ההודעה מסבירה כמה מושגים במעגל שניתן להשתמש בהם לצורך המרה או שינוי של כל מהפך רגיל של גל מרובע לתכנון מהפך של גל סינוס מתוחכם.
לפני שנלמד את העיצובים השונים שהוסברו במאמר זה, יהיה מעניין לדעת מה הגורמים שהופכים בדרך כלל מהפך גל סינוס לנחשק יותר מתכנון גל מרובע.
כיצד תדר עובד בממירים
הממירים כוללים בעצם תדירות או תנודות ליישום פעולות הדחיפה וההיפוך. התדר כידוע הוא יצירת פולסים בתבנית אחידה ומחושבת כלשהי, למשל תדר מהפך טיפוסי עשוי להיות מדורג ב 50 הרץ או 50 פולסים חיוביים בשנייה.
צורת הגל התדר הבסיסית של מהפך היא בצורת פעימות גל מרובעות.
כפי שכולנו יודעים גל מרובע לעולם אינו מתאים להפעלת ציוד אלקטרוני מתוחכם כמו טלוויזיה, נגני מוסיקה, מחשבים וכו '.
זרם החילופין (זרם חילופין) שאנו רוכשים בשקע החשמלי הביתי שלנו מורכב גם מתדר זרם פועם, אך אלה הם בצורת גלי סינוס או גלי סינוס.
זה בדרך כלל ב 50Hz או 60Hz, תלוי במפרט השירות הספציפי של המדינה.
עקומת הסינוס שהוזכרה לעיל של צורת גל AC ביתית שלנו מתייחסת לפסגות המתח העולות באופן אקספוננציאלי המהוות את 50 המחזורים של התדר.
מכיוון שהזרם המקומי שלנו נוצר באמצעות טורבינות מגנטיות, צורת הגל היא מטבעה גל סינוס, ולכן אינה דורשת עיבוד נוסף והופכת לשימוש ישיר בבתים לכל סוגי המכשירים.
לעומת זאת בממירים, צורת הגל הבסיסית היא בצורת גלים מרובעים אשר זקוקים לעיבוד יסודי על מנת להפוך את היחידה לתואמת לכל סוגי הציוד.
ההבדל בין גל מרובע לגל סינוס
כפי שמוצג באיור, גל רבוע וסינוס עשויים להיות בעלי רמות מתח שיא זהות אך ערך ה- RMS או ערך הריבוע הממוצע של השורש עשויים שלא להיות זהים. היבט זה הוא מה שהופך גל מרובע לשונה במיוחד מגל סינוס למרות שערך השיא עשוי להיות זהה.
לכן מהפך גל מרובע שעובד עם 12 וולט DC יפיק תפוקה המקבילה לאמירה של 330 וולט בדיוק כמו מהפך של גל סינוס הפועל עם אותה סוללה, אך אם אתה מודד את תפוקת ה- RMS של שני הממירים, זה יהיה שונה משמעותית (330 וולט ו -220 וולט).

התמונה מציגה באופן שגוי 220 וולט כשיא, למעשה היא צריכה להיות 330 וולט
בתרשים שלמעלה, צורת הגל הירוקה היא צורת הגל הסינוסי, ואילו הכתום מתאר את צורת הגל המרובעת. החלק המוצלל הוא עודף ה- RMS שצריך ליישר עליו כדי להפוך את שני ערכי ה- RMS לקרובים ככל האפשר.
המרת מהפך גל מרובע לשווה גל סינוס, פירושו בעצם לאפשר למהפך הגל המרובע לייצר את ערך השיא הנדרש של נגיד 330 וולט ובכל זאת בעל RMS כמעט שווה לעמיתו של גל הסינוס.
כיצד להמיר / לשנות צורת גל מרובעת לשווה גל שווה
ניתן לעשות זאת על ידי גילוף דגימת גל מרובעת לצורת גל סינוס, או פשוט על ידי חיתוך צורת גל מרובעת לדוגמא לחתיכות קטנות המחושבות היטב כך ש- RMS שלה יתקרב מאוד לערך AC RMS רגיל.
לצורך גילוף גל מרובע לגל סינוס מושלם, אנו יכולים להפעיל מתנד גשר wien או ליתר דיוק 'מתנד בובבה' ולהאכיל אותו לשלב מעבד גל סינוס. שיטה זו תהיה מורכבת מדי ולכן אינה רעיון מומלץ ליישום מהפך גל מרובע קיים למהפך גל סינוס.
הרעיון האפשרי יותר יהיה לקצוץ את הגל המרובע המשויך בבסיס התקני הפלט לדרגת RMS הנדרשת.
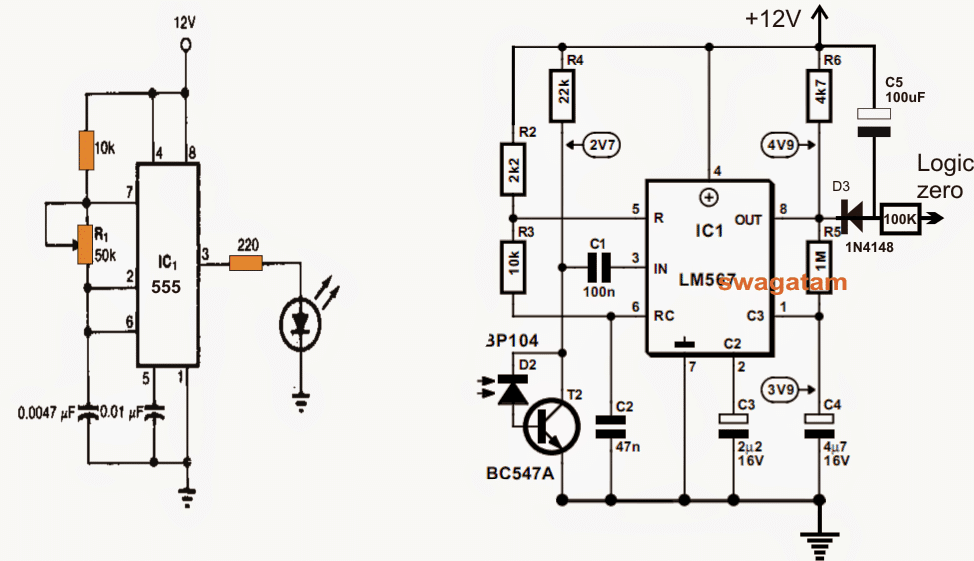
דוגמה קלאסית אחת מוצגת להלן:
התרשים הראשון מראה מעגל מהפך גל מרובע. על ידי הוספת קוצץ AMV פשוט אנו יכולים לפרק את הפולסים בבסיס המוספטים הרלוונטיים במידה הנדרשת.

גרסת מהפך שווה ערך לגל סינוס שונה מגרסת המעגל הנ'ל.
כאן ה- AMV הנמוך מייצר פולסים בתדירות גבוהה אשר ניתן לשנות את יחס הסימן / מרחב שלהם בעזרת VR1 מוגדר מראש. תפוקה מבוקרת PWM זו מוחלת על שערי המוספטים על מנת להתאים את הולכתם לערך RMS שנקבע.

תבנית צורת גל אופיינית צפויה מהשינוי לעיל:
צורת גל בשערי המוספט:

צורת גל בפלט השנאי:

צורת גל לאחר סינון נכון באמצעות משרנים וקבלים בפלט השנאי:


רשימת חלקים
R1, R2, = 27K,
R3, R4, R5, R6, R7, R8, R9, R10 = 1K אוהם,
C1, C2 = 0.47uF / 100V מתכת
C3, C4 = 0.1 uF
T1, T2, T5, T6 = BC547,
T3, T4 = כל 30V, 10amp mosfet, N-channel.
D1, D2 = 1N4148
VR1 = 47K קבוע מראש
שנאי = 9-0-9 וולט, 8 אמפר ( יש לבחור מפרטים לפי עומס הפלט לצורך אופטימיזציה נכונה של הכוח )
סוללה = 12V, 10AH
שיפור בשיעור יעילות
ההמרה או השינוי הנ'ל יספקו כ -70% יעילות בהתאמת RMS שהושגה. אם אתה מעוניין לקבל התאמה טובה ומדויקת יותר, כנראה שמעבד צורת גל IC 556 PWM יידרש.
אתה רוצה להתייחס למאמר זה שמראה את העיקרון שמאחורי שינוי צורת גל מרובעת לצורת גל סינוס באמצעות כמה IC555.
את הפלט מהמעגל הנ'ל ניתן להזין באופן דומה לשער או לבסיס התקני הכוח הרלוונטיים הקיימים ביחידת המהפך המרובעת הקיימת.
גישה מקיפה יותר עשויה להיות עדה במאמר זה שבו IC 556 משמש לחילוץ גל סינוס מדויק מבוסס PWM שווי ערך ממקור דגימת גל מרובע.
צורת גל זו משולבת בהתקני הפלט הקיימים ליישום השינויים המיועדים.
הדוגמאות שלעיל מלמדות אותנו את השיטות הפשוטות יותר באמצעותן ניתן לשנות כל מהפך גל מרובע רגיל קיים לתכנני מהפך גל סינוס.
המרה ל- SPWM
במאמר לעיל למדנו כיצד ניתן לייעל את צורת הגל של מהפך גל מרובע לקבלת צורת גל של גל סינוס על ידי קיצוץ הגל המרובע לחלקים קטנים יותר.
עם זאת, ניתוח מעמיק יותר מראה כי אלא אם כן צורת הגל הקצוצה איננה ממדית בצורה של SPWM, יתכן שלא תהיה אפשרות להשיג שווה ערך גבית נכונה.
כדי לעמוד בתנאי זה, מעגל ממיר SPWM הופך להיות חיוני לגילוף צורת הסינוס האידיאלית ביותר מהמהפך.
התרשים הבא מראה כיצד ניתן ליישם זאת ביעילות עם העיצובים שנדונו לעיל.

דרך אחד המאמרים הקודמים שלי הבנו כיצד ניתן להשתמש באופמפ ליצירת SPWM , ניתן היה לראות את אותה התיאוריה המיושמת במושג הנ'ל. נעשה שימוש כאן בשני מחוללי גלי משולש, האחד מקבל את הגל המרובע המהיר מהאסטאביל התחתון, ואילו השני מקבל את הגלים המרובעים האיטיים מהאסטא עליון ומעבד אותם ליציאות גל משולש מהירות ואיטיות בהתאמה.
גל משולש מעובד זה מוזנק על פני שתי הכניסות של אופמפ, שלבסוף ממיר אותם ל- SPWM או לרוחבי דופק של גל סינוס.
SPWM אלה משמשים לקיצוץ האותות בשער המוספטים אשר בסופו של דבר מעבירים את צורת הגל על פני השנאי המחובר ליצירת העתק מדויק של צורת גל סינוס טהורה בצד המשני של השנאי באמצעות אינדוקציה מגנטית.
קודם: מעגל דרייבר לייזר דיודות הבא: מעגל טיימר יחיד של Mosfet