
מנועים קולי הומצאו בשנת 1965 על ידי V.V Lavrinko. באופן כללי אנו מודעים לעובדה שכוח המניע ניתן על ידי השדה האלקטרומגנטי במנועים המקובלים. אבל, כדי לספק כוח מניע, מנועים אלה משתמשים ב אפקט פיזואלקטרי באולטרסאונד טווח תדרים, שנע בין 20 קילוהרץ ל -10 מגה הרץ ואינו נשמע לבני אדם רגילים. לפיכך, זה מכונה טכנולוגיית USM פיזואלקטרית. טכנולוגיית אולטרסאונד משמשת את ה- USM המשתמשים בכוח הרטט הקולי מרכיב לצורך פעולתם.

מנוע קולי
לפני שנדון בפירוט אודות טכנולוגיה זו עלינו לדעת על המידע בנושא חיישנים קולי , חיישנים פיזואלקטריים ומפעילים פיזואלקטריים.
חיישן פיזואלקטרי

ניתן למדוד את השינויים בכמויות הפיזיקליות כמו מתח, כוח, מתח ותאוצה על ידי המרתם לאנרגיה חשמלית. המכשירים או החיישנים המשמשים לתהליך זה נקראים כחיישנים הפיזואלקטריים. ותהליך זה מכונה ה- אפקט פיזואלקטרי . אם מפעילים מתח על גבי גביש, הלחץ יופעל על אטומי הקריסטל וגורם לעיוות האטומים שהוא 0.1% בלבד.
חיישן קולי

חיישן קולי
המתמרים המייצרים תדרים גבוהים - תדר של סביב 20 קילוהרץ עד 10 מגה הרץ - ומייחסים את המטרה על ידי קריאת מרווח הזמן בין קבלת ההד לאחר שליחת האות נקראים כחיישנים אולטרסאוניים. לָכֵן, ניתן להשתמש בחיישנים קולי לגילוי מכשולים וכדי למנוע התנגשות.
מפעיל פיזואלקטרי

לצורך התאמה עדינה של עדשות מצלמה, מראה, כלי עיבוד וציוד דומה אחר נדרש בקרת תנועה מדויקת. בקרת תנועה מדויקת זו יכולה להיות מושגת על ידי המפעילים הפיזואלקטריים. ניתן להמיר את האות החשמלי לתזוזה פיזית מבוקרת במדויק באמצעות מפעיל פיזואלקטרי. אלה משמשים לשליטה על השסתומים ההידראוליים והמנועים המיועדים המיוחדים.
טכנולוגיית מנוע אולטרה סאונד פיזואלקטרית
פשוט נוכל לקרוא לטכנולוגיית האולטראסאונד כהפוכה מהאפקט הפיזואלקטרי מכיוון שבמקרה זה ה אנרגיה חשמלית מומר לתנועה. לפיכך, אנו יכולים לכנות זאת כטכנולוגיית USM פיזואלקטרית.
החומר הפיזואלקטרי בשם עופרת זירקונייט טיטנאט וקוורץ משמש לעתים קרובות מאוד עבור USMs וגם עבור מפעילים פיזואלקטריים למרות שהמפעילים הפיזואלקטריים שונים מ- USMs. החומרים כמו ליתיום ניובט וכמה חומרי קריסטל בודדים אחרים משמשים גם ל- USM וטכנולוגיה פיזואלקטרית.
ההבדל העיקרי בין המפעילים הפיזואלקטריים לבין ה- USM נקבע כרטט של הסטטור במגע עם הרוטור, שניתן להגביר אותו באמצעות התהודה. המשרעת של תנועת המפעיל היא בין 20 ל 200 ננומטר.
סוגי מנועים אולטרה סאונד
ה- USM מסווגים לסוגים שונים על בסיס קריטריונים שונים, שהם כדלקמן:
סיווג USM על סמך סוג פעולת סיבוב המנוע
- מנועים מסוג סיבובי
- מנועים מסוג ליניארי
סיווג USM על סמך צורת הוויברטור
- סוג מוט
- מעוצב
- מעוצב גלילי
- סוג טבעת (מרובע)
סיווג על פי סוג גל הרטט
- סוג גל עומד - הוא מסווג עוד לשני סוגים:
- חַד כִּוּוּנִי
- דו - כיווני
- סוג גל מתפשט או סוג גל נודד
עבודה של מנועים אולטרה סאונד

עובד על מנוע קולי
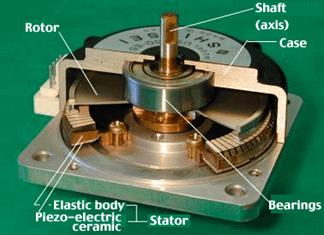
הרטט מושרה לתוך הסטטור של המנוע, והוא משמש להעברת התנועה לרוטור וגם לווסת את כוחות החיכוך. הגברה ועיוותים (מיקרו) של חומר פעיל משמשים לייצור התנועה המכנית. ניתן להשיג את תנועת המאקרו של הרוטור על ידי תיקון התנועה המיקרו באמצעות ממשק החיכוך בין סטאטור והרוטור .
ה מנוע קולי מורכב מסטטור ורוטור. פעולת ה- USM משנה את הרוטור או את המתרגם הליניארי. הסטטור של ה- USM מורכב מקרמיקה פיזואלקטרית ליצירת רטט, מתכת של הסטטור להגברת הרטט הנוצר ומחומר חיכוך ליצירת קשר עם הרוטור.
בכל פעם שמופעל מתח נוצר גל נע על פני מתכת הסטטור הגורם לסיבוב הרוטור. מכיוון שהרוטור נמצא במגע עם מתכת הסטטור, כאמור לעיל - אך רק בכל פסגה של הגל הנע - הגורם לתנועה האליפטית - ועם תנועה אליפטית זו, הרוטור מסתובב בכיוון ההפוך לכיוון הכיוון גל נוסע.
תכונות ויתרונות של מנועים קולי
- אלה קטנים בגודלם ומעולים בתגובה.
- אלה הם בעלי מהירות נמוכה של עשר עד כמה מאות סל'ד ומומנט גבוה, ולכן אין צורך בהילוכים.
- אלה מורכבים מכוח בעל אחיזה גבוהה, וגם אם הכוח כבוי, הם אינם זקוקים לבלם ומצמד.
- הם קטנים, דקים ובעלי משקל נמוך בהשוואה למנועים אלקטרומגנטיים אחרים.
- מנועים אלה אינם מכילים שום חומר אלקטרומגנטי והם אינם מייצרים גלים אלקטרומגנטיים. לכן, ניתן להשתמש בהם אפילו באזורי שדה מגנטי גבוהים מכיוון שאלה אינם מושפעים מהשדה המגנטי.
- למנועים אלה אין הילוכים, ורטט תדרים בלתי נשמע משמש להנעת מנועים אלה. לכן, הם לא מייצרים שום רעש וההפעלה שלהם שקטה מאוד.
- בקרת מהירות ומיקום מדויקים אפשריים במנועים אלה.
- קבוע הזמן המכני של מנועים אלה הוא פחות מ- 1ms ו- בקרת מהירות עבור מנועים אלה הוא צעד פחות.
- מנועים אלה בעלי יעילות גבוהה מאוד, ויעילותם אינה רגישה לגודלם.
שפל של מנועים אולטרה סאונד
- יש צורך באספקת חשמל בתדירות גבוהה.
- מכיוון שמנועים אלה פועלים על פי חיכוך, העמידות פחותה מאוד.
- מנועים אלה בעלי מאפייני מומנט מהירות צונחים.
יישומים של מנועים קולי
- משמש למיקוד אוטומטי של עדשת המצלמה.
- משמש במכשירים ושעונים לטיפול בנייר קומפקטי.
- משמש בהעברת חלקי מכונות.
- משמש לייבוש וניקוי קולי.
- משמש להזרקת שמן למבערים.
- משמש כמנועים הטובים ביותר הידועים כמציעים פוטנציאל גבוה למזעור ציוד.
- משמש בסריקת הדמיית תהודה מגנטית MRI ברפואה.
- משמש לשליטה בראשי הדיסק של המחשב כמו תקליטונים, דיסק קשיח וכונני CD.
- משמש ביישומים רבים בתחומי הרפואה, החלל והחלל רובוטיקה .
- משמש לשליטה אוטומטית במסך הגלגול.
- בעתיד, מנועים אלה עשויים למצוא יישומים בתחומים כמו תעשיית רכב, מיקום ננו, מיקרואלקטרוניקה, טכנולוגיית מערכת מיקרו אלקטרו מכנית ומוצרי צריכה.
מאמר זה דן במנועים קולי פיזואלקטריים, חיישנים קולי, חיישנים פיזואלקטריים, מפעילים פיזואלקטריים, עבודה של USM, יתרונות, חסרונות ויישומים של USM בקצרה. לקבלת מידע נוסף אודות הנושאים הנ'ל, אנא פרסם את שאילתותיך על ידי תגובה למטה.
נקודות זיכוי:
- מנוע קולי מאת בסמינרסוני
- חיישן פיזואלקטרי מאת אימג'סקו
- חיישן קולי מאת iseerobot
- מפעיל פיזואלקטרי מאת פלטפורמת רובוטים
- עבודה של UltrasonicMotors מאת אֶלֶקטרוֹדָה












{kind=link}
{kind=link}
{kind=link}
{kind=link}