
ל רובוט הוא מכונה אלקטרו-מכנית מכוונת על ידי מעגל או תוכנית מחשב. רובוטים החליפו בני אדם בעזרת ביצוע משימות מתמשכות ומסוכנות שבני אדם בוחרים שלא לבצע. מתנה רובוטים מסווגים לקטגוריות שונות בהתבסס על התכונות והביצועים שלהם כמו רובוטים תעשייתיים, רובוטים מסחריים, רובוטי שירות, רובוטים ניידים. הנה רובוט שירות המבצע את המשימות הרציפות לקבל את פני האנשים על ידי תנועת יד המייצגת את 'Namaste' באמצעות הודעה קולית מוקלטת. באופן כללי, כאשר אנו מזמינים אנשים לבית, למסיבות, לאירועי נישואין, למשרד וכו 'עלינו לארגן אדם לברך ולהזמין אותם בכניסה. אם כמות האנשים נמוכה, אז המשימה פשוטה יותר. אבל אם אתה מברך מאות אנשים, המשימה קשה. כדי להתגבר על בעיה זו, הנה פרויקט, כלומר רובוט namaste עם שליטה קולית.

רובוט נמסטה
רובוט Namaste עם שליטה קולית
הרעיון העיקרי של Namaste זה פרויקט הרובוט הוא לשלוט במנועי סרוו השונים דרך לוח ארדואינו. רובוט זה סורק את האנשים שמסביב ומסובב את ראשו ב -180 מעלות. אם הוא מזהה מישהו בקרבת מקום, הוא מאחל לאותו אדם עם Namaste כששתי הידיים לוחצות זו לזו. זו הדרך המסורתית לאחל לאנשים בהודו. ה יישומים של רובוטים לערב בקניונים, פארקים, משרדים כדי למשוך את האנשים.
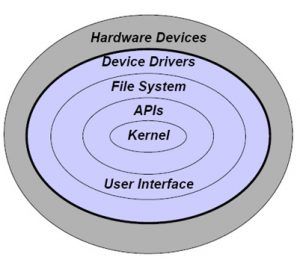
דיאגרמת חסימה של רובוט Namastae עם שליטה קולית
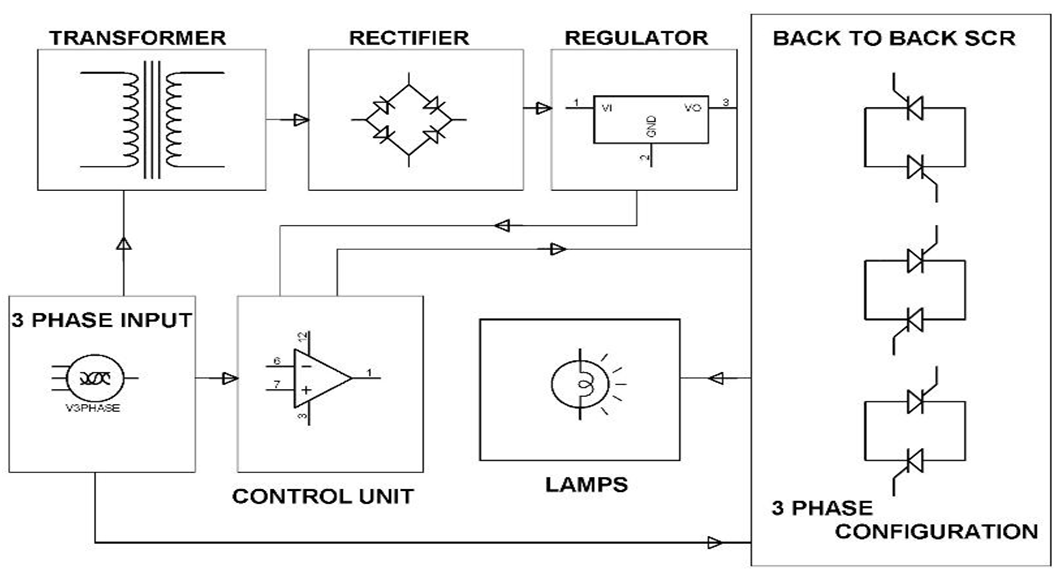
האיור הבא מסמל את דיאגרמת החסימה של הרובוט Namaste עם שליטה קולית. בסוג זה של רובוט מתוכנתים פקודות קוליות. ניתן לחבר את כל לוח הפיתוח לספק הכוח המשותף. התיאור של כל בלוק וחסום הוא כדלקמן. ה ספק כוח נותן את אספקת החשמל לכל המודולים. מודולים אלה דורשים זרם ב- mA ומתח ההפעלה יהיה 5V.

דיאגרמת חסימה של רובוט Namastae עם שליטה קולית
מועצת ארדואינו
ארדואינו הוא סוג אחד של כלי מבוסס על לוח מיקרו-בקר פשוט המשמש לבקרה וחישה של העולם הפיזי מאשר מחשב שולחני. למחשוב פיזי קיימות פלטפורמות מיקרו-בקר שונות. התכונות החשובות של ארדואינו הן תוכנות קוד פתוח וזולות להרחבה, ותוכנת הארדואינו זמינה ככלי קוד פתוח וניתן להרחיב את השפה באמצעות ספריות C ++.

מועצת ארדואינו
חיישן פינג
חיישן הפינג משתמש ב- SONAR כדי לשלוט במרחק האובייקט בסביבתו. זֶה חיישן משמש כ את עיניו של הרובוט לחוש את המכשול. למשל חיישן קירבה. זה נותן דיוק טווח מעולה וקריאות יציבות. פעולת חיישן זה אינה מושפעת מחומר שחור או מאור השמש. המפרט של חיישן הפינג הוא מתח הוא 5V, הזרם הוא 15mA, זווית החיישן אינה> = 15 ומרחק הזיהוי הוא 2 ס'מ ~ 450 ס'מ.

חיישן פינג
הממשק של חיישן פינג עם Arduino מוצג להלן. ישנם ארבעה פינים זמינים לממשק חיישן פינג עם לוח ארדואינו. ארבעת הפינים בלוח הארדואינו הם GND, VCC, ECHO ו- TRIGGER. הפינים על הלוח הם D0-D13, בכך ש 12 ו -13 פינים הם סיכות קלט ופלט.
מיקרו-בקר Arduino מציע לנו ספריית בקרת סרוו המאפשרת לנו להחליף סרוו בקלות. בפרויקט זה השתמשנו ב -5 סרוו כדי לווסת את תנועות הרובוט של Namaste כמו ראש, מרפק ימין, מרפק שמאל, כתף ימין וכתף שמאל. כאן, פינים הקלט / הפלט הדיגיטליים (D5, D6, D9, D10, D1) מסמנים בלוח הארדואינו שהתממשק למנועי סרוו.
השמעת קול IC
IC זה להשמעת קול מציע את ההודעה המוקלטת המתנגנת בקצב התדרים המוגדר מראש. ההפעלה מועברת ליחידת הגברת השמע.

השמעת קול IC
ממסר
ל ממסר הוא סוג של מתג פועלת באופן חשמלי. זרימת הזרם דרך סליל הממסר יוצרת שדה מגנטי המזמין מנוף ומשנה את מגעי המתג.

ממסר
שליטה קולית רובוט Namastae עובד
את העבודה של הרובוט Namaste ניתן לעשות בהליך שלב אחר שלב יחד עם התוצאות המדומות. כאשר הרובוט נמסטה נמצא במצב ראשון, אז מנוע הסרוו s של הרובוט 2, 3, 4, 5 נמצאים במצב OFF או במצב אפס. ראש הרובוט נמסטה מתחלף ממרכז לימין, שמאלה ואז חזרה למרכז בגלל סיבוב של מנוע סרוו 1 מ 0 ° -180 °. תנועת ראש הרובוט מציינת כי הרובוט נמסטה מחפש מכשול. כאשר חיישן הפינג מזהה מכשול כלשהו, מיקום ראשו של הרובוט חוזר למרכז ושרידי מנוע סרוו 1 בזווית של 90 מעלות וכבו. הוא מופעל במצב LOW.
כאשר מנוע סרוו 1 נכבה אז המנועים הנותרים כמו סרוו 4 ו סרוו 5 מפעילים. קו האות מופעל על כתפיו הימניות והשמאליות של הרובוט Namaste. כעת ידיו של רובוט יכולות להגביר את התנועה. מנועי סרוו הכתף מתממשקים לסיכות הכניסה והפלט הדיגיטליות של לוח הארדואינו. עם זאת, קווי האות או הסיכות הללו יהיו גבוהים ומיקום הסרוו שונה ל- 90 °. כעת סרוו 4 וסרוו 5 מכבים.
לבסוף נוכל להסיק כי המטרה העיקרית של שליטה קולית זו הרובוט הוא לספק את השירות של קבלת פנים בנימוס על ידי גילוי אנשים שהולכים מולה. ניתן להשתמש בו במקומות ציבוריים שונים כמו פארקים, קניונים, מסיבות וכו '. אנו מקווים כי הבנתם טוב יותר את המושג הזה. יתר על כן, כל שאלה לגבי מושג זה או מבוסס ארדואינו פרויקטים של רובוטים אנא הוסף את הצעותיך החשובות על ידי תגובה בקטע התגובות למטה.
נקודות זיכוי:
- מועצת ארדואינו חדשות ותצוגות חדשות
- חיישן פינג פרלקסה
- השמעת קול IC kealab
- ממסר awdirect
- רובוט נמסטה canstockphoto





{kind=link}
{kind=link}
{kind=link}
{kind=link}