בפוסט זה נדון ביסודות הרכבת גופי הארבע-קווטר באמצעות צינורות וברגים מאלומיניום, בחלקים המאוחרים של המאמר נדון גם בנוגע למעגל מזל'ט פשוט שיכול לשמש להטסת מכלול מזל'ט קטן ללא תלות במיקרו-בקרים מורכבים.
Quadcopter הוא אולי המכונה המעופפת הפשוטה ביותר הדורשת כמות מינימלית של דיוק אווירודינמי וסיבוכים, ולכן אין זה מפתיע, היא עשויה לזכות בפופולריות עצומה בקרב התחביבים השונים שיוכלו לבנות את זה בהצלחה ... מכונה שהם יוכלו לטוס בפועל ו שליטה כרצונם.
הדינמיקה של Quadcopter
העובדה שמזל'ט quadcopter הוא הפשוט ביותר מבחינת הטכניות והדינמיקה נובעת למעשה ממעורבותם של 4 מדחפים ומבנה מסגרת מאוזן, המאפשרים למכונה לטוס בשיווי משקל טוב יחסית, גם בתנאי אקלים קשים.
אך הפשטות גם מרמזת כי ייתכן שהמערכת לא תהיה יעילה כמו דגמי המטוסים והצ'ופר הקונבנציונליים שתוכננו בצורה מורכבת להפגין יעילות קיצונית מבחינת מהירות וצריכת דלק, וכמובן יכולת העומס ... כל אלה יכולים להיות בעצם חסר מערכת quadcopter אופיינית.
אף על פי כן, מבחינת פרויקט תחביב, מכונה זו הופכת להיות הבחירה האידיאלית עבור מרבית החובבים שמוצאים אותה מאוד משעשעת ומסקרנת לבנות מכונה מעופפת משל עצמם בבית, שבסופו של דבר 'מקשיבה' ועפה לכל כיוון שהוא. המשתמש מעדיף שהוא יעבור.
עם זאת, עבור שחקן חדש, שעשוי להיות טכני לא כל כך מושכל, עשוי למצוא אפילו מכונה פשוטה זו מסובכת מאוד להבנה, פשוט משום שרוב המידע הקשור המוצג באתרי האינטרנט הרבים אינו מצליח לדון במושג בבהירות וב'שפה ' יכול להתאים להדיוט.
מאמר זה נכתב במיוחד עבור אותם אנשים לא כל כך טכניים שמעוניינים לבנות מכונת תעופה מפוארת אך מתקשים לעכל את הנושא.
מדוע כל כך קל לבנות Quadcopters היום
האם שאלתם את עצמכם פעם מדוע קלים כל כך קל לבנות quadcopters ומזל'טים בעולם של ימינו ואולי אי אפשר היה להשתמש בהם קודם לכן באמצעות חשמל?
זה בעצם בגלל הפיתוח והשיפור של סוללות ה- Li-Ion. אלו סוגים יעילים ביותר של סוללות הקיימות כיום, המציעות יחס כוח ומשקל מרשים. יחד עם זאת, המצאתם של מנועי BLDC ומנועי מגנט קבועים מעודנים תרמו גם להפיכת המזל'טים לבנייה קלה.
סוללת Li-Ion מסוגלת לספק כמות מדהימה של מומנט סיבובי על המנועים שהופכת למספיקה מספיק כדי לדחוף את יחידת ה quadcopter לגובה רב מעל הקרקע תוך שניות, וגם מאפשרת לה להישאר באוויר למשך זמן רב. הביצועים יעילים מאוד ושימושיים.
איך Quadcopter עף
עכשיו בואו נקפוץ נכון ונבין מהם הדברים החיוניים הנדרשים בכדי לגרום ל quadcopter לטוס בהצלחה. להלן יסודות כדי לגרום למכונה לעוף בצורה חלקה:


1) בעיקרון המכונה דורשת גוף יציב וחזק, אך משקל קל במיוחד. זה יכול להיות מפוברק או להרכיב באמצעות צינורות שחול אלומיניום מרובעים חלולים, על ידי קידוח חורים מתאים וקיבוע המסגרת בעזרת אגוזים וברגים.
2) המבנה צריך להיות בצורה של '+' מושלם או 'x' מושלם, זה לא משנה כל עוד הזווית בין צינורות 'המעבר' היא 90 מעלות כל אחת.

אלמנטים בסיסיים הדרושים לבניית quadcopter ניתן לראות בתמונה הבאה:

סימולציית הרכבה חלקית
הדמיית האנימציה המחוספסת שלמטה מראה כיצד להרכיב את האלמנטים המוצגים לעיל יחד:

כיצד לבנות מסגרת Quadcopter
ניתן לרכוש את האלומיניום למסגרת '+' על ידי חיתוך וגודל מתאים של צינורות שחול אלומיניום מוכנים, כמוצג להלן:

גודל המסגרת הוא יחסי ולכן אינו מכריע, ניתן לבנות מסגרת רחבה כאשר המנועים מותאמים זה מזה או לבנות מבנה מסגרת קומפקטי למדי כאשר המנועים אינם רחבים מדי זה מזה ... אם כי יש לוודא כי מדחפים מרוחקים זה מזה כדי לאפשר שיווי משקל ושיווי משקל טובים יותר.
3) על מבנה המסגרת '+' להיות מותקן פלטפורמה מרובעת בקטע המרכזי בו זרועות המסגרת נפגשות וחוצות זו את זו. זה יכול להיות פשוט פלטת אלומיניום מלוטשת היטב עם מימדים מתאימים כדי להכיל בנוחות את כל האלקטרוניקה והחיווט הדרושים.
לפיכך לוחית מרכזית זו או הפלטפורמה נדרשים בעצם להתקנת ושיכון האלקטרוניקה של המערכת אשר תהיה בסופו של דבר אחראית לשליטה על ה quadcopter שלך.
4) לאחר השלמת המסגרת הנ'ל, המנועים נדרשים להתקבע על קצות המוטות, כפי שמוצג באיורים לעיל.
5) אין צורך לומר כי כל עבודת ההתאמה צריכה להיעשות בדיוק מירבי, וביישור מושלם, הדבר עשוי לדרוש שיוך של בונה מנוסה לתפקיד.
מכיוון שכל דבר בתכנון הוא בזוגות, יישור האלמנטים במדויק לא יהיה קשה מדי, אלא רק גודל והתאמת הזוגות עם כמה שיותר דמיון, מה שבתורו יבטיח רמה מקסימלית של איזון, שיווי משקל וסינכרון. למערכת.
לאחר בניית המסגרת, הגיע הזמן לשלב את המעגלים האלקטרוניים עם המנועים הרלוונטיים. יהיה צורך לעשות זאת בהתאם להוראות המופיעות במדריך המעגל הנתון.
ניתן להתקין את המעגלים בצד התחתון של הלוח המרכזי עם מעטה מתאים או מעל הלוח, ושוב עם ארון מתאים לסגירתו בחוזקה.

הבנת כיוון הסיבוב של המדחפים
ניתוח כיוון הסיבוב של מדחפי המנוע לצורך הרמה מאוזנת של:
בהתייחס לסימולציה המונפשת לעיל, כיוון הסיבוב של מדחפי המנוע צריך להיות מיושר בצורה הבאה:
זה פשוט צריך להיות כזה שהמנועים בקצות המוט האחד צריכים להיות זהים אך שונים מכיוון המנוע השני של המוט, כלומר אם למוט אחד המנועים מסתובבים בכיוון השעון, אז המנועים בקצוות האחרים משלימים מוט צריך להיות מכוון כך שיסובב נגד כיוון השעון. כיוון.
אנא עיין בסימולציה לעיל כדי להבין נכון את התנועה הפועלת נגד של המנועים שייתכן שיהיה צורך להקצות למנועים כדי להבטיח נטילה מאוזנת של
כיצד לשלוט על כיוון ה quadcopter על ידי שליטה על מהירות המנועים.
כן, ניתן לכוונן את כיוון המעופף של ה quadcopter על פי רצונך ורצונך על ידי פשוט להחיל מהירויות שונות (RPM) על המנועים הרלוונטיים.
התמונות הבאות מראות כיצד ניתן להחיל את העברת המהירות הבסיסית על המנועים הרלוונטיים על מנת להשיג ולבצע כל כיוון טיסה רצוי למכונה:




כפי שצוין בתרשימים לעיל, על ידי הפחתה מהירה של קבוצה של מנועים, או הגדלת מהירות של קבוצת מנועים מנוגדת, או כוונון המהירויות לפי העדפתם האישית, ניתן לגרום ל quadcopter לנוע באוויר בכל כיוון ספציפי רצוי.
התמונות שלעיל מציינות את הכיוונים הבסיסיים, כמו קדימה, אחורה, ימינה, שמאלה וכו '... אולם כל כיוון מוזר אחר יכול גם להיות מיושם ביעילות על ידי התאמת מהירויות של המנועים הרלוונטיים או יכול להיות רק מנוע יחיד.
לדוגמא על מנת לאלץ את המכונה לטוס לכיוון N / W, ניתן להגדיל את מהירות מנוע ה- S / E, וכדי לאפשר למכונה לעוף בכיוון ה- N / E, את מהירות ה- S / מנוע W עשוי להיות מוגבר ... וכן הלאה. זה רק צריך להתאמן עד שהשליטה המלאה על ה quadcopter הופכת להיות מושגת ומשולטת על ידי המשתמש.
תכנון quadcopter מעשי
עד כה למדנו על הבנייה הבסיסית של גוף המזל'ט והחומרה, עכשיו בואו ונלמד כיצד להכין קוואד-קופטר או מעגל מזל'ט במהירות ובזול באמצעות רכיבים רגילים מאוד. באחד מההודעות הקודמות שלי למדנו כיצד להכין מכונת טיסת quadcopter מורכבת יחסית ויעילה ללא שימוש במיקרו-בקר, למידע נוסף תרצה לעבור על ההודעות הבאות:
מעגל שלט רחוק ללא MCU | מעגל חשמלי
במאמר הנוכחי אנו מנסים להפוך את העיצוב הנ'ל לפשוט בהרבה על ידי ביטול המנועים ללא הברשה והחלפתו במנועים מוברשים, וכתוצאה מכך מאפשרים להיפטר מהמתחם. מודול מעגל נהג BLDC .
מכיוון שפרטי הבנייה המכנית של ה quadcopter נדונו כבר לעיל באופן מקיף, אנו נעסוק רק בסעיף תכנון המעגל ונלמד כיצד ניתן לבנות אותו להטיס את מעגל הזמזום הפשוט ביותר המוצע.
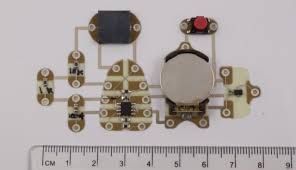
כפי שצוין קודם, Quadcopter פשוט זה דורש רק את המודולים הבסיסיים לשלט רחוק RF כפי שמוצג בתמונה לדוגמה הבאה:

אתה תצטרך ל קנו את המודולים RF האלה מכל חנות מקוונת או מסוחר חילוף אלקטרוני מקומי:
מלבד האמור לעיל RF מרחוק מודולים כמו כן יידרשו 4 מנועים מוברשים מגנטים קבועים המהווים למעשה את לב מכונת המזל'טים. זה יכול להיות כמפורט בתמונה הבאה עם התיאורים הנתונים, או כל דבר אחר כמפרט המשתמש הדרוש:

מפרט חשמלי של המנוע:
- 6 וולט = מתח הפעלה (שיא 12 וולט)
- 200mA = זרם הפעלה
- 10,000 = סל'ד
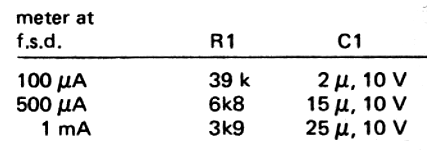
רשימת חלקים
- 1K, 10K 1/4 וואט = 1 כל אחד
- קבלים 1uF / 25V = 1no
- מוגדר מראש 10K או 5K = 1no
- Rx = נגד חוט תיל 5 וואט, ערך לאישור עם ניסוי.
- IC 555 = 1no
- 1N4148 דיודות = 2 מספרים
- IRF9540 Mosfet = 1no
- 6V מוברש מנוע סוג = 4no
- חוטים גמישים, הלחמה, שטף וכו '.
- PCB למטרות כלליות להרכבת החלקים הנ'ל
- מודול שליטה מרחוק RF 4 ערוצים, כמוצג בתמונות הרלוונטיות.
- ערוצי אלומיניום, ברגים, אגוזים, צלחות וכו 'כמוסבר במאמר.
- סוללה כמוצג להלן:

כיצד להגדיר את מקלט השלט רחוק עם המנועים
לפני שנבין כיצד להגדיר את מקלט השלט רחוק עם מנועי ה quadcopter, יהיה חשוב ללמוד כיצד אמורים להתאים או ליישר את מהירויות המנוע ליצירת התנועות שמאלה, ימינה, קדימה, אחורה.
בעיקר ישנן שתי דרכים בהן ניתן לאפשר quadcopter לנוע, שנמצאות במצב '+' ו- 'x'. בתכנון שלנו אנו משתמשים במצב התנועה הבסיסי '+' עבור מזל'ט שלנו, כפי שמצוין בתרשים הבא:

בהתייחס לתרשים לעיל אנו מבינים שעלינו פשוט להגדיל כראוי את מהירויות המנועים הרלוונטיים לביצוע התמרונים הכווניים הרצויים על מזל'ט.
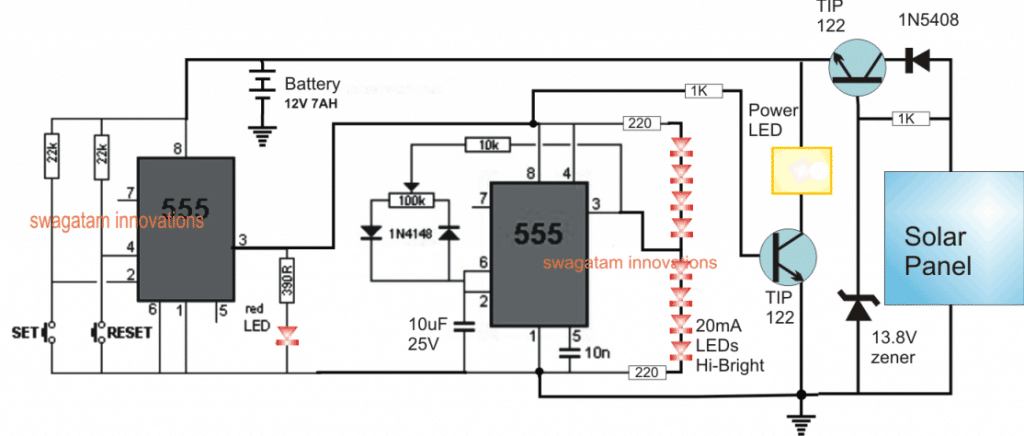
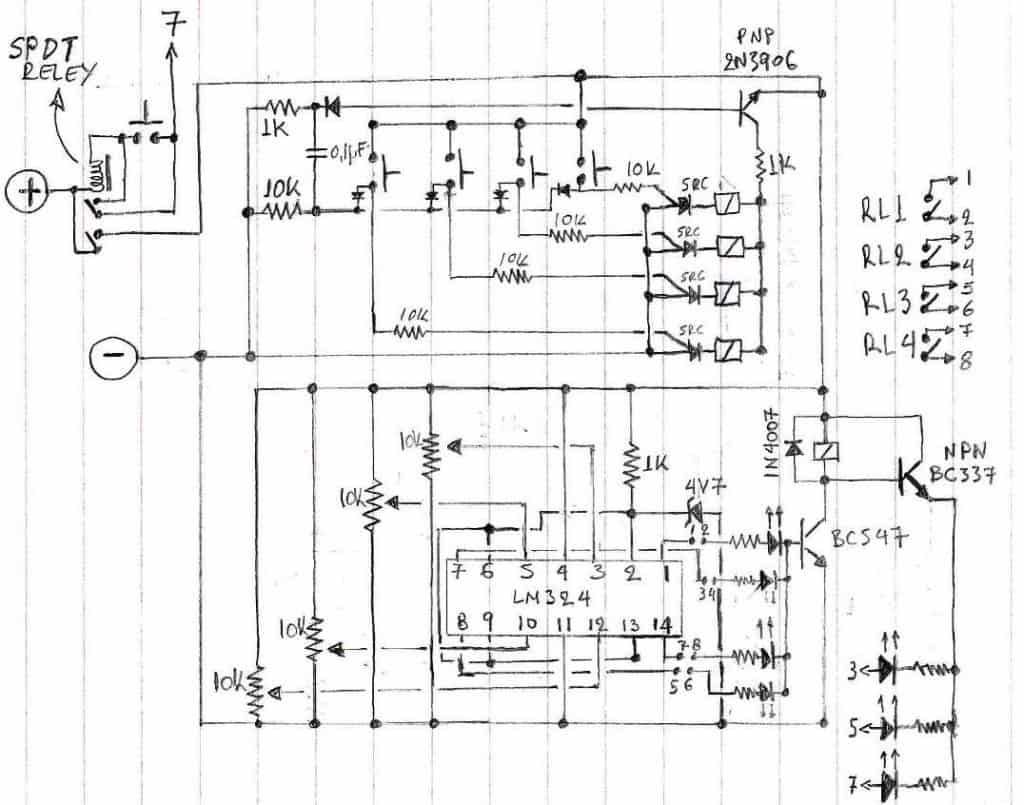
ניתן לאכוף את עליית המהירויות הזו על ידי קביעת תצורה של ממסרי השלט הרחוק בהתאם לתרשים החיווט הבא. בתרשים למטה אנו יכולים לראות מעגל IC 555 PWM מחובר עם 4 הממסרים של מודול מקלט השלט רחוק של 6 הממסרים (ממסר אחד אינו בשימוש וניתן להסיר אותו פשוט כדי לגרום למרחב ומשקל).
התאמת ה- PWM
כפי שניתן לראות בתרשים, הזנת ה- PWM מחוברת לכל מגעי ה- N / C של הממסרים, מה שמרמז שבדרך כלל ה- quadcopter יעבור דרך הזנת PWM אחידה ושווה זו, שמעגל החובה שלה יכול להיות מותאם בתחילה כך ה- Quadcopter מסוגל להשיג כמות מוגדרת של דחף וגובה.
ניתן לעשות זאת בניסויים על ידי התאמה מתאימה של סיר ה- PWM המוצג.
כיצד להגדיר את אנשי הקשר ממסר
ניתן לראות את מגעי ה- N / O של הממסרים מחוברים ישירות עם האספקה החיובית, כך שבכל פעם שלוחצים על כפתור רלוונטי על מכשיר המשדר המרוחק, ממסר המקביל מופעל במודול המקלט, אשר בתורו מאפשר למנוע הרלוונטי להגיע את הספק מלא של 12 וולט מהסוללה.
הפעולה הנ'ל מאפשרת למנוע המופעל לצבור מהירות רבה יותר משאר המנועים המאפשר לרבע הארבע-עשר לנוע לכיוון שנקבע.
ברגע ששחרר את כפתור השלט הרחוק, המזל'ט נעצר מיידית וממשיך לרחף במצב הקבוע.
באופן זהה, ניתן להשיג תנועות כיוון אחרות פשוט על ידי לחיצה על הכפתורים האחרים שהוקצו במכשיר הרחוק.
הממסר העליון ביותר הוא להבטחת נחיתה בטוחה של המכונה, זה נעשה על ידי הוספת נגד זרם זרם בסדרה עם מגע ה- N / O של הממסר המוצג.
יש לחשב את ערך הנגד הזה עם ניסויים כלשהם, כך שהרביעי המסוק מרחף מעל כמה מטרים מעל הקרקע בכל פעם שמנגד זה מועבר דרך הממסר המצורף.
תרשים מעגלים

הממסרים המוצגים הם החלק של מקלט מודול ה- RF, שמגעיו בתחילה אינם מחוברים (ריק כברירת מחדל) ויש לחבר אותם כמצוין בתרשים לעיל.
מקלט ה- RF המרוחק אמור להיות מותקן בתוך ה quadcopter וממסריו מחוברים עם המנועים והסוללה הרלוונטיים בהתאם לפריסה המוצגת לעיל.
אתה יכול לראות כמה מחברים (בצבע ירוק) אשר יכולים להוסיף משקל על המזל'ט שלא לצורך. אתה יכול להסיר את כולם כדי להפחית במשקל, ולחבר את החוטים הרלוונטיים ישירות ל- PCB באמצעות הלחמה.
איך המזל'ט זז:
כפי שהוסבר בדיון לעיל, כאשר לוחצים על כפתור מרוחק מסוים, הוא מפעיל את הממסר המתאים של מודול ה quadcopter גורם למנוע הרלוונטי לנוע מהר יותר.
פעולה זו בתורה מאלצת את המכונה לנוע בכיוון ההפוך למנוע המועבר לסיבוב בסל'ד המהיר יותר.
כך לדוגמא, הגדלת מהירות המנוע הדרומי גורמת למכונה לנוע לכיוון צפון, הגדלת המנוע הצפוני גורמת לה לנוע דרומה, באופן דומה הגדלת מהירות המנוע המזרחית גורמת לה לנוע מערבה ולהיפך.
מעניין שהגדלת המנועים הדרום / מזרחיים מאפשרת ל quadcopter לנוע לכיוון צפון / מערב הנגדי שנמצא במצב אלכסוני .... וכן הלאה.
היתרונות והחסרונות של המעגל לשליטה מרחוק פשוטה של Qaudcopter הוסבר לעיל.
יתרונות
- זול, וקל לבנייה אפילו על ידי חובב חדש יחסית.
- אינו מצריך פעולות ג'ויסטיק מורכבות.
- ניתן לשלוט באמצעות מודול שליטה מרחוק יחיד בעל 6 ערוצים
חסרונות
- פחות יעיל מבחינת גיבוי הסוללה עקב מעורבותם של מנועים מוברשים
- מהירות הכיוון היא קבועה ולא ניתן לשנות אותה באמצעות מכשיר השלט הרחוק
- התמרון לא יכול להיות חלק ולא קצת מטומטם בזמן החלפת הכפתורים.
קודם: הוסבר נגד חישה בכוח הבא: מחלק מתח קיבולי