במערכת חשמל, מנועים סינכרוניים הם מנועי AC 3-פאזיים במצב יציב הנפוצים ביותר, הממירים אנרגיה חשמלית לאנרגיה מכנית. מנוע מסוג זה פועל במהירות סינכרונית, שהיא קבועה והיא סינכרונית עם תדר האספקה ותקופת הסיבוב שווה למספר האינטגרלי. של מחזורי זרם חילופין. כלומר מהירות המנוע שווה לשדה המגנטי המסתובב. סוג מנוע זה משמש בעיקר ב מערכות חשמל כדי לשפר את גורם הכוח. ישנם מנועים סינכרוניים שאינם נרגשים ו- DC, הפועלים על פי הכוח המגנטי של המנוע. מנועי רתיעה, מנועי היסטרזיס ומנועי מגנטים קבועים הם המנועים הסינכרוניים שאינם נרגשים. מאמר זה עוסק בעבודה של מנוע סינכרוני מגנטי קבוע.
מהו מנוע סינכרוני מגנטי קבוע?
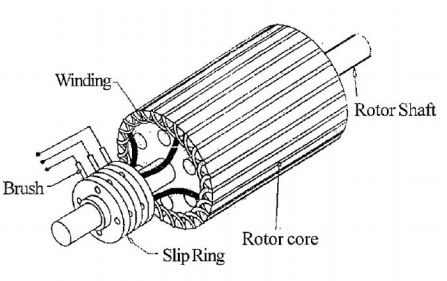
המנועים הסינכרוניים המגנטים הקבועים הם אחד מסוגי המנועים הסינכרוניים של AC, כאשר השדה מתרגש ממגנטים קבועים המייצרים EMF גב סינוסי. הוא מכיל רוטור וסטטור זהה לזה של מנוע אינדוקציה , אך מגנט קבוע משמש כרוטור ליצירת שדה מגנטי. לפיכך אין צורך לפצע שדה המתפתל הרוטור . זה ידוע גם כמנוע גל סינוס קבוע ללא מברשות תלת פאזי. ה דיאגרמת מנוע סינכרוני מגנט קבוע מוצג להלן.

מנוע סינכרוני מגנטי קבוע
תורת מנוע סינכרוני קבוע של מגנטים
המנועים הסינכרוניים המגנטים הקבועים יעילים מאוד, ללא מברשות, מהירים מאוד, בטוחים, ומעניקים ביצועים דינמיים גבוהים בהשוואה למנועים המקובלים. הוא מייצר מומנט חלק, רעש נמוך ומשמש בעיקר ליישומים מהירים כמו רובוטיקה . זהו מנוע סינכרוני AC תלת פאזי שפועל במהירות סינכרונית עם מקור ה- AC המיושם.
במקום להשתמש בפיתול לרוטור, מותקנים מגנטים קבועים ליצירת שדה מגנטי מסתובב. מכיוון שאין אספקת מקור DC, אלה סוגי מנועים הם פשוטים מאוד ופחות עלות. הוא מכיל סטטור שעליו מותקנים 3 פיתולים ורוטור עם מגנט קבוע המותקן ליצירת עמודי שדה. אספקת זרם הכניסה לשלושה שלבים ניתנת לסטטור כדי להתחיל לעבוד.
עקרון עבודה
ה עיקרון עבודה מנוע סינכרוני מגנט קבוע דומה למנוע הסינכרוני. זה תלוי בשדה המגנטי המסתובב שמייצר כוח אלקטרומוטיבי במהירות סינכרונית. כאשר סלילת הסטטור מונעת באמצעות מתן אספקה תלת פאזית, נוצר שדה מגנטי מסתובב בין פערי האוויר.
זה מייצר את המומנט כאשר מוטות שדה הרוטור מחזיקים את השדה המגנטי המסתובב במהירות סינכרונית והרוטור מסתובב ברציפות. מכיוון שמנועים אלה אינם מנועים המתניעים את עצמם, יש צורך לספק ספק כוח בתדרים משתנים.
משוואת EMF ומומנט
במכונה סינכרונית ממוצע ה- EMF המושרה לכל שלב נקרא דינמי גורם ל- EMF במנוע סינכרוני, השטף שנחתך על ידי כל מוליך לכל מהפכה הוא Pϕ Weber
ואז הזמן שנדרש להשלמת מהפכה אחת הוא 60 / N שניות
ניתן לחשב את EMF הממוצע המושרה למוליך באמצעות
(PϕN / 60) x Zph = (PϕN / 60) x 2Tph
איפה Tph = Zph / 2
לכן ממוצע ה- EMF לכל שלב הוא,
= 4 x ϕ x Tph x PN / 120 = 4ϕfTph
איפה Tph = לא. מהפניות המחוברות בסדרות לכל שלב
ϕ = שטף / מוט בוובר
P = לא. של מוטות
F = תדר בהרץ
Zph = לא. מוליכים המחוברים בסדרה לכל שלב. = Zph / 3
משוואת EMF תלויה בסלילים ובמוליכים שבסטטור. עבור מנוע זה, גורם התפלגות Kd וגורם המגרש Kp נחשבים גם הם.
לָכֵן, E = 4 x ϕ x f x Tph xKd x Kp
משוואת המומנט של מנוע סינכרוני מגנטי קבוע ניתנת כ,
T = (3 x Eph x Iph x sinβ) / ωm
בקרת מומנט ישירה של מנוע סינכרוני מגנטי קבוע
כדי לשלוט על המנוע הסינכרוני המגנטי הקבוע, אנו משתמשים בסוגים שונים של מערכות בקרה . בהתאם למשימה, נעשה שימוש בטכניקת השליטה הדרושה. שיטות השליטה השונות של מנוע סינכרוני מגנטי קבוע הן,
קטגוריה סינוסואידית
- סקלר
- וקטור: בקרת כיוון שדה (FOC) (עם ובלי חיישן מיקום)
- בקרת מומנט ישירה
קטגוריה טרפז
- לולאה פתוחה
- לולאה סגורה (עם ובלי חיישן מיקום)
טכנולוגיית בקרת מומנט ישירה של מנוע זה היא מעגל בקרה פשוט מאוד עם ביצועים דינמיים יעילים וטווח בקרה טוב. זה לא דורש שום חיישן מיקום עבור הרוטור. החיסרון העיקרי בשימוש בשיטת בקרה זו הוא בכך שהוא מייצר מומנט גבוה ואדווה זרם.
בְּנִיָה
ה בניית מנוע סינכרוני קבוע למגנטים דומה למנוע הסינכרוני הבסיסי, אך ההבדל היחיד הוא ברוטור. ברוטור אין שום שדה מתפתל, אך המגנטים הקבועים משמשים ליצירת עמודי שדה. המגנטים הקבועים המשמשים ב- PMSM מורכבים מסומריום-קובלט ומדיום, ברזל ובורון בגלל החדירות הגבוהה שלהם.
המגנט הקבוע הנפוץ ביותר הוא ניאודימיום-בורון-ברזל בגלל עלותו היעילה וזמינותו. בסוג זה, המגנטים הקבועים מותקנים על הרוטור. בהתבסס על הרכבה של המגנט הקבוע על הרוטור, בנייתו של מנוע סינכרוני מגנטי קבוע מחולקת לשני סוגים. הם,
PMSM צמוד על פני השטח
בבנייה זו, המגנט מותקן על פני הרוטור. הוא מתאים ליישומים מהירים, מכיוון שהוא אינו חזק. הוא מספק פער אוויר אחיד מכיוון שחדירות המגנט הקבוע ופער האוויר זהה. אין מומנט רתיעה, ביצועים דינמיים גבוהים ומתאים למכשירים מהירים כמו רובוטיקה וכונני כלים.

משטח רכוב
קבור PMSM או PMSM פנימי
בסוג זה של בנייה, המגנט הקבוע מוטבע ברוטור כפי שמוצג באיור למטה. זה מתאים ליישומים מהירים ומקבל עמידות. מומנט הרתיעה נובע מהבולטות של המנוע.

קבור PMSM
עבודה של מנוע סינכרוני מגנטי קבוע
העבודה של המנוע הסינכרוני המגנטי הקבוע היא פשוטה מאוד, מהירה ויעילה בהשוואה למנועים קונבנציונליים. העבודה של PMSM תלויה בשדה המגנטי המסתובב של הסטטור ובשדה המגנטי הקבוע של הרוטור. המגנטים הקבועים משמשים כרוטור ליצירת שטף מגנטי קבוע, פועלים וננעלים במהירות סינכרונית. מנועים מסוג זה דומים למנועי DC ללא מברשות.
קבוצות הפאזורים נוצרות על ידי חיבור פיתולי הסטטור זה עם זה. קבוצות פאזור אלה מחוברות יחד ליצירת קשרים שונים כמו כוכב, דלתא, כפול ושלב יחיד. כדי להפחית את המתחים ההרמוניים, יש לפתל את הפיתולים תוך זמן קצר.
כאשר אספקת AC 3-פאזית ניתנת לסטטור, היא יוצרת שדה מגנטי מסתובב והשדה המגנטי הקבוע נגרם עקב המגנט הקבוע של הרוטור. רוטור זה פועל בסנכרון עם המהירות הסינכרונית. כל פעולתו של ה- PMSM תלויה בפער האוויר בין הסטטור לרוטור ללא עומס.
אם פער האוויר גדול, יופחתו הפסדי הרוח של המנוע. עמודי השדה שנוצרו על ידי המגנט הקבוע בולטים. המנועים הסינכרוניים המגנטים הקבועים אינם מנועים המתניעים את עצמם. לכן, יש צורך לשלוט על התדר המשתנה של הסטטור באופן אלקטרוני.
מנוע סינכרוני קבוע למגנט לעומת BLDC
ההבדלים בין מנוע סינכרוני קבוע למגנטים (PMSM) ו- BLDC ( מנועי DC ללא מברשות ) כלול את הבאים.
| מנוע סינכרוני מגנטי קבוע | BLDC |
| מדובר במנועי סינכרון AC ללא מברשות | אלה מנועי DC ללא מברשות |
| אדוות מומנט נעדרות | אדוות מומנט קיימות |
| יעילות הביצועים גבוהה | יעילות הביצועים נמוכה |
| יותר יעיל | פחות יעיל |
| משמש ביישומים תעשייתיים, מכוניות, מנועי סרוו, רובוטיקה, כונני רכבת וכו ' | משמש במערכות כוח היגוי אלקטרוניות, מערכות HVAC, כונני רכבת היברידיים (חשמל) וכו ' |
| מייצר רעש נמוך | מייצר רעש גבוה. |
יתרונות
ה היתרונות של מנוע סינכרוני מגנטי קבוע לִכלוֹל,
- מספק יעילות גבוהה יותר במהירויות גבוהות
- זמין במידות קטנות בחבילות שונות
- תחזוקה והתקנה קל מאוד ממנוע אינדוקציה
- מסוגל לשמור על מומנט מלא במהירות נמוכה.
- יעילות ואמינות גבוהה
- נותן מומנט חלק וביצועים דינמיים
חסרונות
החסרונות של מנועים סינכרוניים קבועים של מגנטים הם,
- מנועים מסוג זה יקרים מאוד בהשוואה למנועי אינדוקציה
- איכשהו קשה להתניע כי הם לא מנועים שמתניעים את עצמם.
יישומים
יישומי המנועים הסינכרוניים המגנטים הקבועים הם,
- מזגנים
- מקררים
- מדחסי AC
- מכונות כביסה, שהן מונעות ישירות
- הגה כוח חשמלי לרכב
- כלי מכונה
- מערכות הספק גדולות לשיפור גורם הכוח המוביל והפיגור
- שליטה בגרירה
- יחידות אחסון נתונים.
- כונני סרוו
- יישומים תעשייתיים כמו רובוטיקה, תעופה וחלל ועוד.
לפיכך, זה הכל בערך סקירה כללית של המנוע הסינכרוני המגנטי הקבוע - הגדרה, עבודה, עקרון עבודה, תרשים, בנייה, יתרונות, חסרונות, יישומים, משוואת EMF ומשוואה. הנה שאלה עבורך, 'מה המטרה של שימוש במגנט קבוע במנועים סינכרוניים?