מ -100 ק'מ מהווים את האטרקטיביות של מכשירי LIDAR.
ניתן להשתמש ב- LIDAR במגוון תהליכי האינטראקציה של הקרינה הנפלטת עם היסודות האטמוספריים כדי לאפשר קביעת משתני הסביבה הבסיסיים של המצב, כלומר טמפרטורה, לחץ, לחות ורוח, כמו גם את הסקר הגיאוגרפי, הנהר. גובה המיטה, חקר המוקשים, צפיפות היערות והגבעות, לימוד מתחת לים (Bathymetry).
איך LIDAR עובד?
עקרון העבודה של זיהוי אור ומערכת Ranging הוא באמת די פשוט. חיישן LIDAR המותקן על מטוס או מסוק. הוא מייצר רכבת דופק לייזר, שנשלחה אל פני השטח / המטרה כדי למדוד את הזמן ולוקח לחזור למקורו. החישוב בפועל למדידת מרחקו של פוטון אור חוזר לאובייקט וממנו מחושב על ידי
מרחק = (מהירות האור x זמן הטיסה) / 2
מרחקים מדויקים מחושבים לאחר מכן לנקודות על הקרקע וניתן לקבוע גבהים יחד עם בנייני קרקע, כבישים וצמחייה. גבהים אלה משולבים בצילום אוויר דיגיטלי כדי לייצר מודל גובה דיגיטלי של כדור הארץ.

מערכת גילוי אור וטווח
מכשיר הלייזר יורה פולסים מהירים של אור לייזר על פני השטח, חלקם עד 150,000 פולסים בשנייה. חיישן במכשיר מודד את משך הזמן שלוקח לכל דופק להחזיר לאחור. האור נע במהירות קבועה וידועה כך שמכשיר ה- LIDAR יכול לחשב את המרחק בינו לבין היעד בדיוק רב. על ידי חזרה על כך בהתקדמות מהירה המכשיר בונה 'מפה' מורכבת של המשטח שהוא מודד.
עם איתור טווחי אור מוטס , יש לאסוף נתונים אחרים בכדי להבטיח דיוק. מכיוון שהחיישן נע בגובה, יש לכלול מיקום וכיוון המכשיר כדי לקבוע את מיקום דופק הלייזר בזמן השליחה ומועד ההחזרה. מידע נוסף זה חיוני לשלמות הנתונים. עם איתור אור החלפה קרקעית ניתן להוסיף מיקום GPS יחיד בכל מיקום בו מכשיר הותקן.
סוגי מערכת LIDAR
מבוסס על הפלטפורמה
- LIDAR מבוסס קרקע
- לידאר מוטס
- LIDAR חללית

מערכות LiDAR מבוססות על פלטפורמה
אמרה על תהליך פיזי
- טווח מרחק LIDAR
- דיאל לידאר
- לידר דופלר
התנדב על תהליך פיזור
- שֶׁלִי
- ריילי
- ראמאן
- פלוּאוֹרסצֵנצִיָה
הרכיבים העיקריים של מערכות LIDAR
רוב מערכות זיהוי האור וההחלפה משתמשות בארבעה מרכיבים עיקריים

רכיבי מערכות גילוי אור ומטווח
לייזרים
הלייזרים מסווגים לפי אורך הגל שלהם. מערכות לגילוי אור ומטווח אור מוטסות משתמשות ב- N64 בשאיבת דיודות: לייזרים YAG ואילו במערות Bathymetric משתמשים ב- 532nm Nd שאוב בדיודה: לייזרים YAG החודרים למים עם הנחתה פחותה מהמערכת המוטסת (1064nm). ניתן להשיג רזולוציה טובה יותר עם פעימות קצרות יותר בתנאי שלגלאי המקלט ואלקטרוניקה יש רוחב פס מספיק לניהול זרימת הנתונים המוגברת.
סורקים ואופטיקה
המהירות בה ניתן לפתח תמונות מושפעת מהמהירות בה ניתן לסרוק אותן למערכת. מגוון של שיטות סריקה זמינות לרזולוציות שונות כגון אזימוט וגובה, סורק ציר כפול, מראות מישוריות תנודות כפולות ומראות מצולעות. סוג האופטיקה קובע את הטווח והרזולוציה שניתן לאתר על ידי מערכת.
פוטו גלאי ומקלט אלקטרוניקה
גלאי הפוטו הוא מכשיר הקורא ומתעד את האות המפוזר לאחור למערכת. ישנם שני סוגים עיקריים של טכנולוגיות גלאי פוטו, גלאי מצב מוצק, כגון פוטודיודות מפולת מפולת סיליקון ומכפילי פוטו.
מערכות ניווט ומיקום / GPS
כאשר חיישן זיהוי אור וטווח מותקן על לוויין מטוס או מכוניות, יש צורך לקבוע את המיקום המוחלט ואת כיוון החיישן כדי לשמור על נתונים שמיש. מערכות מיקום גלובליות (GPS) לספק מידע גיאוגרפי מדויק לגבי מיקום החיישן ויחידת מדידה אינרציאלית (IMU) מתעדת את הכיוון המדויק של החיישן באותו מקום. שני מכשירים אלה מספקים את השיטה לתרגום נתוני חיישנים לנקודות סטטיות לשימוש במגוון מערכות.

מערכות ניווט ומיקום / GPS
עיבוד נתונים LIDAR
מנגנון איתור האור והטווח האור פשוט אוסף נתוני גובה ויחד עם הנתונים של יחידת המדידה האינרציאלית ממוקמים עם המטוס ויחידת GPS. בעזרת מערכות אלו חיישן זיהוי האור והריכוז אוסף נקודות נתונים, מיקום הנתונים מתועד יחד עם חיישן ה- GPS. נדרשים נתונים לעיבוד זמן ההחזרה של כל דופק המפוזר בחזרה לחיישן וחישוב המרחקים המשתנים מהחיישן, או שינויים במשטחי כיסוי הקרקע. לאחר הסקר הנתונים מורידים ומעובדים באמצעות תוכנת מחשב שתוכננה במיוחד (LIDAR point Cloud Processing Processing Software). הפלט הסופי מדויק, אורך רישום גיאוגרפי (X), קו רוחב (Y) וגובה (Z) לכל נקודת נתונים. נתוני המיפוי של LIDAR מורכבים ממדידות גובה פני השטח ומגיעים באמצעות סקרים טופוגרפיים אוויריים. פורמט הקובץ המשמש ללכידת ושמירת נתוני LIDAR הוא קובץ טקסט פשוט. באמצעות נקודות נקודות גובה ניתן להשתמש בנתונים ליצירת מפות טופוגרפיות מפורטות. עם נקודות נתונים אלה אפילו הן מאפשרות גם ליצור מודל גובה דיגיטלי של פני הקרקע.
יישומים של מערכות LIDAR
אוקיאנוגרפיה
ה- LIDAR משמש לחישוב פלואורסצנטי של פיטופלנקטון וביומסה בשטח האוקיאנוס. הוא משמש גם למדידת עומק האוקיאנוס (bathymetry).

LiDAR באוקיאנוגרפיה
DEM (מודל גובה דיגיטלי)
יש לו קואורדינטות x, y, z. ניתן להשתמש בערכי גובה בכל מקום, בכבישים, בבניין, בגשר ובאחרים. זה קל לתפוס את גובה פני השטח, אורך ורוחב.
פיזיקה אטמוספרית
LIDAR משמש למדידת צפיפות העננים וריכוז חמצן, Co2, חנקן, גופרית וחלקיקי גז אחרים באטמוספירה העליונה.
צבאי
LIDAR שימש מאז ומתמיד את אנשי הצבא להבנת הגבול סביב הארץ. זה יוצר מפה ברזולוציה גבוהה למטרה הצבאית.
מֵטֵאוֹרוֹלוֹגִיָה
LIDAR שימש לחקר הענן והתנהגותו. LIDAR משתמש באורך הגל שלו כדי להכות חלקיקים קטנים בענן כדי להבין את צפיפות הענן.
סקר נהר
Greenlight (532 ננומטר) Lasar של ה- LIDAR משמש למדידת מידע תת-ימי נדרש להבנת עומק, רוחב הנהר, חוזק הזרימה ועוד. עבור הנדסת הנהר, נתוני החתך שלו מופקים מנתוני זיהוי האור וההחלפה (DEM) ליצירת מודל נהר, שייצור מפת שוליים של שיטפון.

סקר נהר באמצעות LIDAR
מיקרו-טופוגרפיה
איתור אור ומטווח הוא טכנולוגיה מדויקת וברורה מאוד, המשתמשת בדופק לייזר כדי להכות את האובייקט. פוטוגרמטריה רגילה או טכנולוגיית סקר אחרת אינם יכולים לתת ערך גובה פני השטח של חופת היער. אך ה- LIDAR יכול לחדור דרך האובייקט ולזהות את ערך השטח.
האם יש לך את המידע הבסיסי של LIDAR ויישומיו? אנו מכירים בכך שהמידע שניתן לעיל מבהיר את היסודות של תפיסת מנגנון זיהוי האור והטווח עם תמונות קשורות ויישומים שונים בזמן אמת. יתר על כן, כל ספק בנוגע למושג זה או ליישום פרויקטים אלקטרוניים כלשהם, אנא הוסף את הצעותיך והערותיך למאמר זה שתוכל לכתוב בסעיף ההערות למטה. הנה שאלה בשבילך, מהם הסוגים השונים של איתור אור וטווחים?



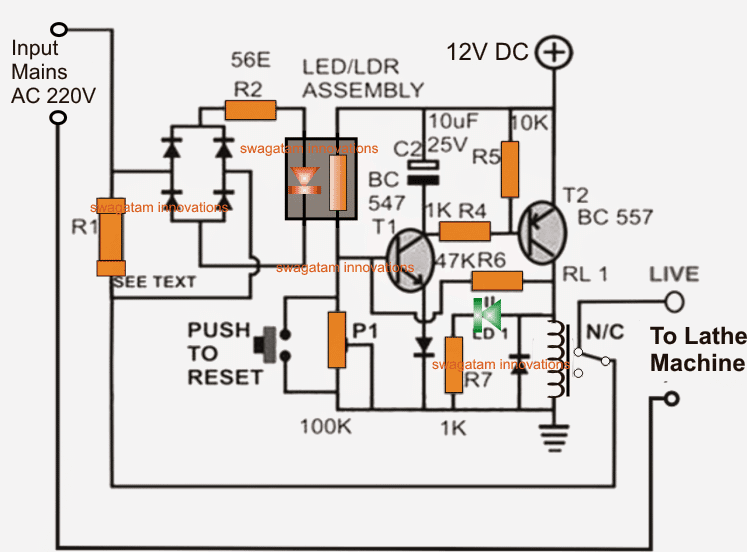

![מעגל גלאי יונים [גלאי פריקה סטטית]](https://electronics.jf-parede.pt/img/sensors-and-detectors/09/ion-detector-circuit-static-discharge-detector-1.jpg)