מעגל ה- VFD התלת-שלבי ( תוכנן על ידי ) יכול לשמש לבקרת המהירות של כל מנוע זרם זרם מוברש תלת פאזי או אפילו מנוע זרם חשמלי ללא מברשות. הרעיון התבקש על ידי מר טום
שימוש ב- VFD
ניתן ליישם את מעגל ה- VFD התלת-פאזי המוצע ברוב מנועי ה- AC 3-פאזיים בהם יעילות הוויסות אינה קריטית מדי.
ניתן להשתמש בו במיוחד לבקרה מהירות מנוע אינדוקציה של כלוב סנאי עם מצב לולאה פתוחה, ואולי גם במצב הלולאה הסגורה שעליה נדון בחלק המאוחר של המאמר.
מודולים נדרשים עבור מהפך תלת פאזי
לצורך תכנון מעגל הכונן התלת-ממדי המוצע בתלת-ממד או כונן בתדרים משתנים, נדרשים למעשה שלבי המעגל הבסיסיים הבאים:
- מעגל בקר מתח PWM
- מעגל הנהג בגשר H / צד גבוה / צד נמוך
- מעגל מחולל 3 שלבים
- מעגל ממיר מתח לתדר להפקת פרמטר V / Hz.
בואו ללמוד את פרטי התפקוד של השלבים הנ'ל בעזרת ההסבר הבא:
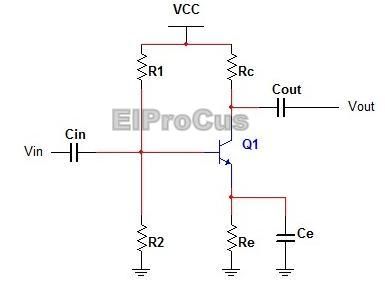
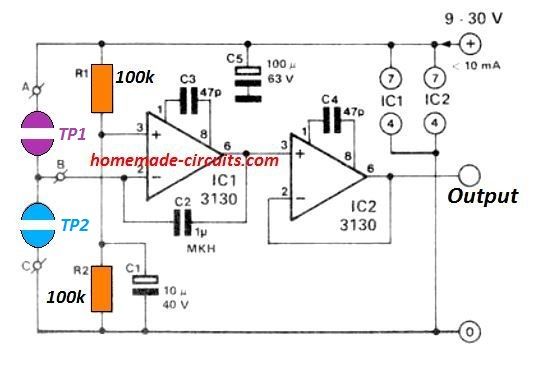
ניתן לראות מעגל בקר PWM פשוט בתרשים המופיע להלן:

בקר ה- PWM
כבר שילבתי והסברתי את תפקוד שלב גנרטור ה- PWM הנ'ל אשר בעצם מיועד להפקת פלט PWM משתנה על פני pin3 של IC2 בתגובה לפוטנציאל המיושם ב- pin5 של אותו IC.
קביעת התצוגה המוקדמת 1K המוצגת בתרשים היא כפתור הבקרה של RMS, אשר יכול להיות מותאם כראוי לרכישת הכמות הפרופורציונאלית של מתח המוצא בצורה של PWMs בסיכה 3 של IC2 להמשך עיבוד. זה מוגדר לייצר יציאה מתאימה שעשויה להיות שווה לרשת החשמל 220V או 120V AC RMS.
מעגל הנהג H-Bridge
התרשים הבא שלהלן מציג מעגל נהג תלת פאזי בעל שבב יחיד H-bridge באמצעות IC IRS2330.
העיצוב נראה פשוט כיוון שרוב המורכבויות מטופלות על ידי שבבים המובנים במעגלים מתוחכמים.
אות תלת פאזי מחושב היטב מוחל על פני כניסות HIN1 / 2/3 ו- LIN1 / 2/3 של ה- IC דרך שלב מחולל אותות תלת פאזי.
התפוקות של IC IRS2330 ניתן לראות משולב עם 6 mosfets או רשת גשר IGBT, אשר הניקוז שלהם מוגדר כראוי עם המנוע שיש לשלוט עליו.
שערי המוספט / IGBT בצד הנמוך משולבים בסיכה IC2 מספר 3 של שלב מעגל הגנרטורים של PWM הנדון לעיל לצורך הזרקת הזרקת ה- PWM לשלב הגשר. תקנה זו מסייעת בסופו של דבר למנוע לקבל את המהירות הרצויה לפי ההגדרות (באמצעות ההגדרה המוקדמת 1k בתרשים הראשון).

בתרשים הבא אנו מדמיינים את מעגל מחולל האותות התלת פאזי הנדרש.

קביעת תצורה של מעגל המחולל לשלושה שלבים
הגנרטור התלת-פאזי בנוי סביב כמה שבבי CMOS CD4035 ו- CD4009 אשר מייצרים אותות 3-פאזיים בממדים מדויקים על פני הפינים.
תדירות האותות התלת-פאזיים תלויה בשעוני הקלט המוזנים אשר אמורים להיות פי 6 מאותם האות התלת-פאזי המיועד. כלומר, אם תדר התלת-פאזי הנדרש הוא 50 הרץ, שעון הקלט צריך להיות 50 x 6 = 300 הרץ.
זה גם מרמז כי השעונים שלעיל יכולים להיות מגוונים על מנת לשנות את התדירות האפקטיבית של IC הנהג, אשר בתורו יהיה אחראי על שינוי התדר התפעולי של המנוע.
אולם מכיוון ששינוי התדרים הנ'ל צריך להיות אוטומטי בתגובה למתח המשתנה, ממיר מתח לתדר הופך להיות חיוני. השלב הבא דן במעגל מתח ממיר לתדרים מדויק ופשוט ליישום הנדרש.
כיצד ליצור יחס V / F קבוע
בדרך כלל במנועי אינדוקציה, על מנת לשמור על יעילות אופטימלית של מהירות המנוע וטואק, יש לשלוט על מהירות החלקה או על מהירות הרוטור, אשר בתורו מתאפשרת על ידי שמירה על יחס V / Hz קבוע. מכיוון שהשטף המגנטי של הסטטור תמיד קבוע ללא קשר לתדירות אספקת הקלט, ניתן לשלוט במהירות על מהירות הרוטור שמירה על יחס V / Hz קבוע .
במצב לולאה פתוחה, ניתן לעשות זאת בערך על ידי שמירה על יחסי V / Hz קבועים מראש, והטמעה ידנית. לדוגמא בתרשים הראשון ניתן לעשות זאת על ידי כוונון מתאים של ה- R1 והקביעה המוגדרת מראש 1K. R1 קובע את התדר ו- 1K מכוון את ה- RMS של הפלט, ולכן על ידי התאמה מתאימה של שני הפרמטרים נוכל לאכוף את הכמות הנדרשת V / Hz באופן ידני.
עם זאת כדי לקבל שליטה מדויקת יחסית על מומנט מנוע אינדוקציה ומהירות, עלינו ליישם אסטרטגיה של לולאה סגורה, שבה יש להזין את נתוני מהירות ההחלקה למעגל העיבוד לצורך התאמה אוטומטית של יחס V / Hz כך ש ערך תמיד נשאר בערך קבוע.
יישום המשוב על הלולאה הסגורה
ניתן לשנות את התרשים הראשון בדף זה לצורך תכנון ויסות V / Hz אוטומטי בלולאה סגורה כמוצג להלן:

באיור לעיל, הפוטנציאל בסיכה מספר 5 של IC2 קובע את רוחב ה- SPWM שנוצר בסיכה מספר 3 של אותו IC. ה- SPWM נוצר על ידי השוואת מדגם אדווה 12V ברשת בסיכה מס '5 עם גל משולש בסיכה מס' 7 של IC2, והדבר מוזרם למוספות הצד הנמוכות לצורך בקרת המנוע.
בתחילה SPWM זה מוגדר ברמה מותאמת כלשהי (באמצעות סיבוב 1K) המפעיל את שערי ה- IGBT הצדניים הנמוכים של הגשר התלת-פאזי להפעלת תנועת הרוטור ברמת המהירות הנומינלית שצוינה.
ברגע שרוטור הרוטור מתחיל להסתובב, הטכומטר המחובר עם מנגנון הרוטור גורם לכמות נוספת של מתח להתפתח בסיכה מספר 5 של IC2, זה גורם באופן יחסי להתרחבות ה- SPWM וגורם למתח רב יותר לסלילי הסטטור של המנוע. זה גורם לעלייה נוספת במהירות הרוטור וגורם למתח רב יותר בסיכה מספר 5 של IC2, וזה נמשך עד שהמתח המקביל ל- SPWM כבר אינו מסוגל לעלות וסינכרון הרוטור של הסטטור יגיע למצב יציב.
ההליך לעיל ממשיך להתאים את עצמו לאורך כל תקופות הפעולה של המנוע.
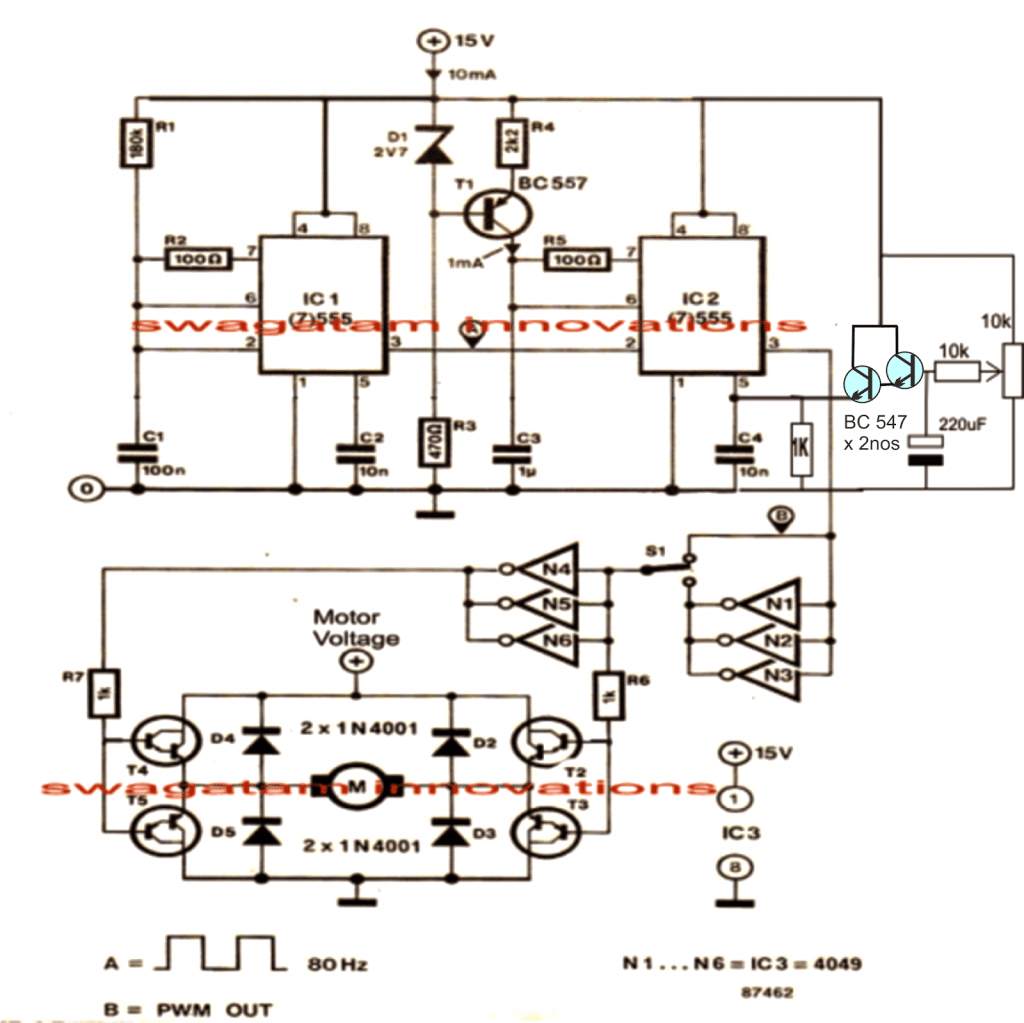
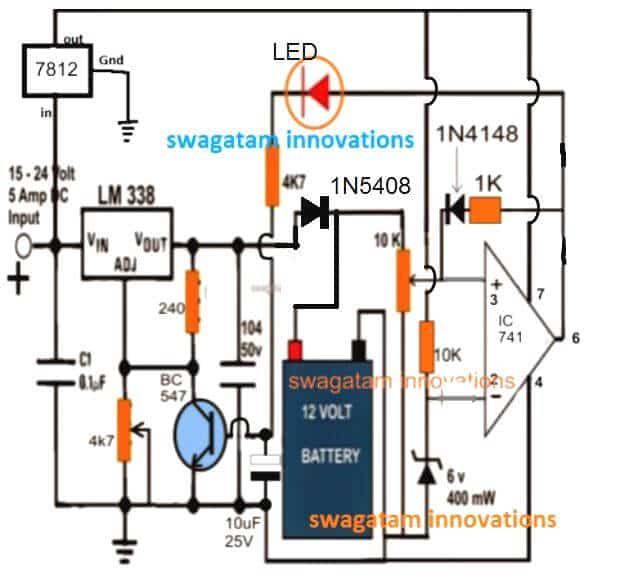
כיצד להכין ולשלב את הטכומטר
ניתן לראות תכנון פשוט של טכומטר בתרשים הבא, זה יכול להיות משולב עם מנגנון הרוטור כך שתדירות הסיבוב מסוגלת להזין את בסיס ה- BC547.

כאן נתוני מהירות הרוטור נאספים מחיישן אפקט הול או מרשת LED / חיישן IR ומועברים לבסיס T1.
T1 מתנדנד בתדר זה ומפעיל את מעגל הטכומטר שנעשה על ידי תצורה מתאימה של מעגל מונו יציב IC 555.
התפוקה מהטכומטר הנ'ל משתנה באופן יחסי בתגובה לתדר הקלט בבסיס T1.
כאשר התדר עולה המתח בצד ימין קיצוני יציאת D3 גם עולה ולהיפך, ועוזרת לשמור על יחס V / Hz לרמה קבועה יחסית.
כיצד לשלוט במהירות
ניתן להשיג את מהירות המנוע המשתמשת ב- V / F קבוע על ידי שינוי קלט התדר בכניסת השעון של IC 4035. ניתן להשיג זאת על ידי הזנת תדר משתנה ממעגל IC 555 astable או מכל מעגל סטאדי סטנדרטי לכניסת השעון של IC 4035.
שינוי התדר משנה למעשה את תדירות ההפעלה של המנוע מה שמוריד בהתאמה את מהירות ההחלקה.
זה מזוהה על ידי הטכומטר, והטכומטר מפחית באופן יחסי את הפוטנציאל בסיכה מס '5 של ה- IC2, שבתורו מפחית באופן יחסי את תכולת ה- SPWM במנוע, וכתוצאה מכך מתח המנוע מופחת, מה שמבטיח וריאציה של מהירות המנוע עם הנכון. יחס V / F נדרש.
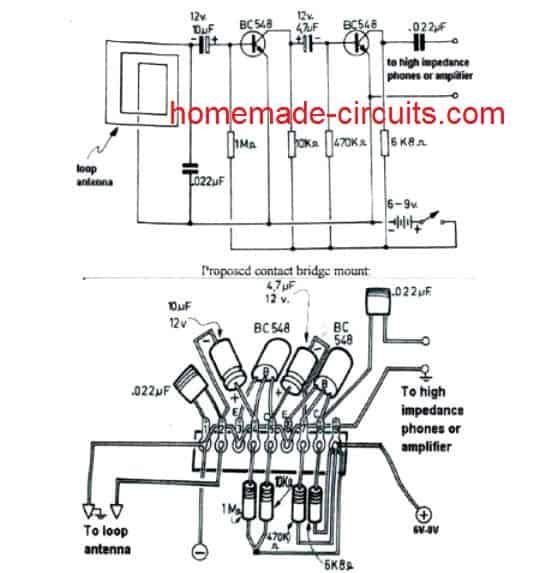
ממיר V ל- F תוצרת בית

במעגל ממיר המתח לעיל משמש IC 4060 והתנגדותו תלויה בתדר מושפעת באמצעות מכלול LED / LDR להמרות המיועדות.
מכלול ה- LED / LDR אטום בתוך תיבת הוכחה לאור, וה- LDR ממוקם על פני נגן תלוי תדר 1M של ה- IC.
מכיוון שתגובת LDR / LDR היא די ליניארית, התאורה המשתנה של נורית ה- LDR מייצרת תדר משתנה (גדל או יורד) באופן יחסי על פני סיכה 3 של ה- IC.
ניתן להגדיר את ה- FSD או את טווח ה- V / Hz של הבמה על ידי הגדרת הנגד 1M או אפילו את ערך C1 כראוי.
ה- LED הוא מתח נגזר ומואר דרך ה- PWM משלב מעגל ה- PWM הראשון. זה מרמז שככל ש- PWMs משתנים, תאורת ה- LED תשתנה גם היא, אשר בתורו תוליד תדר גדל או יורד באופן יחסי בסיכה 3 של IC 4060 בתרשים לעיל.
שילוב הממיר עם VFD
תדר משתנה זה מ- IC 4060 כעת פשוט צריך להיות משולב עם כניסת השעון של גנרטור IC CD4035.
השלבים שלעיל מהווים את המרכיבים העיקריים להכנת מעגל VFD תלת פאזי.
כעת, יהיה חשוב לדון בנוגע ל- DC BUS הנדרש לאספקת בקרי המנוע IGBT ולקביעת נהלי התכנון כולו.
ניתן להשיג את ה- DC BUS על פני פסי ה- IGBT H- גשר על ידי תיקון כניסת 3 הפאזות הזמינה באמצעות תצורת המעגל הבאה. מסילות ה- IGBT DC BUS מחוברות על פני הנקודות המצוינות כ'עומס '

עבור מקור שלב חד פעמי ניתן ליישם את התיקון באמצעות תצורת רשת גשר דיודות 4 רגילה.
כיצד להגדיר את מעגל ה- VFD התלת-שלבי המוצע
ניתן לעשות זאת בהתאם להוראות הבאות:
לאחר החלת מתח האוטובוס DC על גבי ה- IGBT (ללא מנוע מחובר) כוונן את הגדרת ה- PWM 1k המוגדרת מראש עד שהמתח על פני המסילות יהיה שווה למפרט מתח המנוע המיועד.
לאחר מכן התאם את ההגדרה הקבועה מראש של IC 4060 1M על מנת להתאים את כל אחת מכניסות ה- IRS2330 לרמת התדר הנכונה הנדרשת, בהתאם למפרט המנוע הנתון.
לאחר השלמת ההליכים הנ'ל, המנוע שצוין עשוי להיות מחובר ומסופק עם רמות מתח שונות, פרמטר V / Hz ואושר עבור פעולות V / Hz אוטומטיות על המנוע המחובר.
קודם: כיצד לבנות מעגל אור לגדול הבא: מעגל מרכך מים נחקר