המהפך הוא מכשיר חשמלי הממיר אספקת כניסת DC למתח AC סימטרי בסדר גודל ותדר סטנדרטיים בצד היציאה. זה נקרא גם בשם ממיר DC ל- AC . קלט ופלט אידיאלי של מהפך ניתן לייצג בצורות גל סינוסואידיות ולא סינוסואידיות. אם מקור הקלט למהפך הוא מקור מתח, אומרים שהמהפך נקרא מהפך מקור מתח (VSI) ואם מקור הקלט למהפך הוא מקור זרם הוא נקרא מהפך מקור זרם (CSI) . הממירים מסווגים לשני סוגים על פי סוג העומס בו משתמשים, כלומר, שלב בודד ממירים, וממירים תלת פאזיים. ממירים חד פאזיים מסווגים עוד לשני סוגים של מהפך חצי גשר ומהפך גשר מלא. מאמר זה מסביר את הבנייה והעבודה המפורטים של מהפך בגשר מלא.
מהו מהפך גשר מלא שלב אחד?
הַגדָרָה: מהפך חד פאזי חד גשר מלא הוא מכשיר מיתוג המייצר מתח יציאת AC גל מרובע ביישום כניסת DC על ידי כוונון המתג המופעל ומונע על בסיס רצף המיתוג המתאים, כאשר מתח המוצא שנוצר הוא בצורה + Vdc. , -Vdc, או 0.
סיווג ממירים
הממירים מסווגים ל -5 סוגים שהם
על פי מאפייני התפוקה
- מהפך גל מרובע
- מהפך הגלים שלו
- מהפך גלי סינוס שונה.
על פי מקור המהפך
- מהפך מקור נוכחי
- מהפך מקור מתח
על פי סוג העומס
- מהפך חצי גשר
- מהפך גשר מלא
ממירים תלת פאזיים
- מצב של 180 מעלות
- מצב של 120 מעלות
על פי טכניקת PWM שונה
- פָּשׁוּט אפנון רוחב הדופק (SPWM)
- אפנון רוחב דופק מרובה (MPWM)
- אפנון רוחב דופק סינוסואידי (SPWM)
- שינוי אפנון רוחב הדופק הסינוסי (MSPWM)
על פי מספר רמות התפוקה.
- ממירים ברמה 2 רגילה
- מהפך רב-מפלסי.
בְּנִיָה
בנייתו של מהפך גשר מלא היא, הוא מורכב מ -4 מסוקים כאשר כל מסוק מורכב מזוג טרָנזִיסטוֹר או תיריסטור וא דיודה , זוג מחובר יחד כלומר
- T1 ו- D1 מחוברים במקביל,
- T4 ו- D2 מחוברים במקביל,
- T3 ו- D3 מחוברים במקביל, ו-
- T2 ו- D4 מחוברים במקביל.
עומס V0 מחובר בין זוג המסוקים ב- 'AB' ומסופי הקצה של T1 ו- T4 מחוברים למקור המתח VDC כמוצג להלן.

דיאגרמת מעגל של מהפך חד-פאזי בגשר מלא
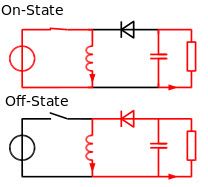
ניתן לייצג מעגל שווה ערך בצורה של המתג כמוצג להלן

משוואת זרם דיודה
עבודה של מהפך גשר מלא שלב אחד
העבודה של גשר מלא חד פאזי באמצעות עומס RLC ניתן להסביר את המהפך באמצעות התרחישים הבאים
שעבור יתר על המידה ותת שיטול יתר
מגרף ב 0 עד T / 2 אם אנו מיישמים עירור DC על עומס RLC. זרם עומס המוצא המתקבל הוא בצורת הגל הסינוסי. מכיוון שמשתמשים בעומס RLC, הריאקטיביות של עומס ה- RLC מיוצגת בשני תנאים כ- XL ו- XC
Codition1: אם XL> XC, זה מתנהג כמו עומס בפיגור ואומרים שהוא נקרא כמערכת מוגזמת מדי
מצב 2: אם XL טופס גל מהפך גשר מלא זווית הולכה של כל אחד החלף וכל דיודה ניתן לקבוע באמצעות צורת הגל של V0 ו- I0. תיק 1: מ φ עד π, V0> 0 ו- I0> 0 ואז מתגים S1, S2 מוליך תיק 1: מ- 0 ל- π - φ, V0> 0 ו- I0> 0 ואז מתגים S1, S2 מוליך מקרה 2: מ π - φ עד π, V0> 0 ו- I0<0 then diodes D1, D2 conducts מקרה 3: מ π ל 2 π - φ, V0<0 and I0 < 0 then switches S3, S4 conducts מקרה 4: טופס 2 π - φ עד 2 π, V0 0 ואז הדיודות D3, D4 מוליכות מקרה 5: לפני התנהלות φ עד 0, D3 ו- D4. לכן זווית ההולכה של כל דיודה היא 'פי' וזווית ההולכה של כל אחד תיריסטור או טרנזיסטור הוא 'Π - φ'. ניתן להתבונן על מצב של מעבר עצמי במצב עומס מוביל מהגרף אנו יכולים לראות כי 'φ עד π - φ', S1 ו- S2 מוליכים ואחרי 'π - φ', D1, D2 מוליכים, בשלב זה, ירידת המתח קדימה על פני D1 ו- D2 היא 1 וולט. כאשר S1 ו- S2 פונים למתח שלילי לאחר 'π - φ' וכך S1 ו- S2 מכבים. מכאן שנסיעה עצמית אפשרית במקרה זה. טופס גל מהפך גשר מלא ניתן להתבונן במצב של תחלופה כפויה במצב עומס בפיגור מהגרף אנו יכולים לראות כי 'o עד φ', D1 ו- D2 מוליכים, ומ- π ל- φ, S1 ו- S2 מוליכים וקצרים. לאחר 'φ' D3 ו- D4 מתנהלים רק אם S1 ו- S2 כבויים, אך ניתן למלא מצב זה רק על ידי אילוץ S1 ו- S2 לכבות. לפיכך אנו משתמשים במושג כפוי החלפה . 1). זווית ההולכה של כל דיודה היא פי 2). זווית ההולכה של כל תיריסטור היא π - φ . 3). נסיעה עצמית אפשרית רק בעומס מוביל של גורם כוח או במערכת נמוכה פחות בזמן כיבוי המעגל tג= φ / w0 .איפה w0 הוא התדר הבסיסי. 4). סדרת פורייה ו0(t) = ∑n = 1,3,5א[4 וולטזֶרֶם יָשָׁר/ nπ] חטא n w0t 5). אני0(t) = ∑n = 1,3,5א[4 וולטזֶרֶם יָשָׁר/ nπ l zנl] Sin n w0t + φנ 6). ו01 מקסימום= 4 וולטזֶרֶם יָשָׁר/ פאי 7). אני01 מקסימום= 4 וולטזֶרֶם יָשָׁר/ π Z1 8). מוד זינ= רשתיים+ (n w0L - 1 / n w0C) כאשר n = 1,2,3,4 ... .. 9). פינ= כך-1[( / R] 10). גורם עקירה בסיסי FDF= cos פי 11). משוואת זרם דיודה Iדוצורת הגל ניתנת כדלקמן אניD01 (ממוצע)= 1 / 2π [∫0פיאני01 מקסימוםחטא (w0t - φ1)] dwt אניD01 (RMS)= [1 / 2π [∫0פיאני01שתייםמקסימוםלְלֹאשתיים(נ0t - φ1) dwt]]1/2 משוואת זרם דיודה 12). משוואת זרם מתג או תיריסטור Iטוצורת הגל ניתנת כדלקמן אניT01 (ממוצע)= 1 / 2π [∫פיפאיאני01 מקסימוםחטא (w0t - φ1)] dwt אניT01 (RMS)= [1 / 2π [∫פיפאיאני01שתייםמקסימוםלְלֹאשתיים(נ0t - φ1) dwt]]1/2 טופס גל תיריסטור להלן היתרונות להלן החסרונות להלן היישומים לכן, מהפך הוא מכשיר חשמלי הממיר אספקת כניסת DC למתח AC אסימטרי בעוצמה ותדר סטנדרטיים בצד הפלט. על פי סוג העומס מהפך חד פאזי מסווג לשני סוגים, כמו מהפך חצי גשר ומהפך גשר מלא. מאמר זה מסביר על מהפך חד פאזי בגשר מלא. הוא מורכב מארבעה תיריסטורים ו -4 דיודות אשר יחד מתנהגות כמו מתגים. בהתאם למיקומי המתג, פועל מהפך הגשר המלא. היתרון העיקרי של הגשר המלא על פני חצי הגשר הוא שמתח המוצא הוא כפול מתח הכניסה והספק המוצא הוא פי 4 בהשוואה לממיר חצי גשר.
זווית הולכה
במצב עומס בפיגור
מקרה 2: מ- 0 עד φ, V0> 0 ו- I0<0 then diodes D1, D2 conducts
מקרה 3: מ π + φ עד 2 π, V0<0 and I0 < 0 then switches S3, S4 conducts
מקרה 4: צורה π עד π + φ, V0 0 ואז דיודות D3, D4 מוליכות.במצב עומס מוביל
שינויים בכפייה והסבה עצמית
נוסחאות


יתרונות מהפך גשר מלא שלב אחד
חסרונות מהפך גשר מלא שלב אחד
יישומים של מהפך גשר מלא שלב אחד