
בדרך כלל, רובוטים לשלט רחוק משתמשים במעגלי RF, שיש להם חסרונות של טווח עבודה מוגבל, שליטה מוגבלת וטווח תדרים מוגבל. כדי להתגבר על החסרונות האלה, לנייד רובר המופעל באמצעות טלפון סלולרי נעשה שימוש ברכב רובוטי. הוא מספק את היתרונות של שליטה רובוטית, בקרים ללא פריצה ועד שתים עשרה מערכות שליטה וכו '.
למרות היכולות והמראה של רובוטיקה משובצת משתנים מאוד, כל הרובוטים חולקים את התכונות של מבנה נייד, מכני תחת שליטה כלשהי. השליטה ברובוטים כוללת שלושה שלבים שונים שהם תפיסה, עיבוד ופעולה. בדרך כלל, החיישנים מותקנים על הרובוט. התפיסה והעיבוד נעשים על ידי המיקרו-בקר על הלוח, והפעולה מתבצעת באמצעות מנועים.
רכב רובוט רובוטים המופעל באמצעות טלפון סלולרי

רכב רובוט רובוטים המופעל באמצעות טלפון סלולרי על ידי Edgefxkits.com
הכוונה העיקרית של פרויקט זה היא לשלוט בזרוע רובוטית המותקנת על רכב רובוטי באמצעות טלפון נייד. הוא מספק טווח עבודה גדול ושליטה חזקה וכו '.
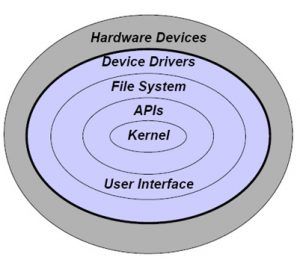
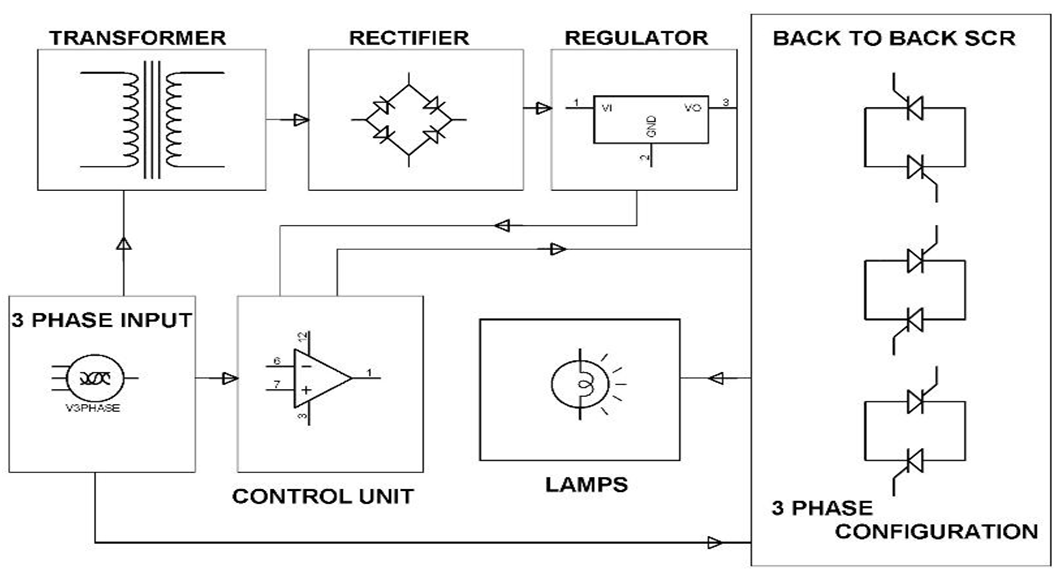
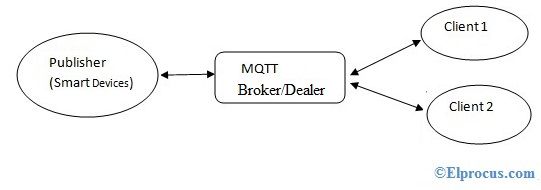
דיאגרמת חסימות של רכב רובוטים המופעלים באמצעות טלפון סלולרי:

דיאגרמת חסימה של לנדרובר המופעלת בטלפון הסלולרי
אבני הבניין העיקריות הן מיקרו-בקר, טלפון סלולרי, מפענח DTMF ומעגל נהג מנוע DC. הטלפון הסלולרי הוא החלק החשוב ביותר במערכת כולה מכיוון שהמערכת כולה עובדת ומופעלת על ידי הטלפון הסלולרי. DTMF (תדר רב טון כפול) מקבל את אות הכניסה מהטלפון הסלולרי ומפענח אותו ואז מייצר פלט דיגיטלי של 4 סיביות של ה- מיקרו-בקר 8051 . כאשר מפענח DTMF נותן פלט דיגיטלי, הוא גם מייצר הפרעה בכל פעם.
המיקרו-בקר הוא לב המערכת כולה כאשר הוא מבצע את כל פעולות השליטה. המיקרו-בקר תלוי בקוד שנוצר על ידי מפענח DTMF בכדי להזיז את הרובר ימינה או שמאלה וקדימה או אחורה על ידי סיבוב שני מנועי DC. נהג המנוע DC מקבל אותות הפעלה מהמיקרו-בקר במונחים של לוגיקה נמוכה או גבוהה, ואז הוא מגביר ומסובב שני מנועים לשני הכיוונים.
השליטה ברובוט כוללת בעיקר ארבעה שלבים שונים: תפיסה, עיבוד פעולה וגילוי. בשלב התפיסה אם הטלפון הסלולרי המחובר לרובוט מקבל שיחה, אז פעולת הלחיצה על המקש בטלפון הסלולרי מפענחת את צליל ה- DTMF שנוצר. לאחר מכן, שבב המפענח מקבל את אות השמע מהטלפון הסלולרי, ואז ממיר את צליל ה- DTMF לקוד בינארי, שמועבר לאחר מכן למיקרו-בקר. בפרויקט זה, MT88710 IC משמש כמפענח DTMF. בשלב העיבוד, המיקרו-בקר מעבד את הקוד הבינארי שמתקבל ממפענח DTMF. ה מיקרו-בקר מתוכנת מראש ב- 'C' לבצע משימה מסוימת זו על פי סיביות הקלט.
בשלב הפעולה, סיבוב המנועים תלוי בכניסה שמספק המיקרו-בקר. שני מנועי DC כל אחד של 30 סל'ד משמשים לננדרובר ומונעים על ידי IC הנהג המנוע. בזיהוי הבמה, ולגילוי מכשולים, משדר ומקלט אינפרא אדום משמשים יחד עם הבאזר. כאשר המכשול מגיע מול הרובוט, משדר ה- IR מעביר את קרני ה- IR על האובייקט, ואז האובייקט משקף את קרני ה- IR למקלט ה- IR. מקלט ה- IR ואז מקבל את קרני ה- IR להפעלת הבאזר.
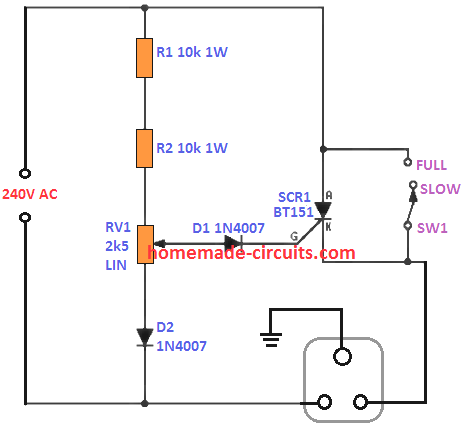
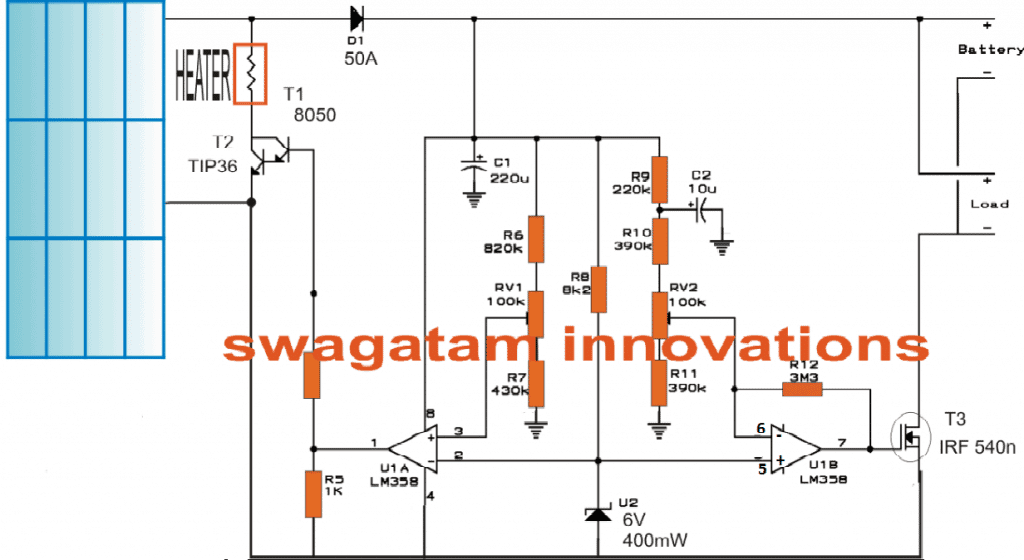
דיאגרמת מעגלים של רכב רובוטים המופעל באמצעות טלפון סלולרי:
המרכיבים העיקריים של הנדרובר הרובוטי המופעל באמצעות הטלפון הסלולרי הם מיקרו-בקר, נהג מנוע ומפענח DTMF. בפרויקט זה נעשה שימוש במפענח DTMF מסדרת MT8870 שמשתמש בטכניקות ספירה דיגיטליות לאיתור 16 זוגות הטונים של DTMF לפלט קוד של 4 סיביות. מעגל הדיטטון המובנה מבטל סינון מקדים. אם ניתן אות קלט ב- pin2, תצורת הקלט מוכרת כיעילה. אות הפענוח של 4 סיביות של צליל DTMF מועבר לסיכה 11 דרך פלט הסיכה 14. פינים אלה מחוברים לסיכות המיקרו-בקר Pao, Pa1, Pa2 ו- Pa3. הפלט של המיקרו-בקר מפסי היציאה PD0 דרך PD3 ו- PD7 מוזרמים לכניסות IN1, IN4 ומאפשרים לסיכות EN1, EN2 של נהג המנוע L293D IC ל תניע את שני מנועי DC .

תרשים מעגלים של לנדרובר המופעל בטלפון הסלולרי
במעגל זה, מתג S1 משמש לאיפוס ידני. הפלט של המיקרו-בקר אינו מספיק בכדי להניע את מנועי ה- DC, ולכן נהגים נוכחיים נחוצים לסיבוב המנוע. נהג המנוע L293D נועד לספק זרמי כונן דו כיווניים של עד 600 מיליאמפר במתח מ- 4.5V ל- 36V קל יותר לנהוג במנועי DC. נהג המנוע L293D מורכב מארבעה נהגים. הפינים IN1 עד IN4 & OUT1 ו- OUT4 הם סיכות הכניסה והפלט של מנהל ההתקן 1 עד מנהל התקן 4. הנהגים 1,2,3 ו- 4 מופעלים באמצעות סיכת הפעלה 1 (EN1) וסיכה 9 (EN2). כאשר קלט הפעלה EN1 (pin1) גבוה, הנהגים 1 ו- 2 מופעלים. באופן דומה, קלט הפעלה EN2 (pin9) מאפשר לנהגים 3.
יתרונות וחסרונות:
היתרונות של לנדרובר רובוטי המופעל באמצעות הטלפונים הסלולריים כוללים מערכת בקרה וניטור שליטה אלחוטית, ניווט לרכב מבוסס טכנולוגיית 3G וטווח תפעולי בלתי מוגבל על בסיס רשת הסלולר. החיסרון כולל: העלות בגין חיוב הטלפון הסלולרי גבוהה סוללות ניידות מתפרקות : בעיית הפריקה הקשורה לסוללות, שכן טעינת אובדן הסוללות נובעת מהפריקה מהירה מכיוון שהעומס הוא יכולת הסתגלות גבוהה: המערכת אינה ניתנת להתאמה לכל הטלפונים הסלולריים, אך ניתן להשתמש רק באלה עם האוזנייה המחוברת.
לפיכך, פרויקט רובוט זה המופעל באמצעות טלפון סלולרי מועיל מאוד ביישומים צבאיים לשליטה בכלי רכב צבאיים באמצעות טלפון נייד. בעתיד נוכל לזהות את עמדת האויבים על ידי סידור א מצלמה אלחוטית לרכב הרובוטי של לנדרובר. פרויקט זה יכול להועיל גם באקדמאים שכן סטודנטים יכולים ללמוד מינוחים ועקרונות שונים המוצעים בפרויקט זה. פרויקט זה יעזור לתלמידים להוסיף מחשבות ורעיונות חדשניים שלהם לפתח פרויקטים של רובוטיקה .
נקודות זיכוי:
- לנדרובר המופעל באמצעות טלפון סלולרי על ידי santoshbanisetty
- תרשים מעגלים של לנדרובר המופעל בטלפון הסלולרי מאת מהנדס מוסך





{kind=link}