
מבוא למערכות משובצות
המערכת שבה מטרת ייעוד תוכנה מוטמעת בתכנון חומרה מכונה מערכת משובצת. מערכת זו עשויה להיות מערכת עצמאית או מערכת גדולה יותר. התוכנה בדרך כלל נכנסת לתוכנה מודולי זיכרון כ- ROM, והוא אינו זקוק לשום זיכרון משני כמו במחשב. טלקום, כרטיסים חכמים, טילים, רשת מחשבים, אלקטרוניקה דיגיטלית לצרכן ולוויינים הם חלק מיישומי המערכות המשובצות.

יישומי מערכות משובצות
יישומי מערכות משובצות כוללים רובוטיקה, מצלמה דיגיטלית, צעצועים רב-משימתיים, מערכות בישול וכביסה, מערכות ביו-רפואיות, בקרי לוח מקשים, טלפונים ניידים וחכמים, מערכות מחשוב, מערכת תצוגה משקל חכמה אלקטרונית ומערכות בידור, כגון סרטונים, משחקים, מערכת מוסיקה משחקי וידאו וכן הלאה.
תהליך תכנון מערכת משובץ ניתן לעשות זאת על ידי סימולציה ראשונה, המשמשת לבדיקת המעגל מכיוון שהחלפת חומרה הופכת לקשה מאוד אם המעגל אינו תקין. אם התוצאות מותאמות לתוצאות הרצויות, התהליך יתוכנן לצמיתות על ידי תהליכי רקיק רצף.
יסודות מערכות משובצות
מערכות משובצות מיועדות לביצוע משימות ספציפיות, אך אינן יכולות לשמש כמחשבים למטרות כלליות לביצוע משימות שונות. התוכנה למערכת משובצת מכונה בדרך כלל קושחה, אשר ניתן לאחסן בדיסק או בשבב יחיד. שני האלמנטים העיקריים של המערכות הם:
- חומרת מערכת משובצת
- תוכנת מערכת משובצת

מערכת חומרה ותוכנה משובצות
חומרת מערכת משובצת : מערכת משובצת דורשת פלטפורמת חומרה כדי לקיים אינטראקציה עם כניסות ופלטים או משתנים שונים בזמן אמת. החומרה כוללת בקר כמו מיקרו-בקר או מעבד , מודולי זיכרון, ממשקי קלט / פלט, מערכות תצוגה ומודולי תקשורת וכו '.
תוכנת מערכת משובצת : תוכנה זו מאפשרת תכנות בצורה רצויה כך שתשלוט על פעולות שונות. זה כתוב בפורמט ברמה גבוהה, נערך לקוד ואז נזרק לבקרי חומרה.
מערכות משובצות בזמן אמת הן מערכות מחשב המבצעות את הפעולות, כמו ניטור, תגובה ושליטה בתנועה חיצונית. הסביבה החיצונית מחוברת למערכת המחשב באמצעות חיישנים , מפעילים וממשקי קלט / פלט. מערכת מחשוב אמיתית המוטמעת במערכת מחשב מכונה מערכת מוטמעת בזמן אמת. מערכת משובצת בזמן אמת משמשת בתחומים שונים כגון צבא, מגזר ממשלתי וברפואה.
פרויקטים רובוטיים בזמן אמת במערכות משובצות
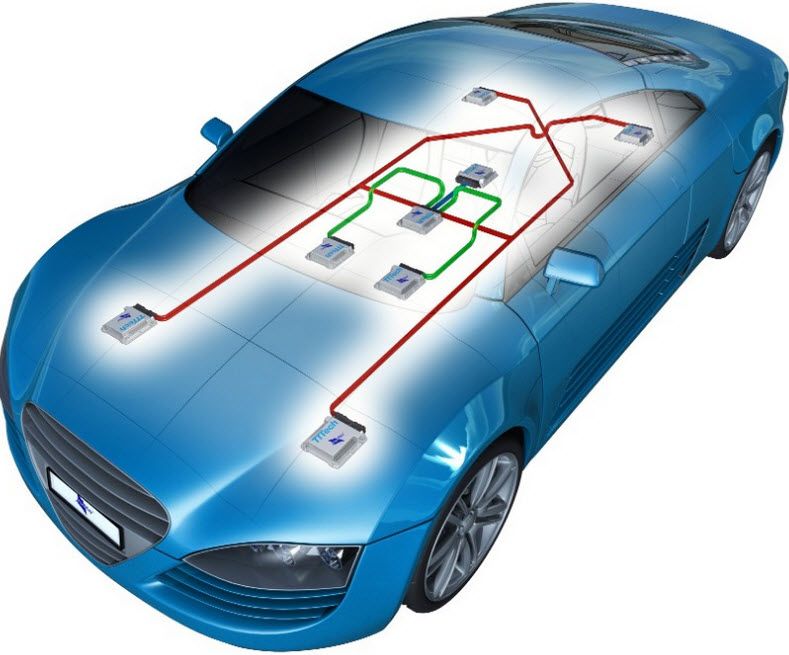
מערכות מוטמעות ניתן להשתמש בהרבה מיישומים בזמן אמת, כגון מכוניות, רובוטיקה, תעשיות וכו '. להלן פרויקטים בזמן אמת קשורים לטכנולוגיית הרובוטיקה .
1. רכב רובוטי נשלט באמצעות קול עם זיהוי דיבור למרחקים ארוכים
מטרת הפרויקט היא לשלוט ברכב רובוטי באמצעות פקודות קוליות להפעלה מרחוק. An מיקרו-בקר 8051 משמש עם מודול זיהוי דיבור לביצוע הפעולה הרצויה. היא משתמשת בבקר מיקרו 8051, מודול זיהוי דיבור, כפתור לחיצה, מודול RF, מקודד, מפענח, IC של מנוע מנוע, מנועי DC, סוללות ורכיבים שונים אחרים.

משדר רכב רובוטי נשלט באמצעות קול
ניתן לבצע תנועות רכב כמו שמאלה, ימינה, למעלה ולמטה באמצעות כפתורי לחיצה או פקודות קוליות על ידי מודול זיהוי דיבור שמממשק למיקרו-בקר. כאן, מקודד משמש לקידוד הפקודות הניתנות למיקרו-בקר באמצעות משדר ה- RF להעברת האותות בתדר של 433 מגהרץ.
לכן, כאשר אותות המופיעים בלחיצת כפתורים, או אותות הפקודה הקולית המתאימים לתנועה מתקבלים על ידי המיקרו, הוא שולח אותות בקרה למעגל המקבל דרך מודול המשדר.

מקלט רכב רובוטי נשלט באמצעות קול
עם קבלת האותות הללו, מקלט RF מעביר את האותות האלה למעגל מפענח שבו הנתונים הבינאריים מומרים לאות ברמת מיקרו-בקר. לכן, המיקרו-בקר מבצע את התנועה הרצויה ממעגל המשדר. מודול לייזר הוא התממשק עם המיקרו-בקר לאיתור הפעולות שביצע הרובוט גם במקומות חשוכים.
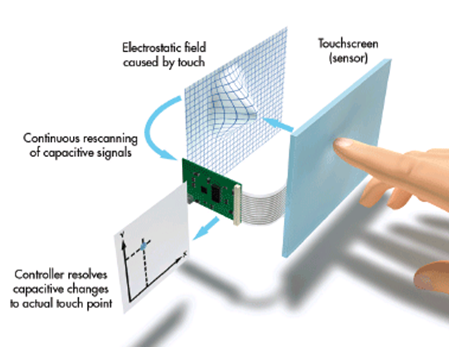
2. רכב רובוטי נשלט מרחוק מבוסס מסך מגע לניהול חנויות
פרויקט זה כולל שליטה ברכב רובוטי באמצעות תצוגת מסך מגע יחידה להפעלה מרחוק. לוח מסך מגע ממוקם בקצה המשדר, ו- לבחור רובוט ממוקמת בקצה המקלט לביצוע משימה על ידי תגובה לאותות. רכיבי החומרה המשמשים בפרויקט זה כוללים מיקרו-בקר 8051, לוח מסך מגע, אנטנות (צד משדר-מקלט), מקודד, מפענח, מנועי DC, גוף רובוטי, סוללה וכו '.

משדר רכב רובוטי מבוסס מסך מגע
כפי שנדון במודול זיהוי הדיבור של הפרויקט הנ'ל, בפרויקט זה גם מודול מסך מגע שולח את אותות הבקרה המתאימים לתנועת הרכב אל המיקרו-בקר. הבקר שולח לאחר מכן את האותות למקודד, ואז למשדר שבסופו של דבר מעביר את האותות למעגל המקלט.

מקלט רכב רובוטי מבוסס מסך מגע
האנטנה המוצבת בקצה המקלט מקבלת את אותות ה- RF מהאנטנה המשדרת ומפענחת את הנתונים ואז שולחת את הנתונים למיקרו-בקר. מערך זה כולל ארבעה מנועים שהתממשקו למיקרו-בקר: שני מנועים לתנועת הזרוע והאוחזת והשניים האחרים לתנועת הגוף. כל המנועים הללו מונעים על ידי מנוע נהג IC המקבל ברציפות את הפקודות מהמיקרו-בקר.
אלה השניים יישומי מערכות משובצות בתחום הרובוטיקה. הדוגמאות בזמן אמת של מערכות משובצות עשויות לספק לך הבנה טובה יותר של מושג המערכות המשובצות. אם יש לך ספקות נוספים ביישום פרויקטים אלה, תוכל ליצור איתנו קשר על ידי תגובה להלן.
נקודות זיכוי
- יישומי מערכות משובצות אווייטים
- מערכת חומרה ותוכנה משובצות dca-design



![בעיית תפס IC 4060 [נפתרה]](https://electronics.jf-parede.pt/img/timer-delay-relay/35/ic-4060-latching-problem.jpg)
{kind=link}