הפוסט דן במושל מהירות מנוע אלקטרוני או במעגל בקר המשתמש בלולאת אות משוב סל'ד דרך רשת חיישני אפקט הול. הרעיון התבקש על ידי מר אימזה נגה.
יעדי מעגל ודרישות
- תודה רבה על זמנך. אני מאמין שהמעגל הזה יתאים לאספקה חד פאזית. האלטרנטור שלי הוא 7KvA תלת פאזי ואני רוצה לחבר אותו למנוע רכב דיזל עם מאיץ במקום מושל מהירות.
- מה שהייתי רוצה ליישם הוא - 'GOVERNOR ENGINE SPEED GO', שכנראה יהיה לו מנגנון אלקטרוני מבוקר סרוו כגון - מעגל חיישן מהירות (חיישן RPM) להנעת מנוע סרוו להפעלת מנגנון ההאצה על מנת לשמור מהירות קבועה של המנוע ביחס לעומס המופעל על האלטרנטור.
- זה יעזור בשמירה על התדר כמו גם על המתח של הגנרטור. הייתי מסוגל לטפל בהיבט המכני, אם אתה מתכנן בחביבות מעגל לשליטה במנוע הסרוו בצורה כזו שניתן יהיה להפנות אותו לשני הכיוונים ביחס לשינוי סל'ד המנוע. תודה רבה בציפייה.
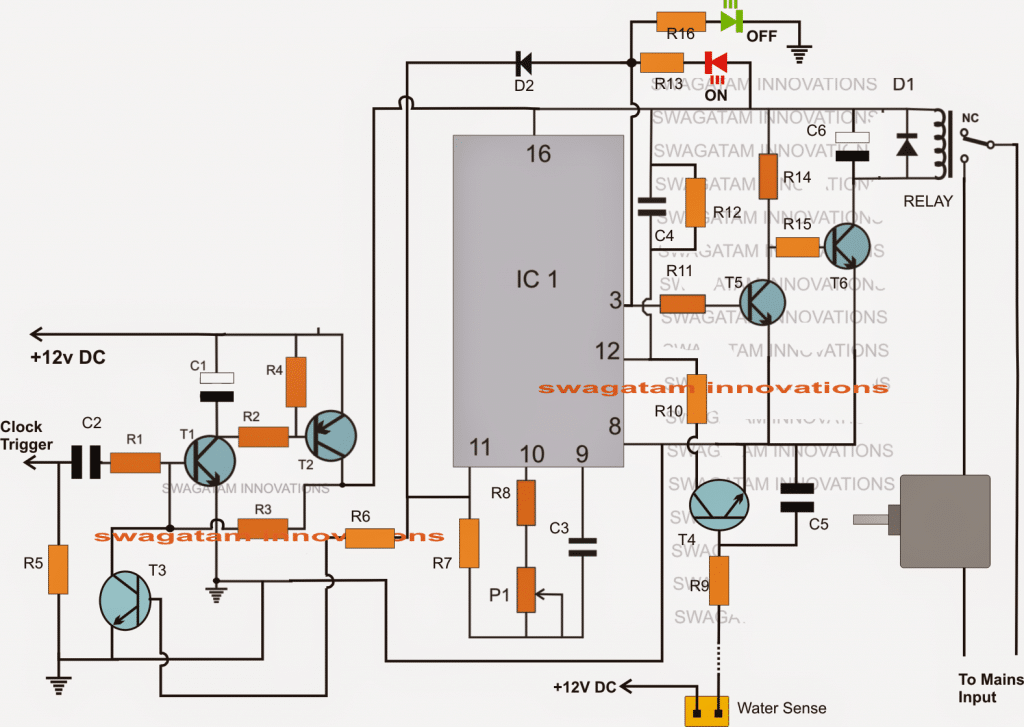
תרשים מעגלים

הערה: ניתן להחליף את המנוע בעזרת סולנואיד טעון באביב 12 וולט
העיצוב
המעגל של מושל מהירות מנוע דיזל או בקר ניתן לראות באיור לעיל באמצעות מעבד סל'ד משוב או א מעגל טכומטר
שלב IC1 555 בצד שמאל יוצר מעגל טכומטר פשוט אשר מוגדר עם חיישן אפקט הול מחובר עם גלגל העומס של המנוע לחישת קצב הסל'ד שלו.
הסל'ד מומר לקצב דופק או תדר משתנה באופן יחסי ומופעל בבסיס של BJT לצורך החלפת הסיכה מספר 2 של ה- IC1.
מבצע מעגל
IC1 בעצם מותקן במצב מונו-יציב שגורם לפלט שלו ליצור מיתוג הפעלה / כיבוי כוונון פרופורציונלי, שתקופתו מוגדרת באמצעות סיר 1M המוצג.
הפלט מ- IC1 הנושא את תוכן הסל'ד בצורה של פולסים מתוזמנים מורחבים מוחלק כראוי על ידי שלב אינטגרטור המורכב מכמה רכיבי RC המשתמשים בנגד 1K, 10K ו- 22uF. קבלים 2.2uF.
שלב זה ממיר את נתוני הסל'ד הגסים של מונוסטבל למתח משתנה בצורה חלקה או משתנה באופן אקספוננציאלי.
ניתן לראות מתח משתנה אקספוננציאלי זה המחובר לסיכה מס '5 בשלב IC2 555 הבא שהוגדר כמעגל אסטטי.
תפקידו של יציב זה הוא לייצר תפוקת PWM צרה או נמוכה מאוד בסיכה 3 שלה בתנאי ההפעלה הרגילים שלה.
כאן מצב הפעלה רגיל מתייחס למצב שבו הסל'ד החישתי נמצא בגבול שצוין וסיכה מס '5 של IC2 אינה מקבלת קלט מתח מהעוקב הפולט. ניתן ליישם את פלט ה- PWM הנמוך הזה על ידי התאמה מתאימה של שני הנגדים 100k וקבל 1uF המשויך לסיכה IC2 # 6/2 ולסיכה 7.
PWM נמוך זה מסיכה 3 של IC2 אינו מסוגל להחליף את TIP122 מספיק חזק ולכן מכלול גלגל המנוע המצוין אינו מסוגל להשיג את המומנטום הנדרש ולכן נשאר מנוטרל.
עם זאת, כאשר הסל'ד מתחיל לעלות, הטכומטר מתחיל לייצר מתח גבוה באופן אקספוננציאלי אשר בתורו גורם למתח גובר באופן יחסי בסיכה מספר 5 של IC2.
זה מאפשר לאחר מכן ל TIP122 להתנהל חזק יותר, ולמנוע המחובר להשיג מומנט מספיק, כך שהוא מתחיל ללחוץ על דוושת התאוצה המצורפת לעבר מצב האטה.
הליך זה מכריח את מנוע הדיזל להפחית את מהירותו, מה שגורם בהתאמה למדוד הטכומטר ולשלבי ה- PWM להחזיר את מצבו המקורי, ולאכוף את המהירות המבוקרת הנדרשת עבור מנוע הדיזל.
במקום הסידור המונע של המאיץ המוצג, ניתן לחבר את אספן TIP122 לחלופין עם ה- יחידת CDI של מנוע הדיזל להפחתת מהירות זהה, להקלת מצב מוצק ויישום אמין יותר של בקרת מהירות המנוע האלקטרונית הנדונה או מעגל מושל מהירות המנוע האלקטרוני.
איך להציב
בתחילה יש לשמור על IC1, IC2 שלבים מנותקים על ידי הסרת קישור עוקב הפולט עם סיכה מספר 5 של IC2.
בשלב הבא וודא ששני הנגדים 100k משתנים כראוי ומותאמים כך שסיכה מס '3 של IC2 תיצור PWMs הכי צרים שאפשר (@ כ -5% זמן זמן ON).
לאחר מכן, באמצעות א ספק כוח מתכוונן 0 עד 12 וולט , הפעל מתח משתנה בסיכה מס '5 של IC2 ואשר PWM בעלייה באופן יחסי בסיכה מס' 3.
לאחר בדיקת החלק האסטסטי, יש לבדוק את הטכומטר על ידי הפעלת פעימות סל'ד ידועות המתאימות לסל'ד הרצוי. במהלך ההתאמה מוגדר בסיס ה- BJT של עוקב הפולט כך שהפולט שלו מסוגל לייצר לפחות 10 וולט או רמה מספיק בכדי לגרום ל- IC2 PWM לייצר את המומנט הנדרש על מנוע בקרת הדוושה המחובר.
לאחר עוד שיפוצים והתנסויות תוכלו לצפות להשיג את בקרת המהירות האוטומטית הנדרשת עבור המנוע והעומס המחובר אליו.
עדכון
אם המנוע מוחלף בסולנואיד טעון קפיץ, ניתן לפשט את העיצוב הנ'ל כמפורט להלן:

ניתן לשלב את פיר הסולנואיד עם דוושת ההאצה לצורך ביצוע ויסות מהירות המנוע האוטומטי המיועד.
לקבלת אפשרויות נוספות לגבי ממיר תדרים למתח, ניתן לעיין ב המאמר הזה .
קודם: מעגל יישומי כושר כושר מבוקר טיימר הבא: טעינת סוללה עם מעגל מחצלת פייזו