במאמר זה נדון בתכנון מעגלים שיעזור למיטוב המומנט של מנוע אינדוקציה המשמש ברכבים חשמליים על ידי ניתוח צריכתו הנוכחית.
באמצעות מהפך IC 555 לבקרת טוק
העיצוב מיועד במיוחד עבור כלי רכב חשמליים אשר נועדו לעבוד עם מנועי אינדוקציה, ולכן כאן כלול מהפך להפעלת מנוע האינדוקציה מסוללה.
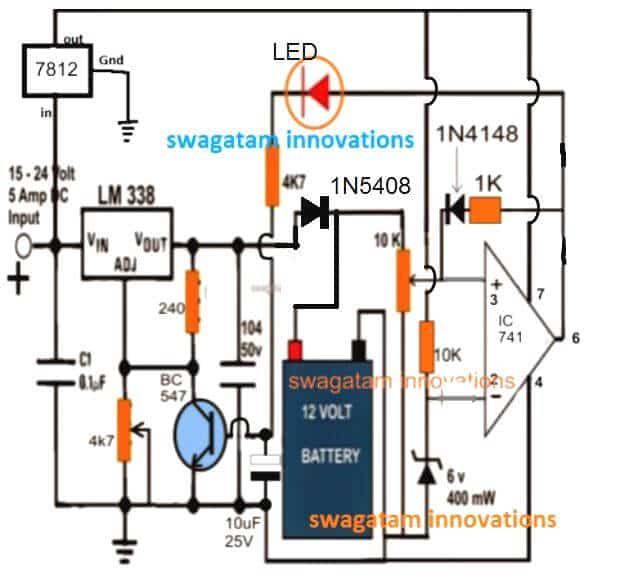
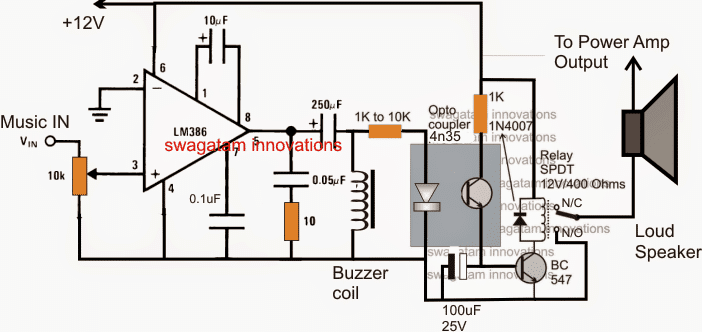
במעגל ייעול המומנט האוטומטי המוצע עבור מנוע אינדוקציה ניתן לראות בתרשים הבא. מכיוון שהוא מיועד לרכב חשמלי, כלול מעגל מהפך ובנוי באמצעות IC 555.

ה- IC 555 יחד עם המוספטים והשנאי הנלווים יוצרים א מעגל מהפך הגון להנעת מנוע אינדוקציה חד פאזי שצוין מסוללת 12 וולט או 24 וולט. עבור סוללת 24 וולט יש לעבור על קטע ה- IC
עד 12 וולט דרך שלב ווסת מתח מתאים.
אם נחזור לעיצוב האמיתי, כאן עלינו לוודא שמנוע האינדוקציה המחובר לשנאי מתחיל במהירות נמוכה יותר ומתחיל לצבור תאוצה, מהירות ומומנט ככל שהוא נטען.
שימוש בטכניקת PWM
בעיקרון כדי ליישם זאת, PWM הופך לטכניקה הטובה ביותר וגם בעיצוב זה אנו מנצלים את היתרון של ה- IC 555 מובנה באופטימיזציה של PWM תכונה. כפי שכולנו יודעים שהסיכה מספר 5 של ה- IC 555 יוצרת את מתח הבקרה
כניסת ה- IC, המגיבה למתח משתנה להתאמת רמת רוחב הדופק בסיכה מס '3 שלה, כלומר לרמות פוטנציאליות גבוהות יותר בסיכה מס' 5, רוחב הדופק בסיכה מס '3 מתרחב ועבור פוטנציאלים נמוכים יותר בסיכה מס' 5 , רוחב הדופק בסיכה מס '3 הולך וצר.
על מנת לתרגם את מפרט העומס למתח משתנה בסיכה מס '5, אנו זקוקים לשלב מעגל המסוגל להמיר את העומס העולה על מנוע האינדוקציה לפוטנציאל בעלייה יחסית.
ההבדל בסיכה מספר 5 של IC 555
תפקיד חיישן המגבלה הנוכחי
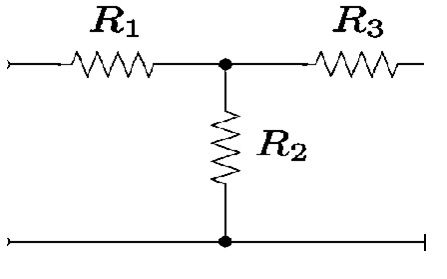
זה נעשה על ידי הצגת א נגד החישה הנוכחי Rx , אשר הופך את הזרם העולה שנמשך על ידי העומס להפרש פוטנציאלי שעולה באופן יחסי על עצמו.
את ההבדל הפוטנציאלי הזה חשה ה- BC547 והעביר את הנתונים אל ה- LED המחובר, שהוא למעשה ה- LED בתוך מצמד אופט LED / LDR מיוצר בבית באופן ידני.
כאשר בהירות ה- LED עולה בתגובה לצריכת זרם עולה על ידי עומס צמוד, התנגדות ה- LDR יורדת באופן יחסי.
ניתן לראות את ה- LDR המהווה חלק מרשת המחלקים הפוטנציאלית על פני הקלט הלא-הפוך של Opamp, ולכן כאשר התנגדות ה- LDR נופלת, הפוטנציאל שבסיכה מספר 3 של האופמפ עולה, אשר בתורו גורם למתח עולה במוצא בהתאמה. של האופמפ.
זה קורה מכיוון שהמפתח מוגדר כמעגל עוקב מתח כלומר נתוני המתח בסיכה 3 שלו ישוכפלו בדיוק בסיכת הפלט שלו מס '6 ובאופן מוגבר.
מתח עולה זה בהתאמה בסיכה מס '6 של האופמפ בתגובה לעומס העולה על מנוע האינדוקציה מזין פוטנציאל עולה בסיכה מס' 5 של IC555. זה בתורו גורם ל- PWM הצר ההתחלתי בסיכה מס '3 של IC 555 להתרחב.
כאשר זה קורה, ממסרי ההופכים מתחילים להעביר זרם רב יותר לשנאי המאפשר הספק גבוה יחסית למנוע האינדוקציה, והתהליך מאפשר לעומס לפעול בעוצמה רבה יותר ובאופטימלי.
ביצועים.
לעומת זאת ברגע שהעומס מצטמצם, גם הזרם דרך Rx מצטמצם מה שמוריד את בהירות ה- LED ופוטנציאל הפלט של ה- opamps יורד בהתאמה, מה שגורם לבסוף ל- IC 555 לצמצם את ה- PWM שלו למוספטים ולהפחית את קלט הכוח השנאי.
שימוש במיטוב מומנט למנועי הליכון
מעגל האופטימיזציה של מומנט מומנט לעיל עבור מנועי אינדוקציה מיועד לכלי רכב חשמליים, אולם אם אתה מעוניין להפעיל מנוע DC רגיל בהספק כגון מנוע טחנת דריכה , במקרה זה ניתן היה פשוט לחסל את קטע השנאי, ולחבר את המנוע ישירות כמצוין בתרשים הבא:

אני בטוח שיש לך הרבה שאלות מודאגות, אז אל תהסס להעלות אותן באמצעות הערותיך היקרות. כל השאלות הקשורות שלך יענו בהקדם
קודם: מעגל מהפך גשר מלא SG3525 הבא: מעגל מתג תפס ברצף 10 שלבים