בפוסט זה אנו דנים ביצירת מעגל בקר מהירות אינדוקציה תלת פאזי פשוט, אשר ניתן ליישם גם עבור מנוע אינדוקציה חד פאזי או פשוטו כמשמעו עבור כל סוג של מנוע זרם חילופין.
כשזה מגיע ל שליטה על מהירות מנועי האינדוקציה , בדרך כלל משתמשים בממירי מטריצה, הכוללים שלבים מורכבים רבים כגון מסנני LC, מערכים דו כיווניים של מתגים (באמצעות IGBT) וכו '.
כל אלה משמשים להשגת בסופו של דבר אות AC קצוץ שאפשר לכוונן את מחזור החובה שלו באמצעות מעגל מיקרו-בקר מורכב, ולבסוף לספק את בקרת מהירות המנוע הנדרשת.
עם זאת אנו יכולים להתנסות ולנסות להשיג בקרת מהירות מנוע אינדוקציה תלת-פאזית באמצעות מושג פשוט בהרבה באמצעות ICs מצמד אופטו של גלאי מעבר אפס מתקדם, טריאק כוח ומעגל PWM.
שימוש בגלאי אפס מצמד אופטו
הודות לסדרת MOC של מצמדים אופטיים שהפכה את מעגלי בקרת הטריאק לבטוחים ביותר וקלים לתצורה, ומאפשרים שילוב PWM ללא טרחה עבור הפקדים המיועדים.
באחד מההודעות הקודמות שלי דנתי בפשטות מעגל בקר מנוע התחלה רכה של PWM שהטמיע את MOC3063 IC למתן התחלה רכה יעילה במנוע המחובר.
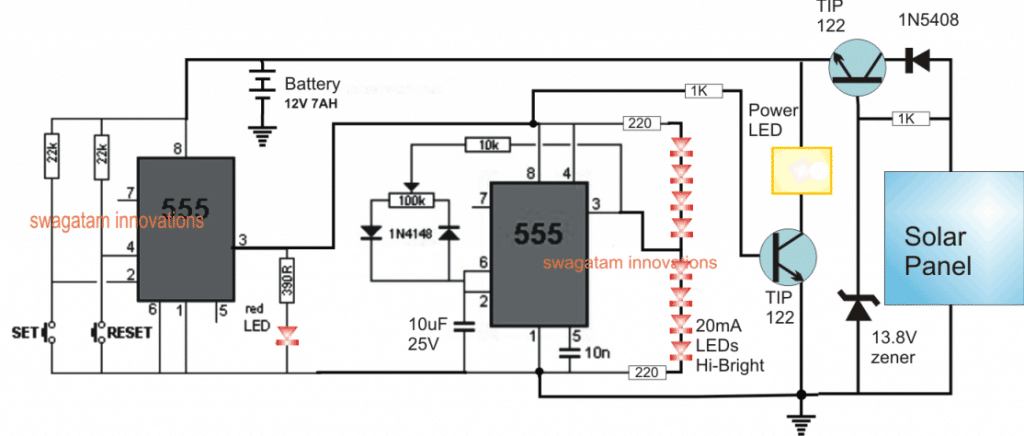
גם כאן אנו משתמשים בשיטה זהה לאכיפת מעגל בקר המהירות המנוע אינדוקציה תלת פאזי המוצע, התמונה הבאה מראה כיצד ניתן לעשות זאת:
באיור אנו יכולים לראות שלושה שלבי מצמד אופטו MOC זהים שהוגדרו במצב רגולטור הטריאק הרגיל שלהם, וצד הקלט משולב עם מעגל IC 555 PWM פשוט .
3 מעגלי ה- MOC מוגדרים לטיפול בכניסת החשמל התלת-פאזית ומסירתם למנוע ההשראה המצורף.
קלט ה- PWM בצד בקרת ה- LED המבודד של האופטו קובע את יחס הקיצוץ של קלט ה- AC 3-פאזיים אשר מעובד על ידי ICS MOC.
באמצעות בקר IC 555 PWM (החלפת מתח אפס)
זה מרמז על ידי התאמת ה- סיר PWM המשויך ל- 555 IC אפשר לשלוט ביעילות על מהירות מנוע האינדוקציה.
הפלט בסיכה 3 שלו מגיע עם מחזור חובה משתנה אשר בתורו מחליף את triacs הפלט בהתאם, וכתוצאה מכך מגדיל את ערך ה- AC RMS או מקטין אותו.
הגדלת ה- RMS באמצעות PWM רחבים יותר מאפשרת לרכוש מהירות גבוהה יותר על המנוע, בעוד שהקטנת ה- RMS AC באמצעות PWM צרים יותר מייצרת אפקט הפוך, כלומר גורם להאטה פרופורציונאלית.
התכונות שלעיל מיושמות עם דיוק ובטיחות רבים שכן ה- ICs מוקצים עם תכונות מתוחכמות פנימיות רבות, המיועדות במיוחד עבור נהיגה בטריאק ועומסי אינדוקציה כבדים כגון מנועי אינדוקציה, סולנואידים, שסתומים, מגעים, ממסרי מצב מוצק וכו '.
IC גם מבטיח פעולה מבודדת לחלוטין לשלב DC המאפשרת למשתמש לבצע את ההתאמות ללא חשש מהתחשמלות.
העיקרון יכול לשמש גם ביעילות לבקרת מהירות מנוע חד פאזית, על ידי שימוש ב- IC MOC יחיד במקום 3.
העיצוב מבוסס למעשה על כונן טריאק פרופורציונלי בזמן תֵאוֹרִיָה. ניתן לכוונן את מעגל ה- PWM העליון IC555 לייצר מחזור חובה של 50% בתדירות גבוהה בהרבה, ואילו מעגל ה- PWM התחתון עשוי לשמש ליישום פעולת בקרת המהירות של מנוע האינדוקציה באמצעות התאמות הסיר המשויך.
מומלץ 555 IC זה בעל תדירות נמוכה יחסית למעגל IC 555 העליון. זה יכול להיעשות על ידי הגדלת הקבל סיכה מס '6/2 לסביבות 100nF.

הערה: הוספת אינדיקטורים מתאימים בסדרות עם חוטי הפאזות יכולים לשפר באופן דרסטי את ביצועי בקרת המהירות של המערכת.
הנחת צורת גל ובקרת שלב באמצעות הרעיון הנ'ל:

השיטה המוסברת לעיל לשליטה במנוע אינדוקציה תלת פאזי היא למעשה גסה למדי שכן ללא בקרת V / Hz .
היא פשוט מפעילה הפעלה / כיבוי של הרשת בקצב שונה בכדי לייצר הספק ממוצע למנוע ולשלוט במהירות באמצעות שינוי זרם חילופין ממוצע זה למנוע.
דמיין אם תפעיל / כבה את המנוע באופן ידני 40 פעמים או 50 פעמים בדקה. זה יביא לכך שהמנוע שלך מאט לערך ממוצע יחסי, אך עם זאת נע ברציפות. העיקרון הנ'ל פועל באותו אופן.
גישה טכנית יותר היא תכנון מעגל המבטיח שליטה נכונה ביחס V / Hz ומתאים אותו באופן אוטומטי בהתאם למהירות ההחלקה או לתנודות מתח כלשהן.
לשם כך אנו בעצם משתמשים בשלבים הבאים:
- מעגל נהג IGBT H-Bridge או Full Bridge
- שלב מחולל תלת פאזי להזנת מעגל הגשר המלא
- מעבד V / Hz PWM
באמצעות מעגל בקרת IGBT מלא
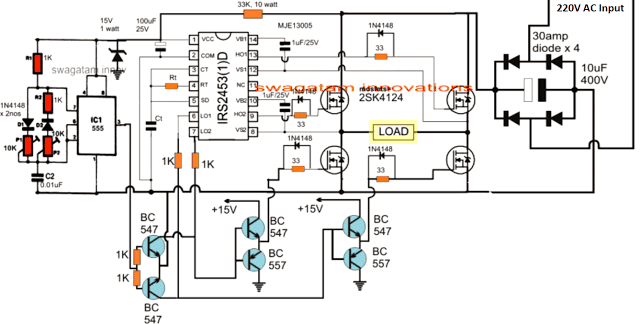
אם נהלי ההתקנה של התכנון המבוסס על טריאק לעיל נראים לך מרתיעים, ניתן לנסות את בקרת המהירות המנועתית אינדוקציה מבוססת PWM בגשר מלא:

המעגל המוצג באיור לעיל משתמש במנהל התקן מלא של שבב יחיד IC IRS2330 (הגרסה האחרונה היא 6EDL04I06NT) הכוללת את כל התכונות המובנות במטרה לספק תפעול מנועי בטוח ושלב מושלם.
ה- IC זקוק רק לקלט לוגיקה תלת פאזי מסונכרן על פני פינות ה- HIN / LIN שלו ליצירת פלט תנודה תלת פאזי הנדרש, שמשמש לבסוף להפעלת רשת IGBT הגשר המלאה ואת המנוע התלת-פאזי המחובר.
ה הזרקת PWM לבקרת מהירות מיושם באמצעות שלושה שלבי נהגים נפרדים למחצה של NPN / PNP, הנשלטים באמצעות הזנת SPWM ממחולל IC 555 PWM כפי שניתן לראות בעיצובים הקודמים שלנו. בסופו של דבר ניתן להשתמש ברמת PWM זו לבקרת מהירות מנוע האינדוקציה.
לפני שנלמד את שיטת בקרת המהירות בפועל עבור מנוע האינדוקציה, בואו קודם להבין כיצד האוטומטי בקרת V / Hz ניתן להשיג באמצעות כמה מעגלי IC 555, כמפורט להלן
מעגל המעבד האוטומטי V / Hz PWM (לולאה סגורה)
בסעיפים לעיל למדנו את העיצובים שיעזרו למנוע האינדוקציה לנוע בקצב הנקוב על ידי היצרן, אך הוא לא יסתגל בהתאם ליחס קבוע של V / Hz, אלא אם כן מעבד PWM הבא משולב ב- H - הזנת קלט PWM של Bridge.

המעגל הנ'ל הוא פשוט מחולל PWM באמצעות כמה IC 555 . IC1 מייצר את תדר ה- PWM המומר לגלי משולש בסיכה 6 של IC2 בעזרת R4 / C3.
גלי משולש אלה מושווים לאדווה הגלית בסיכה מספר 5 של IC2. אדוות דגימות אלה נרכשות על ידי תיקון רשת החשמל התלת-פאזית לאדווה של 12 וולט AC ומוזנות לסיכה מספר 5 של ה- IC2 לצורך העיבוד הנדרש.
על ידי השוואת צורת הגל השנייה, ממד הולם נוצר SPWM בסיכה מס '3 של IC2, ההופכת ל- PWM המניע לרשת H-bridge.
איך עובד מעגל V / Hz
כאשר ההפעלה מופעלת, הקבל בסיכה מס '5 מתחיל בהסבת מתח אפס בסיכה מס' 5 הגורם לערך SPWM הנמוך ביותר ל מעגל גשר H , אשר בתורו מאפשר למנוע האינדוקציה להתחיל עם התחלה רכה הדרגתית איטית.
ככל שקבל זה נטען, הפוטנציאל בסיכה מס '5 עולה אשר מעלה באופן יחסי את ה- SPWM ומאפשר למנוע לזכות במהירות בהדרגה.
אנו יכולים גם לראות מעגל משוב טכומטר המשולב גם בסיכה מספר 5 של ה- IC2.
זֶה טכומטר עוקב אחר מהירות הרוטור או מהירות ההחלקה ויוצר מתח נוסף בסיכה מספר 5 של IC2.
כעת ככל שמהירות המנוע עולה במהירות ההחלקה מנסה להסתנכרן עם תדר הסטטור ובתהליך זה מתחיל לצבור מהירות.
עלייה זו בתלוש האינדוקציה מגדילה את מתח הטכומטר באופן פרופורציונלי מה שגורם בתור IC2 להגדיל את פלט SPWM וזה בתורו מגביר עוד יותר את מהירות המנוע.
ההתאמה שלעיל מנסה לשמור על יחס V / Hz לרמה קבועה למדי עד שלבסוף כאשר ה- SPWM מ- IC2 אינו יכול להגדיל עוד יותר.
בשלב זה מהירות ההחלקה ומהירות הסטאטור רוכשים מצב יציב וזה נשמר עד שמתח הקלט או מהירות ההחלקה (עקב העומס) לא משתנים. במקרה שאלה ישתנו מעגל המעבד V / Hz שוב נכנס לפעולה ומתחיל להתאים את היחס לשמירה על התגובה האופטימלית של מהירות המנוע האינדוקציה.
טכומטר
ה מעגל טכומטר ניתן גם לבנות בזול באמצעות המעגל הפשוט הבא ולשלב בשלבי המעגל המוסברים לעיל:

כיצד ליישם את בקרת המהירות
בפסקאות לעיל הבנו את תהליך הוויסות האוטומטי שיכול להיות מושגת על ידי שילוב a משוב טכומטר למעגל בקרת SPWM לוויסות אוטומטי.
עכשיו בואו ללמוד כיצד ניתן לשלוט על מהירות מנוע אינדוקציה על ידי שינוי התדר, מה שבסופו של דבר יאלץ את ה- SPWM לרדת ולשמור על יחס V / Hz הנכון.
התרשים הבא מסביר את שלב בקרת המהירות:

כאן אנו יכולים לראות מעגל גנרטור תלת פאזי המשתמש ב- IC 4035 שתדירות הסטת הפאזות שלו יכולה להיות מגוונת על ידי שינוי קלט השעון בסיכה מספר 6 שלו.
אותות התלת פאזה מוחלים על פני שערי 4049 IC לייצור הזנות HIN, LIN הנדרשות לרשת הנהגים המלאה.
זה מרמז כי על ידי שינוי מתאים בתדר השעון של IC 4035, אנו יכולים לשנות ביעילות את תדר הפעולה התלת-פאזי של מנוע האינדוקציה.
זה מיושם באמצעות מעגל אסתטי פשוט IC 555 אשר מזין תדר מתכוונן בסיכה מס '6 של IC 4035 ומאפשר לכוונן את התדר באמצעות סיר 100K המצורף. יש לחשב את הקבל C כך שטווח התדרים המתכוונן יגיע למפרט הנכון של מנוע האינדוקציה המחובר.
כאשר סיר התדרים משתנה, משתנה גם התדר האפקטיבי של מנוע האינדוקציה, מה שמשנה בהתאם את מהירות המנוע.
לדוגמא כאשר התדר מופחת, גורם להפחתת מהירות המנוע, מה שבתורו גורם ליציאת הטכומטר להפחית את המתח באופן פרופורציונלי.
הפחתה פרופורציונאלית זו ביציאת הטכומטר מאלצת את ה- SPWM להצטמצם ובכך מושכת את תפוקת המתח למנוע באופן יחסי.
פעולה זו בתורה מבטיחה כי יחס V / Hz נשמר תוך שליטה על מהירות המנוע האינדוקציה באמצעות בקרת תדרים.
אזהרה: הרעיון שלעיל מתוכנן על בסיס הנחות תיאורטיות בלבד, אנא המשך בזהירות.
אם יש לך ספק נוסף בנוגע לתכנון בקר מהירות אינדוקציה תלת פאזי זה, אתה מוזמן לפרסם אותו באמצעות הערותיך.
קודם: כיצד לתכנן מעגל אספקת חשמל ללא הפרעה (UPS) הבא: הפעלה / כיבוי של שני עומסים חלופיים עם IC 555