במאמר זה נלמד כיצד ליצור מעגל מתקן לחיטוי ידיים בעלות נמוכה אך אוטומטית, אשר יאפשר חלוקת נוזל החיטוי על ידי המשתמש ללא מגע או ללא מגע.
מעגל חיטוי ידיים ללא מגע זה מאפשר למשתמש לגשת אוטומטית לנוזל החיטוי על הידיים ללא צורך בהפעלה או נגיעה ידנית במשאבת בקבוק החיטוי. התכונה מבטיחה שלווירוסים אין שום סיכוי להתפשט באמצעות נגיעה פיזית בבקבוק החיטוי ובחלקי התפעול שלו.
עם זאת, כדי להיות אוטומטית, המערכת תדרוש חיישן כלשהו כדי לזהות נוכחות של אדם, או יד אנושית מתחת ליחידת המתקן.
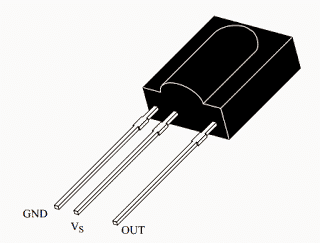
לשם כך אנו מעסיקים את יחידת החיישנים האנושית הבסיסית ביותר שהיא PIR, או מכשיר אינפרא אדום פסיבי .
פרטי עבודה בסיסיים
PIR נועד לזהות את חום האינפרא אדום מגוף האדם ולייצר דופק חשמלי מתאים בסיכת הפלט שלו.
דופק זה משמש להפעלת טיימר חד פעמי מבוסס שלב נהג ממסר שמפעיל את הממסר לרגע, ומניע סולנואיד טעון קפיץ.
הסולנואיד דוחף את פיר המשאבה של בקבוק חיטוי כדי לחלק את הנוזל שבידי המשתמש. ניתן לדמיין את המושג בתמונה הבאה.

הסולנואיד בתמונה שלעיל מחובר לפלט של מעגל מונו.
מעגל מונו-יציב הוא תצורה הגורמת לפלט גבוה רגעי בתגובה להדק קלט רגעי. הפלט נשאר גבוה לתקופה קבועה קבועה מראש ללא קשר למשך טריגר הקלט.
במעגל מתקן החיטוי האוטומטי הזה המונוסטבל מופעל על ידי PIR ברגע ש- PIR מזהה יד אנושית מתקרבת.
המונוסטבל בתורו מפעיל את הסולנואיד לרגע זמן כלשהו כפי שנקבע על ידי רכיבי התזמון של RC.
הפעלת הסולנואיד גורמת לציר המרכזי שלו לדחוף ולמשוך במהירות לכיוון האנכי, ולחץ על ידית המשאבה של בקבוק החיטוי פעם אחת.
בסופו של דבר זה גורם לבקבוק להפיץ את הנוזל המחטא לידי המשתמש.
ברגע שהמשתמש מושך את ידו מהמערכת, ה- PIR מכבה, והמוניסטול גם מבטל את כל המערכת עד שמשתמש אחר מביא את ידו בטווח ה- PIR כדי לחזור על ההליך.
ניתן לתכנן את מעגל ההפעלה החד-פעמי ליחידת חלוקת החיטוי האוטומטית המוצעת באמצעות מונו-טרנזיסטור או באמצעות מכשיר פופולרי מעגל מונו יציב מבוסס IC 555 .
נדון בשתי הגרסאות בדיונים הבאים:
מעגל מתקן לחיטוי ידיים טרנזיסטורי

הגרסה הטרנזיסטורית של המעגל נראית פשוטה מאוד. כאשר מכשיר ה- PIR מזהה התערבות אנושית, הוא מוליך ושולח דופק לבסיס ה- T1 דרך C1.
הזרם דרך C1 מפעיל באופן מיידי את T1, אשר בתורו מפעיל את T2 וגם את משאבת הסולנואיד.
בינתיים, C1 נטען במהירות ומונע כניסה של זרם נוסף לבסיס T1, ובכך חוסם את פעימות ה- DC החוזרות מיציאת ה- PIR. זה מבטיח שהמערכת תעבוד רק לרגע עבור כל זיהוי, ואז תיכבה עד שתסיר את היד ותתחיל מחזור חדש.
הפעלה אחת זו של T1 / T2 מבטיחה שעומס הסולנואיד המחובר יופעל ליצירת פעולת דחיפה-משיכה אחת על הציר המגנטי שלו.
הציר מפעיל את ידית משאבת החיטוי כדי להפיץ מנה אחת של נוזל החיטוי על יד המשתמש.
ניתן להבחין כי הסולנואיד מחובר בצד הפולט של הטרנזיסטור, במקום בצד הקולט הרגיל. חיבור הפולט מבטיח למעשה שהסולנואיד יופעל באמצעות דחיפה עדינה של רכה בתגובה לטעינה של הקבל C2 10F.
אם הוא מחובר בצד הקולט יביא לדחיפת הסולנואיד באמצעות דחף פתאומי, שאולי לא נראה מרשים במיוחד.
פישוט העיצוב לעיל
ניתן לפשט עוד יותר את החיטוי הידני הנטול טרנזיסטור ללא מגע, באמצעות ממסר כפי שמוצג בתכנון הבא:

באמצעות IC 555

האיור לעיל מראה מעגל מונו סטנדרטי IC 555. כאן, כאשר פינ 2 מקורקע, גורם לפלט 3 לפלט להיות גבוה לתקופה שהוחלט על ידי ערכי R1, C1 או המוצר שלהם.
בתכנון מתקן חיטוי אוטומטי זה, ה- R1, C1 מחושב לייצר תפוקה גבוהה בערך שנייה, בתגובה לאות נמוך ב- pin2.
כאשר ה- PIR מזהה יד אנושית, הוא מוליך ומפעיל את הטרנזיסטור BC547 אשר בתורו מפעיל את pin2 של ה- IC.
זה גורם באופן מיידי לפין 3 לגובה ולהפעיל את הטרנזיסטור TIP142 ואת הסולנואיד המחובר, ליצור דחיפה ארוכה של שנייה ואז משיכת כיבוי על פיר הסולנואיד. המשיכה נוצרת על ידי מתח הקפיץ המצורף על פיר הסולנואיד .
שוב, בגרסה זו ניתן לראות גם את הסולנואיד מחובר בצד הפולט של הטרנזיסטור על מנת לאפשר דחיפה רכה על פיר הסולנואיד בהתאם לתגובת הטעינה של C3.
תצוגה מונפשת של כל המערכת ניתנת לדמיון בתמונת ה- GIF הבאה.

חיישן רעיוני אינפרא אדום TCRT5000
מכיוון ש- PIR הוא חיישן יקר יחסית, חלופה זולה יותר לייצור חיטוי ידני אוטומטי עשויה להיות באמצעות חיישן ה- IR המשקף TCRT5000.
החיישן הוא שילוב פשוט של משדר פוטו-דיודה IR ומקלט תמונות IR ארוז זה לצד זה, בתוך חבילה אחת כמוצג להלן:

ניתן להבין את המאפיינים של מודול חיישן ה- IR הקרוב מהנתונים הבאים:

מתרשים הפריסה הפנימי של החיישן אנו יכולים לראות בבירור כי המודול מורכב מפוטודיודה אשר פולטת את אות ה- IR לעבר המטרה, ומקלט פוטו-טרנזיסטור הסמוך אשר ממוקם כדי לקבל את אות ה- IR המשתקף מהיעד.
כדי להתאים את החיישן במכונת חיטוי ידנית אוטומטית, אנו יכולים שוב ליישם את סוס העבודה שלנו IC 555 מונוסטבל, כפי שמוצג להלן:

המעגל הוא די מובן מאליו, אך אם יש לך בעיות בהבנת הפרטים, אתה תמיד יכול להרגיש חופשי להשתמש בתיבת ההערות למטה לצורך התחלת דיון.
באמצעות HC-SR04 ו- IC555

המעגל המוצג לעיל יכול לשמש ליישום מתקן חיטוי אוטומטי באמצעות מודול גלאי הקרבה הקולי, HC-SR04, וכמה מעגלי IC 555.
הצד השמאלי IC 555 מוגדר כמולטיברטור מדהים ואילו מעגל IC 555 בצד ימין מחובר כמולטיבטטור מונו.
יש לחשב את ערכי רכיבי RA, RB, C אסטטיביים כדי לאפשר 10US ON ו- 60us OFF PWM מ- pin3 של IC זה.
יש לכוונן את רכיבי התזמון של RA ו- C של המונוסטבל כדי לייצר פלט חד שנתי בגובה 1 שנייה מהסיכה 3 של שלב זה.
פלט זה יכול לשמש להפעלת משאבת ההנפקה, המנוע, הסולנואיד וכו 'בהתאם לדרישת התכנון.
קודם: כיצד עובדים מעגלי RC הבא: כיצד פועלים מדחומי אינפרא אדום ללא מגע - איך מכינים אחד כזה