מכונה חשמלית ש ממיר אנרגיה חשמלית לאנרגיה מכנית נקרא מנוע חשמלי. בראש ובראשונה מנוע חשמלי הוא מכשיר אלקטרוסטטי פשוט שנוצר על ידי הנזיר הסקוטי אנדרו גורדון בשנות ה -40 של המאה העשרים. אבל בשנת 1821, מייקל פאראדיי הפגין את המרת האנרגיה החשמלית לאנרגיה מכנית.
מנועים חשמליים מסווגים בעיקר לשתי קטגוריות: מנועי AC ו- מנועי DC . שוב, כל קטגוריה מחולקת לסוגים רבים. עומסים רבים כגון מיקסר, מטחנה, מאווררים וכו ', מכשירי חשמל ביתיים הנפוצים ביותר בהם אנו יכולים למצוא סוגים שונים של מנועים וניתן להפעיל אותם במהירויות שונות עם בקרת מהירות של המנועים. במאמר זה, נדבר על אחד הסוגים העיקריים של מנועי DC, כלומר מנוע צעד ושליטתו באמצעות המיקרו-בקר.
מנוע צעדים
סינכרוני ו מנוע DC ללא מברשות הממיר פולסים חשמליים לתנועות מכניות ובכך, מסתובב בשלבים עם זווית מסוימת בין כל שלב להשלמת סיבוב מלא מכונה מנוע צעד. הזווית בין שלבי הסיבוב של מנוע הצעד נקראת כזווית הצעד של המנוע.

מנוע צעדים
מנועי צעד מסווגים לשני סוגים בהתאם להתפתלותם: מנועי צעד חד קוטביים ומנועי צעד דו קוטביים. מנוע הצעד החד קוטבי משמש לעתים קרובות ביישומים רבים בשל קלות התפעול שלו בהשוואה למנוע הצעד הדו קוטבי. אך ישנם סוגים שונים של מנועי צעד כגון מנוע צעד מגנטי קבוע, מנוע צעד בעל רתיעה משתנה ומנוע צעד היברידי.
בקרת מנוע צעד
ניתן לשלוט על מנוע הצעד בטכניקות שונות, אך כאן אנו דנים בבקרת המנוע הצעד באמצעות מיקרו-בקר Atmega . 89C51 הוא מיקרו-בקר של ה- משפחת מיקרו-בקר 8051 .

דיאגרמת חסימות של בקרת מנוע צעד
דיאגרמת החסימה של בקרת מנוע צעד באמצעות מיקרו-בקר 8051 מוצגת באיור עם ספק כוח , מיקרו-בקר, מנוע צעד ובלוקים למתגי בקרה.
2 שיטות לעיצוב מעגל בקרת מנוע צעד
בקר המנוע הצפוני מתוכנן באמצעות מיקרו-בקרים 8051 ומעגל מיתוג לבקרת מהירות מנוע הצעד. ניתן לתכנן את מעגל מתג הבקרה באמצעות מתגי טרנזיסטור או על ידי שימוש בבקר מנוע צעד IC כמו ULN2003 במקום הטרנזיסטורים.
1. מעגל בקרה באמצעות בקר מנוע צעד IC
ניתן לסובב את מנוע הצעד החד-קוטבי על ידי הפעלת סלילי הסטטור ברצף. רצף אותות המתח המופעלים על סלילי המנוע או ההובלות מספיק בכדי להניע את המנוע, ולכן אין צורך במעגל נהג לבקרת כיוון הזרם בסלילי הסטטור.

בקרת מנוע צעד באמצעות IC
מנוע הצעדים הדו פאזי מורכב מארבעה חוטי קצה המחוברים לסלילים ושני חוטים משותפים המחוברים לשני הקצות מובילים ליצירת שני שלבים. הנקודות המשותפות ונקודות הסיום של שני השלבים מחוברות לקרקע או ל- Vcc ולסיכות המיקרו-בקר, בהתאמה. לסיבוב המנוע יש לנקוט את נקודות הקצה של שני השלבים. בעיקר מתח מוחל על נקודת הסיום הראשונה של השלב 1, ומתח נוסף מוחל על נקודת הסיום הראשונה של השלב 2, וכן הלאה.
ניתן להפעיל את מנוע הצעדים במצבים שונים כגון מצב דריכת כונן גל, מצב דריכה לכונן מלא ומצב דריכת חצי כונן.
מצב דריכת כונן גל
על ידי חזרה על הרצף שלעיל, ניתן לסובב את המנוע במצב דריכת כונן גל בכיוון השעון או נגד כיוון השעון בהתבסס על בחירת נקודות הקצה. הטבלה שלהלן מציגה את רצף שלב האות למצב דריכת כונן גל.


מצב דריכת כונן גל
מצב דריכת כונן מלא
הפעלת שני נקודות הקצה של שלבים שונים בו זמנית משיגה מצב דריכת כונן מלא. הטבלה מציגה את רצף שלב האות עבור מצב הכונן המלא.


מצב דריכת כונן מלא
חצי דריכת מצב דריכה
השילוב בין מדרגות הגל ומצבי דריכת כונן מלא משיג מצב דריכת חצי כונן. לפיכך, במצב זה, זווית הצעד מחולקת לחצי. הטבלה מציגה את רצף שלב האות של מצב דריכת חצי נסיעה.


חצי דריכת מצב דריכה
באופן כללי, זווית הדריכה תלויה ברזולוציה של מנוע הצעד. גודל הצעדים וכיוון הסיבוב הם ביחס ישר למספר וסדר רצף הקלט. מהירות הסיבוב של הפיר תלויה בתדירות רצף הקלט. המומנט ומספר המגנטים הממוגנטים בכל פעם הם פרופורציונליים.
מנוע הצעד דורש זרם של 60mA, אך דירוג הזרם המרבי של מיקרו-בקרת Atmega AT89C51 הוא 50mA. לכן, בקר מנוע צעד IC נעשה שימוש בממשק בין מנוע הצעד לבין המיקרו-בקר לצורך העברת האותות.
2. מעגל מתג בקרה באמצעות טרנזיסטורים
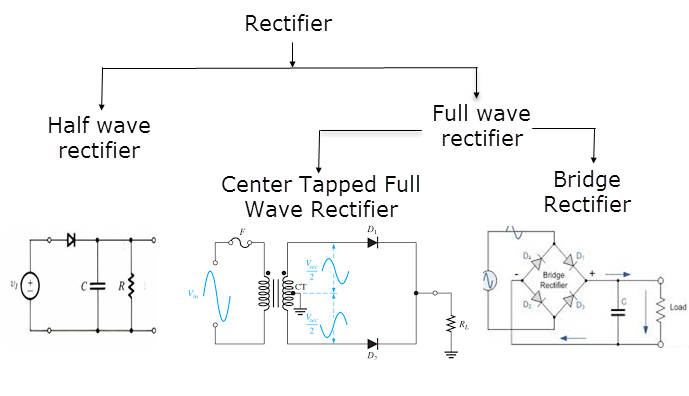
אספקת החשמל למעגל יכולה להינתן על ידי הורדת המתח מ -230 וולט ל -7.5 וולט באמצעות שנאי למטה, ואז תיקון על ידי מיישר גשר עם דיודות . יציאה מתוקנת זו מוזנת לקבל פילטר, ואז עוברת דרך ווסת המתח. הפלט המווסת 5V מתקבל מווסת המתח. PIN9 לאיפוס מחובר בין הקבל לנגד.

מעגל בקרת מנוע צעד באמצעות טרנזיסטור
באופן כללי, מנוע הצעד מורכב מארבעה סלילים כפי שמוצג באיור. לכן, כדי להניע את המנוע, נדרשים ארבעה מעגלים של נהג מנוע. במקום להשתמש בבקר מנוע הצעד IC כדי להניע את המנוע, ארבעה טרנזיסטורים מחוברים כמעגלי הנהג בפיני 21, 22, 23 ו -24 של המיקרו-בקר, בהתאמה.
אם הטרנזיסטורים מתחילים להוביל, אז ייווצר שדה מגנטי סביב הסליל שיגרום לסיבוב המנוע. מהירות מנוע הצעד הינה פרופורציונלית ישירות לתדר הדופק הקלט. מתנד קריסטל מחובר לסיכות 18 ו -19 כדי לספק תדר שעון מיקרו-בקר של כ -11.019 מגה-הרץ.
ניתן לחשב את זמן הביצוע של כל הוראה באמצעות הנוסחה הבאה
זמן = ((C * 12)) / f
כאשר C = מספר המחזור
ו- F = תדר הגביש
אחד המעגלים מבוססי היישומים המשתמש במנוע צעד לסיבוב פאנל סולארי מתואר להלן.
בקרת מנוע צעד באמצעות מיקרו-בקר מתוכנת 8051
פרויקט Sun Tracking Panel Panel מיועד לייצר את כמות האנרגיה המרבית על ידי התאמה אוטומטית של הפאנל הסולארי. בפרויקט זה, מנוע צעד הנשלט על ידי מיקרו-בקר מתוכנת ממשפחת 8051, מקושר לפאנל הסולרי כדי לשמור על פני הפאנלים הסולאריים מאונכים תמיד לשמש.

בקרת מנוע צעד באמצעות מיקרו-בקר על ידי Edgefxkits.com
ה מיקרו-בקר מתוכנת מייצר פולסים חשמליים מדורגים במרווחי זמן קבועים למנוע הצעד לסיבוב הפאנל הסולארי. נהג IC משמש להנעת מנוע צעד מכיוון שהבקר אינו מסוגל לספק את דרישות ההספק של המנוע.
אנא השאירו את הצעותיכם, משובכם ושאלותיכם על ידי פרסום הערות בקטע התגובות למטה. אנו נעשה כמיטב יכולתנו לעזור לך טכנית בכל הנוגע למאמר זה פיתוח פרויקטים של חשמל ואלקטרוניקה באמצעות מנוע הצעד.