
הצורך!
אחת הבעיות העיקריות העומדות בפני עיר עירונית כלשהי היא עומס התנועה. להיתקע בין תנועה כבדה זה כאב ראש לכל אדם ואדם שנוהג ברכב ואפילו למשטרת התנועה בשליטה על התנועה.
אחת הדרכים הוותיקות ביותר להתמודד עם תנועה הייתה הצבת שוטר תנועה בכל צומת ושולט באופן ידני בזרימת התנועה באמצעות איתות ידיים. עם זאת זה היה די מסורבל ואז הגיע הצורך בסוג אחר של שליטה - באמצעות אותות תנועה.
בקרי רמזור מסורתיים השתמשו בלוח זמנים קבוע קבוע מראש לזרימת תנועה לכל כיוון בצומת. הבקר היה בקר אלקטרו מכני המורכב ממערכות מכניות המופעלות חשמלית. הוא מורכב משלושה חלקים עיקריים - טיימר חיוג, סולנואיד ומכלול פקה. מנוע והרכבת הילוכים מפעילים את טיימר החיוג שבתורו אחראי להפעיל או להפעיל אנרגיה סולנואיד שבתורו מפעיל מכלול פקה האחראי לספק זרם לכל אינדיקציות אות. טיימר החיוג משמש כדי לספק חזרה על מרווחי משך קבוע.
עם זאת כל הרעיון של בקר רמזור בזמן קבוע אינו נוח לערים בהן זרימת התנועה משתנה. מסיבה זו יש צורך במערכת בקרת תנועה דינמית, השולטת באותות התנועה בהתאם לצפיפות התנועה.
איך נראית מערכת בקרת תנועה דינמית?
- תצוגה: זה הבסיסי תצוגת תמרור אשר נהג הרכב או הנוסע יכולים לראות. זה יכול להיות מנורות פריקה ליבון קונבנציונאלי או סידור של LED.

תצוגת תמרור
- יחידת גלאי: היחידה היא שמזהה נוכחות של כלי רכב ושולחת מידע זה לבקר שיעובד.
למעשה ישנם שני סוגים של גלאים:
- גלאי לולאות אינדוקטיבי: הוא מורכב מסליל תיל המוטבע בחריץ על פני הכביש אשר אטום בגומי. זה מגלה שינוי בתדירות. סליל המשרן מחובר לגלאי שמזהה את שינוי תדר התהודה של לולאת הסליל ובהתאם הוא שולט בהפעלת הממסר המשמש להפעלת אותות התנועה. בעיקרון זה עובד על העיקרון שכאשר מכונית נעה מעל סליל המשרן, ההשראות של הסליל פוחתת. השראות מופחתת זו גורמת לתדר התהודה או התנודה לגדול ויחידת האלקטרוניקה בהתאם שולחת פולסים חשמליים ליחידת הבקרה כדי לשלוט על החלפת הרמזורים. עם זאת חסרון של מערכת כזו הוא שלולאות המשרנים מועדות להפרעות אלקטרומגנטיות, כלומר קרינה אלקטרומגנטית ממכשירים אחרים יכולה גם להשפיע על השדה המגנטי ומכאן על השראות הסליל. הם גם נוטים יותר לכישלון ודורשים עלות התקנה גבוהה וגם גורמים לשיבוש התנועה.

בקרת אותות תנועה באמצעות גלאי לולאות אינדוקטיבי
- חיישנים המותקנים על הקטבים: זה יכול להיות סידור IRLED-פוטודיודה פשוט או יחידת גילוי וידאו שיכולה לזהות נוכחות של כלי רכב. זה עובד על העיקרון שכאשר מכונית עוברת בין משדר ה- IR למקלט ה- IR, אור ה- IR נחסם וכתוצאה מכך ההתנגדות של פוטודיודה עולה. ניתן להמיר שינוי זה בהתנגדות לפולסים חשמליים המשמשים לשליטה ברמזורים.

בקרת אותות תנועה באמצעות חיישנים המותקנים על מוטות
- יחידת בקר: היחידה היא זו שמקבלת את תפוקת הגלאי שנותנת אינדיקציה לנוכחות כלי רכב ובכך עושה חישוב של צפיפות התנועה ובהתאם היא שולטת ביחידת התצוגה. זה יכול להיות מחשב מבוסס מעבד או מיקרו-בקר פשוט.

יחידת בקרה
הדגמה פשוטה של בקרת איתותי תנועה מבוססי צפיפות באמצעות חיישני IR
ניתן ליצור אב-טיפוס של מערכת בקרת אותות תנועה באמצעות חיישני IR יחד עם מיקרו-בקר ונוריות לד אשר יכולות להוכיח ערך עבור יישום בזמן אמת של שליטת אותות תנועה בהתבסס על צפיפות התנועה. הצומת הנחשב כאן הוא צומת 4 צדדי עם זרימת תנועה בכל צד באופן אחד בלבד. המערכת מורכבת משלושת המרכיבים העיקריים הבאים:
- יחידת תצוגה: היא מורכבת משלושה נוריות - ירוקות, אדומות וענבות בכל צד של הצומת, עם סך הכל 12 נוריות נוריות.
- יחידת גלאי: היא מורכבת ממערך של פוטודיודה ושילוב IR LED בכל צומת המגלה נוכחות של כלי רכב על ידי גילוי שינוי בהתנגדות.
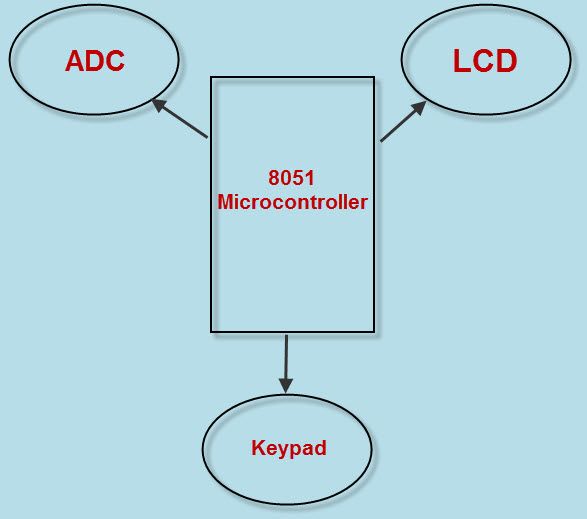
- יחידת בקר: הוא מורכב ממיקרו-בקר המקבל את פלט חיישן ה- IR ובהתאם הוא שולט בזוהר נוריות

אב-טיפוס לבקרת איתותי תנועה מבוססי צפיפות

דיאגרמת חסימה המציגה בקרת אותות תנועה על צפיפות
בתנאים רגילים, כלומר כשאין רכב על הכביש, משדר ה- IR או ה- IR LED מעבירים אור IR שמתקבל על ידי הפוטודיודה, שמתחילה להתנהל. כאשר הפוטו-דיודה מוליכה, הטרנזיסטור המתאים גם מוליך המספק פלט של אות לוגיקה נמוך ל המיקרו-בקר . אותו עיקרון עובד על כל שאר סידורי הטרנזיסטור של חיישני IR. המיקרו-בקר גורם לכל נורית LED לזמן קבוע.
עכשיו אם יש נוכחות של כלי רכב, התקשורת בין משדר ה- IR למקלט מופרעת, כלומר הפוטודיודה מקבלת פחות או יותר כמות אור מדיודת ה- IR ובהתאם לכך זרם הבסיס לטרנזיסטור מצטמצם, ובסופו של דבר גורם למוליך לעבור ל מצב כבוי. זה גורם לפלט של אות לוגי גבוה מהטרנזיסטור, למיקרו-בקר. המיקרו-בקר משנה את זמן הזוהר של הנורית הירוקה של הצומת המקביל לערך גבוה יותר.
כך שככל שמספר הרכבים גדל, האור הירוק זוהר לזמן רב יותר ומאפשר זרימה מהירה של תנועה מצד הצומת.
אז עד עכשיו היה לנו רעיון קצר לגבי שליטה תמרורי תנועה תוך שימוש באמצעים שונים. מה דעתך על שליטה דרך הרכב עצמו, כמו תקשורת בין הרכב לאותות התנועה. מערכת זו כבר נמצאת בשימוש בחלקים מסוימים של העולם. הכירו את זה ותנו משוב.
קרדיט צילום:
- תצוגת תמרור מאת ויקימדיה
- יחידת בקרה מאת מוצפן- tbn3








{kind=link}