בפוסט זה נלמד על מעגל פשוט המאפשר תכונת כוונון ידנית לתזמון הניצוץ של ה- CDI של האופנוע כדי להשיג הצתה מקדימה, הצתה מאוחרת או פשוט הצתה מתוזמנת רגילה.
לאחר מחקר מקיף בנושא הצלחתי כנראה לתכנן מעגל זה שיכול לשמש את כל רוכב האופנוע להשגת מהירות משופרת ויעילות דלק על ידי התאמת תזמון ההצתה של מנוע הרכב לפי הצורך, בהתאם למהירותו המיידית.
תזמון ניצוץ הצתה
כולנו יודעים שתזמון ניצוץ ההצתה שנוצר בתוך מנוע רכב הוא קריטי מבחינת יעילות הדלק שלו, חיי המנוע ומהירות הרכב, ניצוצות CDI בתזמון שגוי יכולים לייצר רכב שפועל בצורה גרועה ולהיפך.
זמן ההצתה המומלץ לניצוץ בתוך תא הבעירה הוא כאשר הבוכנה היא כ -10 מעלות לאחר שהיא חצתה את נקודת ה- TDC (Top Dead Center). סליל האיסוף מכוון כך שיתאים לזה ובכל פעם שהבוכנה מגיעה ממש לפני ה- TDC, סליל האיסוף מפעיל את סליל ה- CDI להפעלת הניצוץ, המכונה BTDC (לפני מרכז המתים העליון.
הבעירה המתבצעת בתהליך הנ'ל מייצרת בדרך כלל תפקוד מנוע טוב ופליטות.
עם זאת האמור לעיל עובד יפה רק כל עוד המנוע פועל במהירות ממוצעת מומלצת כלשהי, אך לאופנועים שנועדו להגיע למהירויות יוצאות דופן הרעיון הנ'ל מתחיל לתקול והאופנוע מונע מלהגיע למהירויות הגבוהות שצוינו.
סנכרון זמן ניצוץ עם מהירויות משתנות
זה קורה מכיוון שבמהירות גבוהה יותר הבוכנה נעה במהירות רבה מכפי שניצוץ ההצתה יכול לצפות אותה. למרות שמעגל CDI יוזם את ההדק כראוי, ומנסה להשלים את מיקום הבוכנה, עד שהניצוץ מסוגל להתלקח במצת, הבוכנה כבר נסעה הרבה לפני ה- TDC, מה שגרם לתרחיש בעירה לא רצוי עבור המנוע. זה בתורו גורם לחוסר יעילות, שמונע מהמנוע להגיע להגבלות המהירות הגבוהות שצוינו.
לכן על מנת לתקן את זמן הירי של ההצתה, עלינו לקדם מעט את הירי המצית על ידי פקודה על טריגר מעט מתקדם למעגל CDI, ולמהירויות איטיות זה פשוט צריך להיות הפוך ואת הירי צריך להיות מעוכב מעט בשביל המאפשר יעילות מיטבית עבור מנוע הרכב.
נדון בכל הפרמטרים הללו בהרחבה במאמר אחר, כרגע נרצה לנתח את השיטה שתאפשר לנו להשיג התאמות ידניות של תזמון ניצוץ ההצתה או להתקדם, לעכב או לעבוד כרגיל לפי המהירות. של האופנוע.
ייתכן שתזמון האיסוף אינו מהימן מספיק
מהדיון לעיל אנו יכולים להסיק כי ההדק של סליל האיסוף אינו הופך אך ורק לאמין עבור אופנועים במהירות גבוהה, ואמצעים כלשהם לקידום אות האיסוף הופכים להיות הכרחיים.
בדרך כלל זה נעשה באמצעות מיקרו-בקרים, ניסיתי להשיג את אותו הדבר באמצעות רכיבים רגילים, כנראה שזה נראה עיצוב ריאלי מבחינה הגיונית, אם כי רק מבחן מעשי יכול לאשר את השימושיות שלו.

תכנון מעבד CDI Advance Retard
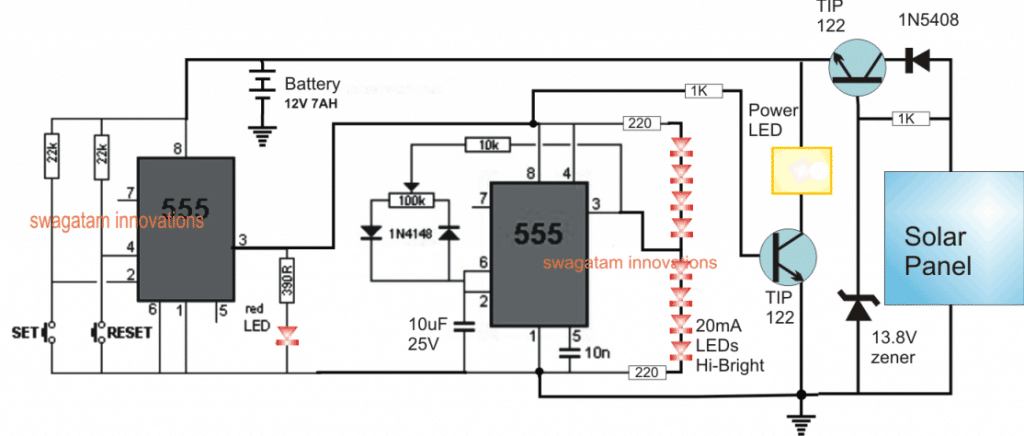
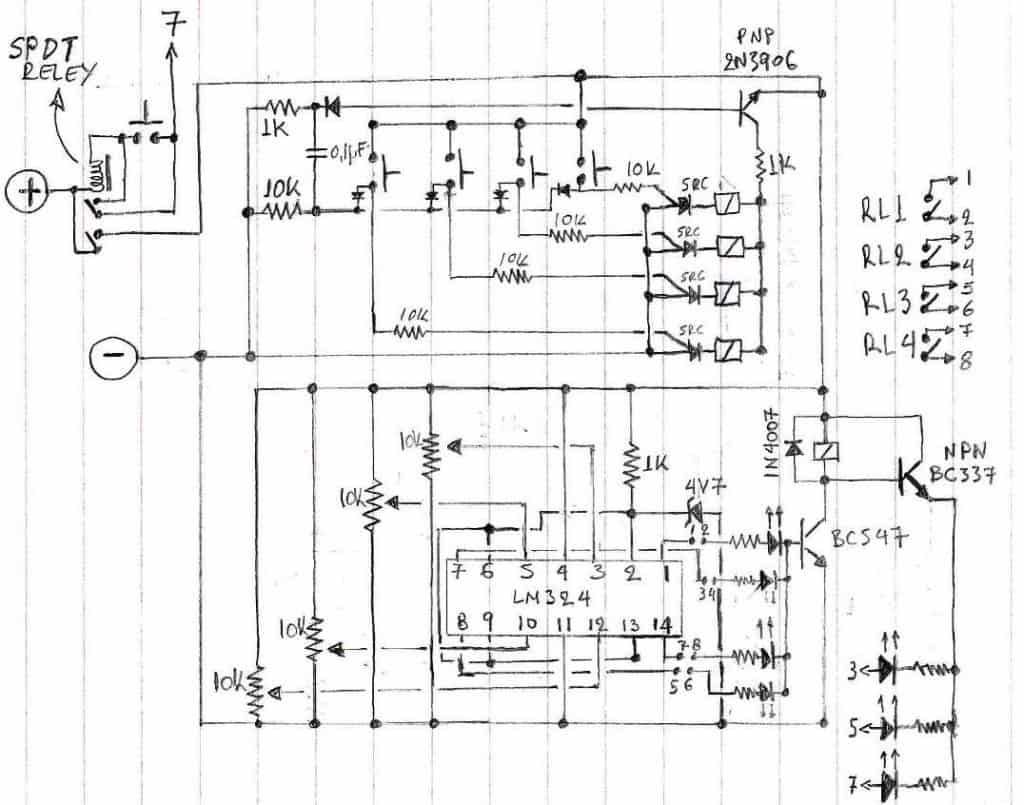
בהתייחס לעיצוב לעיל של מעגל טיימר להתקדמות ניצוץ CDI מתכוונן ומעכב טיימר, אנו יכולים לראות IC 555 רגיל ומעגל IC 4017 המותקנים בתקן '. מעגל אור לרודף LED ' מצב.
ה- IC 555 מוגדר כמו יציב שמייצר ומזין פעימות שעון לסיכה מס '14 של ה- IC 4017 אשר בתורו מגיב לדופקים אלה ומייצר היגיון גבוה' קופץ 'על פני פינות הפלט שלו החל מסיכה # 3 לסיכה # 11. ואז חזרה לסיכה מס '3.
בצד שמאל של התרשים ניתן לראות כמה NPN / PNP BJTs, אלה ממוקמים כדי לאפס את שני ה- IC בתגובה לאותות המתקבלים מסליל טנדר האופנועים.
אות סליל האיסוף מוזר לבסיס ה- NPN שמבקש מהמשקפיים לאפס ולהפעיל מחדש את התנודות, בכל פעם שסליל האיסוף חש מהפכה שהושלמה על ידי גלגל התנופה המשויך.
אופטימיזציה של תדר IC 555
כעת, תדר ה- IC 555 מותאם כך שכאשר סליל האיסוף מזהה מהפכה אחת ומאפס את ה- ICs, ה- IC 555 מסוגל לייצר כ- 9 עד 10 פולסים המאפשרים ל- IC 4017 להעלות גבוה עד לסיכה מספר 11 או לפחות עד לסיבוב מספר 9 שלו.
ניתן להגדיר את האמור לעיל לסיבובים המתאימים למהירות הסיבוב של האופנוע.
פירוש הדבר שבמהירויות סרק האותות סלילי האיסוף יאפשרו לפלטים של 4017 לעבור כמעט בכל פינות הסיבוב עד לאיפוסו בחזרה לסיכה מס '3.
עם זאת, בואו ננסה לדמות מה יקרה במהירויות גבוהות יותר.
תגובה במהירות רכב גבוהה יותר
במהירויות גבוהות יותר אותות הפיקאפ היו מייצרים אותות מהירים יותר מההגדרה הרגילה, וזה בתורו ימנע מ- IC 555 לייצר את 10 הפולסים שנקבעו, כך שעכשיו הוא יוכל ליצור נגיד סביב 7 פולסים או 6 פולסים ב בהינתן מהירות גבוהה יותר של הרכב.
זה בתורו ימנע מ- IC 4017 לאפשר לכל תפוקתו להיות גבוהה, במקום זאת כעת הוא יוכל להתנהל רק עד סיכה מס '6 או סיכה מס' 5, ולאחר מכן האיסוף יאלץ את ה- IC להתאפס.
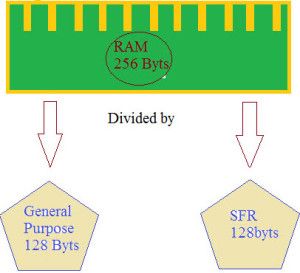
חלוקת גלגל התנופה לעשר חטיבות התקדמות / פיגור
מהדיון לעיל אנו יכולים לדמות מצב שבו במהירויות סרק, תפוקות ה- 4017 IC מחלקות את סיבוב גלגל התנופה לעשרה חלוקות, בהן האותות 3 או 4 pinout התחתונים יכולים להיחשב כמתאימים לאותות העשויים להיות המתרחש ממש לפני האות ההפעלה של סליל האיסוף בפועל, באופן דומה ניתן לדמות את ההיגיון הגבוה של pinout בסיכה מס '2,4,7 כדי להיות האותות המופיעים ממש לאחר שהפעלת סליל האיסוף בפועל חלפה.
לכן אנו יכולים להניח שהאותות בפינוטים התחתונים של ה- IC 4017 הם 'המקדמים' את אותות האיסוף בפועל.
כמו כן, מאחר שהאיפוס מהטנדר דוחף את ה- IC 4017 גבוה לסיכה מספר 3 שלה, ניתן להניח שפינואוט זה תואם את ההדק ה'מומלץ 'הרגיל של הטנדר .... בעוד שסיכות הזווית העוקבות אחר סיכה 3, כלומר ניתן להניח כי pinouts2,4,7 הם האותות המתאימים לאותות המאוחרים או לאותות ה'פיגור ', ביחס למפעילי האיסוף בפועל.
כיצד להגדיר את המעגל
לשם כך ראשית עלינו לדעת את הזמן הנדרש על ידי אות האיסוף להפקת כל פולסים חלופיים.
נניח שתקליט אותו בסביבות 100 אלפיות השנייה (ערך שרירותי), זה מרמז שה- 555 IC צריך לייצר פולסים בסיכה מס '3 בקצב 100/9 = 11.11 ms.
לאחר הגדרת זה, אנו יכולים להניח בערך שהפלטים מ- 4017 מייצרים היגיון גבוה בכל תפוקותיו אשר 'ייסוגו' בהדרגה כאשר אותות הטנדר יהפכו מהר יותר ויותר בתגובה למהירות הרכב.
זה יגרום לוגיקה 'גבוהה' נסוגה על פני הפינים התחתונים של IC 4017, ולכן במהירויות גבוהות יותר הרוכב יקבל אפשרות לנקוט באופן ידני בסטים התחתונים של הפינים להפעלת סליל CDI, כפי שמוצג בתרשים (ראה אפשרויות מתג בורר).
באיור אנו יכולים לראות מתג בורר אשר יכול לשמש לבחירת מפעילי pinout מה- IC 4017 IC להפעלת סליל CDI.
כפי שהוסבר לעיל, הסט התחתון של לוגיקות גבוהות הנסוגות לאחר שנבחר, יאפשר הפעלה מקדימה של סליל CDI ובכך יאפשר לרוכב להשיג ירי אוטומטי מראש של סליל CDI עם התאמה עצמית, אולם יש לבחור זאת רק כאשר הרכב פועל הרבה מעל למהירות הרגילה המומלצת.
באופן זהה אם הרוכב שוקל מהירות נמוכה יותר לרכב, הוא יכול להחליף את המתג לבחירת אפשרות העיתוי ה'מתעכבת ', הזמינה על פני הפינים שנמצאים ממש אחרי סיכה מספר 3 של IC 4017.
במהלך המהירויות הרגילות המומלצות האופנוען יכול לבחור בסיכה מס '3 כמוצא ההדק עבור ה- CDI שיאפשר לרכב ליהנות מנסיעה יעילה במהירות הרגילה הנתונה.
תיאוריית העיתוי המקדימה / פיגור לעיל נכתבה בהשראת ההסבר כפי שבא לידי ביטוי בסרטון הבא:
קישור הווידאו המקורי שאליו ניתן לצפות ב- Youtube מופיע להלן:
כיצד להפוך את הרעיון הנ'ל לאוטומטי
בחלק הבא אנו לומדים את השיטה לשדרוג הרעיון הנ'ל לגרסה אוטומטית באמצעות שלבי טכומטר ושלבי מעגל אופמפ. הרעיון התבקש על ידי מר מייק ותוכנן על ידי מר אבו-האפס.
מפרט טכני
ברכות!
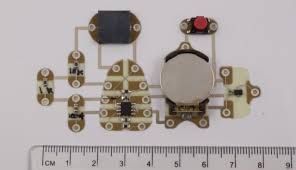
דברים מעניינים כאן, אני כרגע פורש עקבות על CAD והייתי רוצה לחרוט את זה על איזה PCB אבל אני מעדיף שהמבחר של תקן מראש או פיגור יישאר לאלקטרוניקה ...
אני קצת חדש בזה אבל מרגיש כאילו יש לי מושג טוב למדי על המושגים המשחק ...
השאלה שלי היא, האם יש מאמרים שיש לך על אוטומציה של הבחירה המקדימה על בסיס סל'ד מנוע? אה ורשימת חלקים של הרכיבים השונים תהיה מרהיבה ???
תודה, מייק
העיצוב, מאת אבו-חפס
היי סווגתם
מתייחס למאמר שלך על התקדמות, מעכב ניצוץ הצתה CDI לשיפור יעילות האופנוע במהירות גבוהה , אני רוצה להגיב שעדיין לא נתקלתי בשום מצב בו נדרשת RETARD (או ליתר דיוק DELAY) של ירי הניצוצות. כפי שציינת, בעיקר אופניים (אופני מירוץ) אינם מצליחים לבצע סל'ד גבוה (בדרך כלל מעל 10,000 סל'ד) ולכן נדרש ירי של ניצוץ מראש. היה לי כמעט אותו רעיון בראש, אבל לא יכולתי לבדוק פיזית.
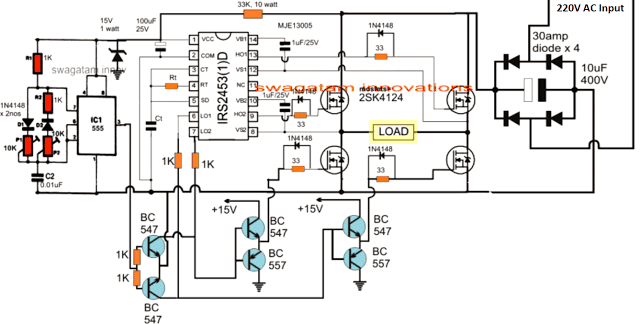
להלן התוספת המוצעת שלי למעגל שלך:
לאוטומציה של החלפת ניצוץ הירי בין NORMAL ל- ADVANCE, א מעגל טכומטר ניתן להשתמש בכמה רכיבים נוספים. מד המתח של מעגל הטכומטר מוסר והפלט מוזר לפין מס '2 של IC LM741 המשמש כמשווה. מתח ייחוס של 10 וולט מוקצה בסיכה מס '3. מעגל הטכומטר נועד לתת פלט של 1 וולט מול 1000 סל'ד ולכן 10 וולט מתייחס ל -10,000 סל'ד. כאשר הסל'ד הוא יותר מ -10,000, בסיכה מספר 2 יש יותר מ -10 וולט ומכאן שהפלט של 741 יורד (אפס).
פלט זה מחובר לבסיס ה- T2 ומכאן, מתגי פלט נמוכים ב- T2. אם הסל'ד נמוך מ- 10,000 התפוקה עוברת גבוה ומכאן T2 מכבה. במקביל T4, שמוגדר כממיר אות, הופך את הפלט לנמוך וזהה מחובר לבסיס של T3 ומכאן, T3 מופעל.
בברכה
אבו-חפס

קודם: כיצד להשיג אנרגיה חופשית מטוטלת הבא: הכנת מעגל רגולטור מתח 3.3V, 5V עם דיודות וטרנזיסטורים