בפרויקט זה אנו הולכים להוריד 12 וולט DC לכל ערך DC שבין 2 ל 11 וולט. המעגל המוריד את מתח ה- DC נקרא ממיר באק. מתח היציאה או המתח הדרוש נשלטים באמצעות פוטנציומטר המחובר לארדואינו.
מאת אנקיט נגי
מבוא לממירים:
ישנם בעצם שני סוגים של ממירים:
1. ממיר באק
2. ממיר Boost
שני הממירים משנים את מתח הכניסה בהתאם לדרישה. הם דומים לא שַׁנַאי עם הבדל עיקרי אחד. בעוד שנאי עולה / יורד מתח AC, ממירי DC עולים / יורדים מתח DC. המרכיבים העיקריים של שני הממירים הם:
א. מוספט
ב.מדריך
ג קבלים
ממיר BUCK: כפי שהשם עצמו מציע, באק פירושו להוריד את מתח הכניסה. ממיר באק נותן לנו את המתח הנמוך ממתח הכניסה DC עם קיבולת זרם גבוהה. זו המרה ישירה.
ממיר BOOST: כפי שמציע השם עצמו, דחיפה פירושה להגדיל את מתח הכניסה.
ממיר Boost נותן לנו את מתח ה- DC יותר ממתח ה- DC בכניסה. זו גם המרה ישירה.
** בפרויקט זה אנו הולכים ליצור מעגל ממיר באק בכדי להוריד 12 וולט DC באמצעות ארדואינו כמקור PWM.
שינוי תדירות PWM בסיכות ארדואינו:
סיכות PWM של ארדואינו UNO הן 3, 5, 6, 9, 10 ו -11.
לביצוע PWM, הפקודה המשמשת היא:
analogWrite (PWM PIN NO, PWM VALUE)
ותדר ה- PWM עבור פינים אלה הוא:
לסיכות Arduino 9, 10, 11 ו- 3 ---- 500Hz
לסיכות Arduino 5 ו -6 ---- 1kHz
תדרים אלה הם בסדר לשימוש כללי כמו דהיית נורית. אבל בשביל מעגל ממיר באק או בוסט , יש צורך במקור PWM בתדירות גבוהה (בטווח של עשרות KHZ) מכיוון ש- MOSFET זקוק לתדר גבוה למיתוג מושלם וגם קלט בתדר גבוה מקטין את הערך או הגודל של רכיבי המעגל כמו משרן וקבל. לכן עבור פרויקט זה אנו זקוקים למקור PWM בתדירות גבוהה.
הדבר הטוב הוא שנוכל לשנות את תדר ה- PWM של סיכות PWM של ארדואינו באמצעות קוד פשוט:
לארדונו אונו:
תדר PWM זמין עבור D3 & D11:
// TCCR2B = TCCR2B & B11111000 | B00000001 // לתדר PWM של 31372.55 הרץ
// TCCR2B = TCCR2B & B11111000 | B00000010 // לתדר PWM של 3921.16 הרץ
// TCCR2B = TCCR2B & B11111000 | B00000011 // לתדר PWM של 980.39 הרץ
TCCR2B = TCCR2B & B11111000 | B00000100 // לתדר PWM של 490.20 הרץ (DEFAULT)
// TCCR2B = TCCR2B & B11111000 | B00000101 // לתדר PWM של 245.10 הרץ
// TCCR2B = TCCR2B & B11111000 | B00000110 // לתדר PWM של 122.55 הרץ
// TCCR2B = TCCR2B & B11111000 | B00000111 // לתדר PWM של 30.64 הרץ
תדר PWM זמין עבור D5 & D6:
// TCCR0B = TCCR0B & B11111000 | B00000001 // לתדר PWM של 62500.00 הרץ
// TCCR0B = TCCR0B & B11111000 | B00000010 // לתדר PWM של 7812.50 הרץ
TCCR0B = TCCR0B & B11111000 | B00000011 // לתדר PWM של 976.56 הרץ (DEFAULT)
// TCCR0B = TCCR0B & B11111000 | B00000100 // לתדר PWM של 244.14 הרץ
// TCCR0B = TCCR0B & B11111000 | B00000101 // לתדר PWM של 61.04 הרץ
תדר PWM זמין עבור D9 & D10:
// TCCR1B = TCCR1B & B11111000 | B00000001 // הגדר טיימר 1 מחלק ל -1 לתדר PWM של 31372.55 הרץ
// TCCR1B = TCCR1B & B11111000 | B00000010 // לתדר PWM של 3921.16 הרץ
TCCR1B = TCCR1B & B11111000 | B00000011 // לתדר PWM של 490.20 הרץ (DEFAULT)
// TCCR1B = TCCR1B & B11111000 | B00000100 // לתדר PWM של 122.55 הרץ
// TCCR1B = TCCR1B & B11111000 | B00000101 // לתדר PWM של 30.64 הרץ
** אנו הולכים להשתמש בסיכה לא. 6 עבור PWM ומכאן הקוד:
// TCCR0B = TCCR0B & B11111000 | B00000001 // לתדר PWM של 62.5 קילוהרץ
רשימת רכיבים:
1. ARDUINO UNO
2. אינדיקטור (100Uh)
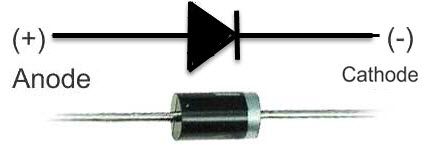
3. DIODE SCHOTTKY
4. קבלים (100uf)
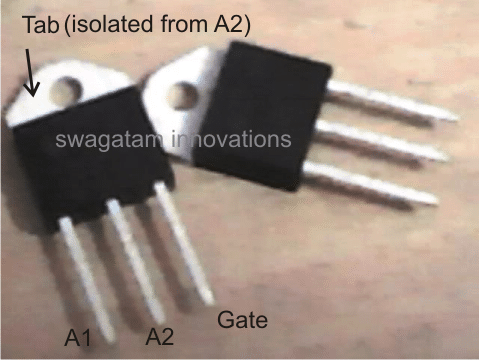
5. IRF540N
6. פוטנציומטר
7. 10k, 100ohm נגן
8. עומס (מנוע במקרה זה)
9.12 V סוללה
דיאגרמת מעגלים


בצע חיבורים כפי שמוצג בתרשים המעגל.
1. חבר את מסופי הקצה של הפוטנציומטר לסיכה 5V ולסיכה הארקה של Arduino UNO בהתאמה ואילו מסוף המגבים שלה לסיכה אנלוגית A1.
2. חבר את סיכת ה- PWM 6 של הארדואינו לבסיס המוספט.
3. מסוף חיובי של הסוללה לניקוז מוספט ושלילי ל p- מסוף של דיודת שוטקי.
4. ממסוף p של דיודת שוטקי, חבר עומס (מנוע) בסדרה עם משרן למסוף המקור של mosfet.
5. כעת חבר מסוף n של דיודת שוטקי למסוף המקור של mosfet.
6. חבר את הקבל 47uf לרוחב המנוע.
7. סוף סוף חבר סיכת קרקע של ארדואינו למסוף המקור של מוספט.
מטרת mosfet:
Mosfet משמש למיתוג מתח המתח בתדר גבוה ולספק זרם גבוה עם פיזור פחות של חום.
מטרת הארדואינו:
למהירות מיתוג גבוהה של mosfet (בתדירות של 65 KHz בערך)
מטרת המשרן:
אם מעגל זה מופעל ללא חיבור משרן, ישנם סיכויים גבוהים לפגוע במוספט בגלל קוצים של מתח גבוה במסוף של מוספט.
כדי למנוע ממוספטים מהקוצים האלה במתח גבוה הוא מחובר כפי שמוצג באיור שכן כאשר מוספאט נמצא בו הוא אוגר אנרגיה וכאשר מוספוט כבוי הוא מוסר את האנרגיה המאוחסנת הזו למנוע.
מטרת דיודת שוטקי:
נניח שדיודת שוטקי אינה מחוברת במעגל. במקרה זה כאשר mosfet כבוי משרן משחרר את האנרגיה שלו לעומס או למנוע אשר משפיעים מאוד על העומס מכיוון שיש לולאה לא שלמה לזרם הזרימה. כך דיודת שוטקי משלימה את הלולאה לזרם הזרם. עכשיו דיודה רגילה לא מחוברת לכאן מכיוון שדיודת שוטקי יש ירידת מתח קדימה נמוכה.כדי לציין את ירידת המתח לאורך העומס.
מטרת הפוטנציומטר:
פוטנציומטר נותן ערך אנלוגי ל arduino (בהתבסס על המיקום של מסוף המגבים) לפיו מתח pwm מתקבל על ידי מסוף השער של mosfet מסיכת PWM 6 של Arduino. ערך זה שולט בסופו של דבר במתח היציאה על פני העומס.
מדוע הנגד מחובר בין שער למקור?
אפילו רעש קטן יכול להפעיל את המוספט. מכאן א משוך את הנגד מחובר בין שער לקרקע כלומר מקור.
קוד התוכנית
Burn this code to arduino:
int m // initialize variable m
int n // initialize variable n
void setup()
B00000001 // for PWM frequency of 62.5 KHz on pin 6( explained under code section)
Serial.begin(9600) // begin serial communication
void loop()
{
m= analogRead(A1) // read voltage value from pin A1 at which pot. wiper terminal is connected
n= map(m,0,1023,0,255) // map this ip value betwenn 0 and 255
analogWrite(6,n) // write mapped value on pin 6
Serial.print(' PWM Value ')
Serial.println(n)
}
הסבר קוד
1. משתנה x הוא ערך המתח המתקבל מסיכה A1 שבה מחובר מסוף המגבים של הסיר.
2. למשתנה y מוקצה הערך הממופה שבין 0 ל 255.
3. ** כפי שכבר הוסבר בסעיף לעיל למעגלים כמו ממיר באק או דחיפה, יש צורך במקור PWM בתדירות גבוהה (בטווח של עשרות KHZ) מכיוון ש- MOSFET זקוק לתדר גבוה למיתוג מושלם וכניסה בתדר גבוה מקטינה את הערך או הגודל. של רכיבי מעגל כמו משרן וקבל.
לפיכך אנו משתמשים בקוד פשוט זה להפקת מתח pwm של כ. תדר 65 קילוהרץ: TCCR0B = TCCR0B & B11111000 | B00000001 // לתדר PWM של 62.5 קילוהרץ בסיכה 6
איך זה עובד:
מכיוון שפוטנציומטר נותן ערך אנלוגי לארדואינו (בהתבסס על המיקום של מסוף המגבים), זה קובע את ערך המתח pwm שמתקבל על ידי מסוף השער של mosfet מסיכת PWM 6 של Arduino.
וערך זה שולט בסופו של דבר במתח היציאה על פני העומס.
כאשר mosfet פועל משרן אוגר אנרגיה וכאשר הוא מכבה אנרגיה מאוחסנת זו משתחררת לעומס כלומר המנוע במקרה זה. ומכיוון שתהליך זה מתרחש בתדירות גבוהה מאוד אנו מקבלים צעד למטה במתח D.C על פני המנוע שתלוי במיקום מסוף המגבים כיוון שמוספט הוא מכשיר תלוי מתח.תמונות אב טיפוס:



 קליפ וידיאו של מעגל ממיר באק מוסבר לעיל באמצעות Arduino
קליפ וידיאו של מעגל ממיר באק מוסבר לעיל באמצעות Arduino
קודם: מעגל מד זרימת מים דיגיטלי פשוט באמצעות ארדואינו הבא: 4 מעגלי חיישני קירבה פשוטים - באמצעות IC LM358, IC LM567, IC 555