כיום, הטכנולוגיה ממלאת תפקיד רחב בחיי היום יום שלנו. עם ה פיתוח מהיר של טכנולוגיה , כולם מכורים לגאדג'טים ואינטרנט מודרניים. הטכנולוגיה האלחוטית הפחיתה עוד יותר את המאמץ האנושי והפעילה לאמץ שיטות חדשות, יעילות וחסכוניות, והותירה אחריה את השיטות המקובלות. טכנולוגיות אלחוטיות כמו זיגבי, Bluetooth, wifi, אותות RF משמשים לשליטה ולהפעלה של יישומים שונים ולהגיב בהתאם.
מטרת הפרויקט היא ליצור טלפון חכם או טאבלט מבוסס אנדרואיד לשליטה במכוניות. אנדרואיד היא מערכת הפעלה בשפת לינוקס. הוא פותח מהיסוד בכדי לעזור למפתחים ליצור אפליקציה סלולרית לשימוש יעיל במכשירים ניידים עם מחוות מגע, פקודה קולית וכו '. זהו קוד פתוח עם ממשק המשתמש של Java.

דְמוּי אָדָם
מערכת רכב מבוקרת אנדרואיד
מכונית נשלטת על ידי אנדרואיד מאפשרת למשתמש לשלוט במכונית הסוללה באופן אלחוטי באמצעות מכשיר אנדרואיד. למערכת זו יש מודול Bluetooth כמדיום להעברת נתונים בין הרכב למכשיר האנדרואיד. הנתונים שמקבלים ה- Bluetooth מעובדים על ידי מיקרו-בקר 8051 המבצע את הפעולה הרצויה.
תרשים בלוקים

דיאגרמת חסימה עבור מכונית נשלטת על ידי Android באמצעות מיקרו-בקר 8051
דרישות חומרה
- 8051 מיקרו-בקר
- מכשיר אנדרואיד
- גוף הרובוט
- מכשיר Bluetooth
- מנועי DC
- נהג מנוע IC
- גָבִישׁ
- ווסת מתח
- נגדים, קבלים
- סוֹלְלָה
דרישות תוכנה
- תוכנת טריז
- שפת C משובצת
הפעלת מערכת מכוניות מבוקרת אנדרואיד
למכשיר האנדרואיד יש יישום המספק למשתמש ממשק משתמש (ממשק משתמש גרפי) לשליחת הפקודות באמצעות מחוות המגע שלהם. הפקודות נשלחות לרכב באמצעות מכשיר Bluetooth פעיל בצורה של משתני מחרוזות.

מכונית נשלטת עם Android
ה- Bluetooth הקיים ברכב מקבל את נתוני המיתרים אשר מוזנים למיקרו-בקר. המיקרו-בקר מעבד את הנתונים ובודק אחר פקודות המשתמש. בזיהוי הפקודות (קדימה / אחורה / שמאלה / ימינה) המיקרו-בקר שולח את המידע אל ה- נהג IC . ואז IC הנהג מפעיל את המנוע כדי לבצע את הפעולה הרצויה. מערכת זו ממשיכה בכל מחווה של המשתמש לשלוט ברכב.
מודול Bluetooth
Bluetooth הוא מכשיר אלחוטי משמש להעברת נתונים בטווח קצר. הוא משתמש באותות רדיו לצורך תקשורת. יש לו יכולת לתקשר עם מכשירים רבים ללא ממשק כלשהו. הוא פועל במהירות של 2.45 GHz.
נהג מנוע IC
L293D הוא נהג מנוע טיפוסי טיפוסי. ל- IC זה 16 פינים המשמשים לשליטה על קבוצה של מנוע DC בכל הכיוונים. IC זה עובד על פי העיקרון של גשר H. גשר H הוא מעגל אלקטרוני המאפשר הפעלת מתח על פני העומס לכל כיוון. זה משמש בדרך כלל ברובוטיקה כדי לאפשר למנוע DC לרוץ קדימה או אחורה.
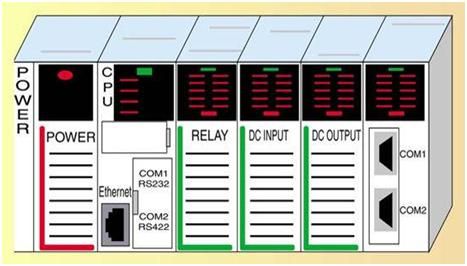
8051 מיקרו-בקר
מיקרו-בקר הוא שבב משולב מאוד או מעבד עם כל ציוד היקפי כמו RAM, ROM, יציאות קלט / פלט, טיימרים ADC וכו 'על גבי שבב יחיד. זהו שבב ייעודי הנקרא כמחשב שבב יחיד.
מיקרו-בקר 8051 הוא מיקרו-בקר פופולרי בן 8 סיביות. הוא מבוסס על ליבת CISC של 8 סיביות של אדריכלות הרווארד. זה זמין כשבב סיכה של 40 פינים ועובד עם קלט DC 5 וולט.
דיאגרמת חסימה של מיקרו-בקר 8051

דיאגרמת חסימה של מיקרו-בקר 8051
תכונות בולטות של מיקרו-בקר 8051
- זיכרון תוכנית 4KB על שבב (ROM ו- EPROM).
- 128 בתים זיכרון נתונים על שבב (RAM).
- אוטובוס נתונים של 8 סיביות, סיביות של 16 סיביות ושני טיימרים של 16 סיביות T0 ו- T1
- 32 מטיילים כלליים רושמים כל אחד מ 8 ביטים וחמש הפרעות.
- ארבע יציאות מקבילות שכל אחת מהן 8 ביטים עם סה'כ קווי I / O.
- מונה תוכנית 16 סיביות אחד, מצביע מחסנית אחד ומצביע נתונים 16 סיביות אחד.
- מחזור הוראות מיקרו-שנייה אחד עם גביש 12 מגה-הרץ.
- יציאת תקשורת טורית כפולה דו-צדדית.
תיאור סיכה
מיקרו-בקר 8051 זמין בתצורת DIP של 40 פינים. בין 40 פינים, 32 סיכות מוקצות לארבע יציאות מקבילות P0, P1, P2 ו- P3, כאשר כל יציאה תופסת 8 פינים. הסיכות הנותרות הן VCC, GND, XTAL1, XTAL2, RST, EA ו- PSEN.
ל מתנד קריסטל קוורץ מחובר על פני הפינים XTAL1 ו- XTAL2 עם ערך קבלים של 30pF. אם משתמשים במקור שאינו מתנד קריסטל, הפינים XTAL1 ו- XTAL2 נותרים פתוחים.
תקשורת סדרתית במיקרו-בקר 8051
למיקרו-בקר 8051 שני פינים להעברה ולקבלת הנתונים באמצעות תקשורת טורית. שני הפינים האלה הם חלק מיציאת P3 (P3.0 ו- P3.1). סיכות אלה תואמות TTL ומכאן שהן דורשות נהג קו שייצור אותן תואם RS232 . MAX232 משמש כמנהל קו. תקשורת טורית נשלטת על ידי רישום 8 סיביות הנקרא SCON register.
ממשק מנוע DC ל- 8051

ממשק מנוע DC עם מיקרו-בקר 8051
מנוע DC פועל על זרם ישר והוא מייצר מומנט באמצעות אנרגיה חשמלית ושדה מגנטי. מנוע DC דורש מומנט רב יותר בשלב הראשוני מאשר בשלב הריצה. מנועי DC דורשים הפעלה של זרם גדול, אשר יהרוס את ה- IC של המיקרו-בקר. מכאן שמשתמשים במעגל נהיגה עם אופטואזולטור ומנהג L293 כפול H-Bridge. האופטואיזולטור מספק הגנה נוספת למיקרו-בקר.
יישומי אנדרואיד
מערכת ההפעלה אנדרואיד מספקת פלטפורמה לפיתוח מגוון יישומים הפועלים בסמארטפונים לשיפור חייהם של בני האדם.
- Android משמש לפיתוח מערכת ניווט ומעקב מדויקת
- הוא משמש לפיתוח יישומי מדיה חברתית שונים המספקים את רשת האינטראקציה.
- זה עוזר בפיתוח אפליקציות בנקאות סלולריות שונות, העברת כספים.
- זה מאפשר קניות קלות.
- זה עוזר בפיתוח אפליקציות בטיחות ואבטחה שונות.
זה הכל על תכנון של מכונית נשלטת אנדרואיד באמצעות מיקרו-בקר 8051 המשתמשת במעגלי התקני נהג לתנועה ובסמארטפון לתקשורת אלחוטית באמצעות Bluetooth. למידע נוסף, פרויקטים מעניינים כאלה מגיעים אלינו באמצעות סעיף ההערות שלהלן