המאמר המוצג כאן מסביר מעגל בקר מהירות מנוע AC בלולאה סגורה פשוט מאוד שיכול לשמש לשליטה במהירויות מנוע זרם חד פאזי.
המעגל זול מאוד ומשתמש ברכיבים אלקטרוניים רגילים ליישומים הנדרשים. המאפיין העיקרי של המעגל הוא שמדובר בסוג לולאה סגורה, כלומר המהירות או המומנט של המנוע לעולם לא יכולים להיות מושפעים מהעומס או מהמהירות של המנוע במעגל זה, להפך, המומנט הוא ביחס בעקיפין ל גודל המהירות.
מבצע מעגל:
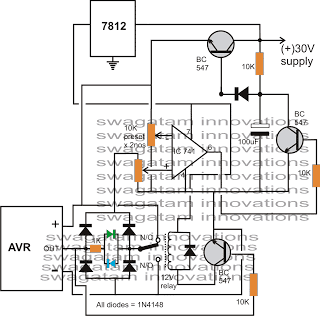
בהתייחס לדיאגרמת המעגל של בקר המנוע החשמלי לולאה סגורה חד-פאזית המוצעת, ניתן להבין את הפעולות הכרוכות בנקודות הבאות:
עבור מחזורי המחצית החיוביים של קלט ה- AC, הקבל C2 נטען דרך הנגד R1 והדיודה D1.

הטעינה של C2 נמשכת עד שהמתח על פני קבל זה הופך לשווה ערך למתח הזנר המדמה של התצורה.
המעגל המחובר סביב הטרנזיסטור T1 מדמה ביעילות את פעולת דיודת הזנר.
הכללת הסיר P1 מאפשרת לכוונן את המתח של 'דיודת הזנר' הזו. באופן מדויק, המתח שפותח על פני T1 נקבע באופן מילולי על ידי היחס בין הנגדים R3 ו- R2 + P1.
המתח על פני הנגד R4 נשמר תמיד שווה ל -0.6 וולט השווה למתח ההולכה הנדרש של מתח הפולט הבסיסי של T1.
לכן המשמעות היא שמתח הזנר המוסבר לעיל צריך להיות שווה לערך שניתן לרכוש על ידי פתרון הביטוי:
(P1 + R2 + R3 / R3) × 0.6
רשימת חלקים למעגל בקר מהירות מנוע AC בלולאה סגורה לעיל
- R1 = 39K,
- R2 = 12K,
- R3 = 22K,
- R4 = 68K,
- P1 = 220K,
- כל הדיודות = 1N4007,
- C1 = 0.1 / 400 וולט,
- C2 = 100uF / 35V,
- T1 = BC547B,
- SCR = C106
- L1 = 30 סיבובים של חוט SWG 25 מעל מוט פריט 3 מ'מ או 40 uH / 5 וואט
איך העומס ממוקם מסיבה מיוחדת
חקירה מדוקדקת מגלה שהמנוע או העומס אינם מוצגים במצב הרגיל אלא הוא מחובר בדיוק לאחר ה- SCR, בקתודה שלו.
זה גורם להציג תכונה מעניינת עם מעגל זה.
המיקום המיוחד של המנוע לעיל בתוך המעגל הופך את זמן הירי של ה- SCR לתלוי בהפרש הפוטנציאלי בין EMF האחורי של המנוע לבין 'מתח הזנר' של המעגל.
זה פשוט אומר שככל שהמנוע נטען יותר, כך SCR יורה מהר יותר.
ההליך די מדמה תפקוד של לולאה סגורה כאשר המשוב מתקבל בצורה של EMF אחורי שנוצר על ידי המנוע עצמו.
עם זאת המעגל קשור לחסרון קל. אימוץ SCR פירושו שהמעגל יכול להתמודד רק עם 180 מעלות של בקרת פאזה ולא ניתן לשלוט על המנוע בכל טווח המהירות אלא רק עבור 50% ממנו.
חסרון נוסף הקשור בשל האופי הזול של המעגל הוא שהמנוע נוטה לייצר שיהוקים במהירויות נמוכות יותר, אולם ככל שהמהירות מוגברת נושא זה נעלם לחלוטין.
הפונקציה של L1 ו- C1
L1 ו- C1 כלולים לבדיקת RFs בתדירות גבוהה שנוצרים עקב קיצוץ פאזה מהיר על ידי SCR.
צריך פחות לומר שהמכשיר (SCR) חייב להיות מותקן על גוף קירור מתאים לקבלת תוצאות מיטביות.
מעגל בקרת קידוח מהירות EMF בחזרה
מעגל זה משמש בעיקר לבקרת המהירות היציבה של מנועי פצעים מסדרה קטנה יותר, כפי שנמצא בכמה מקדחות יד חשמליות וכו '. המומנט והמהירות נשלטים על ידי פוטנציומטר P1. תצורת פוטנציומטר זו מציינת עד כמה ניתן להפעיל טריאק.

כאשר מהירות המנוע יורדת בדיוק מתחת לערך הקבוע מראש (עם חיבור עומס), אז EMF האחורי של המנוע יורד. כתוצאה מכך, מתח סביב R1, P1 ו- C5 עולה כך שהטריאק מופעל מוקדם יותר ומהירות המנוע נוטה לעלות. חלק מסוים של יציבות המהירות מושגת באופן זה.
קודם: כיצד לייצר חשמל ממי ים - 2 שיטות פשוטות הבא: מעגל מתג שלט רחוק מבוסס GSM מבוסס טלפון סלולרי